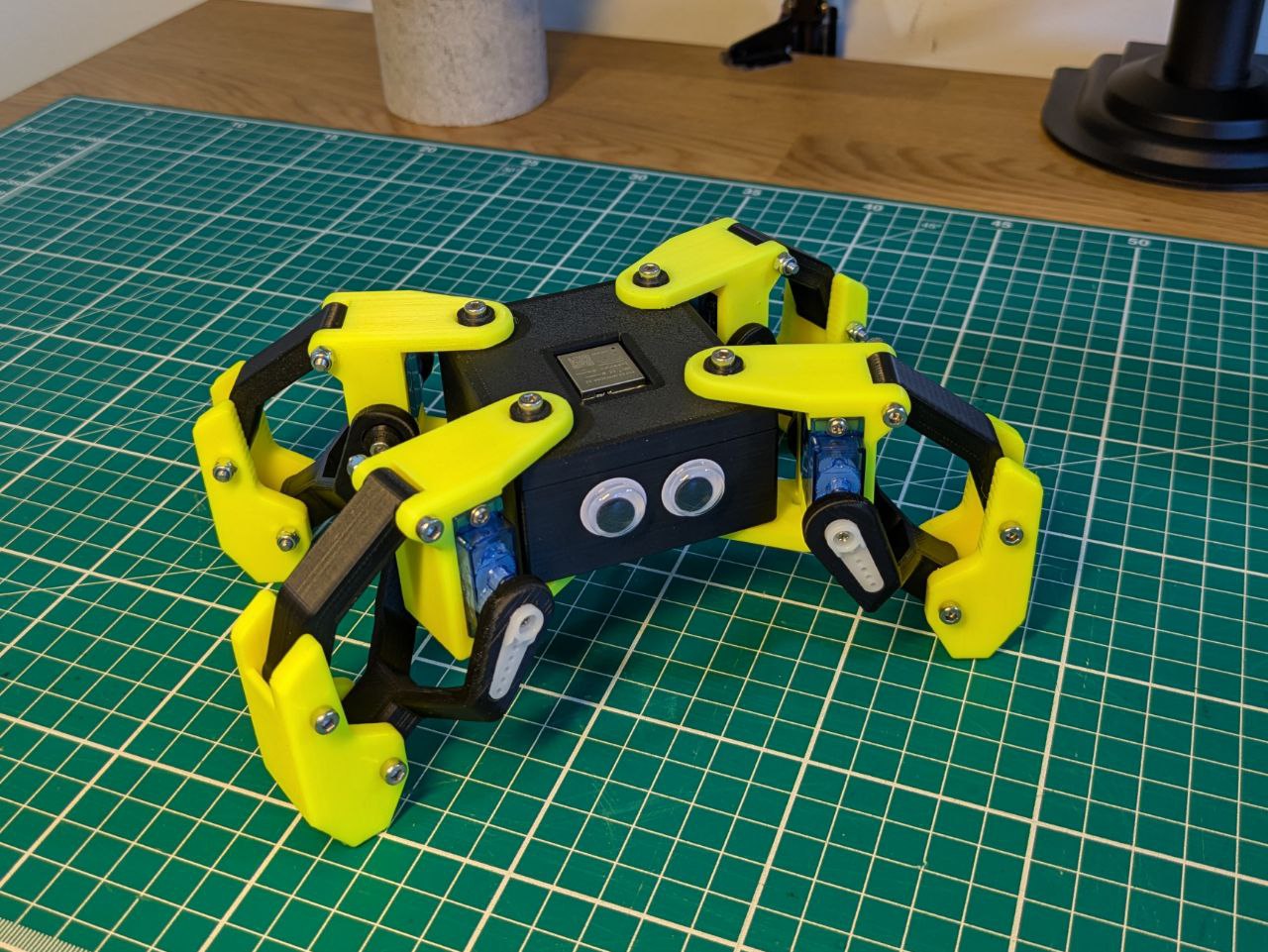
An open-source 3D-printed quadrupedal robot. Intuitive gait generation through 12-DOF Bezier Curves. Full 6-axis body po
An open-source 3D-printed quadrupedal robot. Intuitive gait generation through 12-DOF Bezier Curves. Full 6-axis body po
3/5
469
open-source
3d-printed
open-quadruped