OpenCatESP32 四足机器人框架
OpenCatEsp32-Quadruped-Robot
四足/人形机器人、ESP32
1/5
🧩 软硬件结合
已发布

项目简介
基于ESP32的开源四足机器人框架,用于开发波士顿动力式四足机器人。
基于ESP32的开源四足机器人宠物框架,用于开发波士顿动力风格的四足机器人,非常适合STEM、编程与机器人教育、物联网机器人应用、AI增强型机器人应用服务、研究以及DIY机器人套件开发。
标签
项目特点
**开源且模块化**:基于MIT许可证,所有代码和设计文件开放,方便二次开发和定制
**多平台控制**:支持手机App(iOS/Android)、遥控器、可视化编程(Blockly)等多种控制方式
**丰富的步态算法**:内置多种四足步态(行走、小跑、跳跃等),可自由切换和调整
**扩展性强**:支持添加摄像头、传感器、树莓派等外设,实现AI视觉、语音交互等高级功能
**教育友好**:提供详细的文档、教程和示例代码,适合从入门到进阶的机器人学习
**社区活跃**:GitHub上拥有221颗星,有活跃的开发者社区和持续更新
技术规格
| 主控芯片 | ESP32(双核240MHz,WiFi+蓝牙) |
|---|---|
| 舵机数量 | 8个(每条腿2个自由度) |
| 舵机类型 | 支持SG90、MG90S、MG996R等标准舵机 |
| 供电电压 | 6V-8.4V(2S锂电池) |
| 通信方式 | WiFi(HTTP/WebSocket)、蓝牙BLE |
| 控制接口 | 手机App、遥控器、串口、Web界面 |
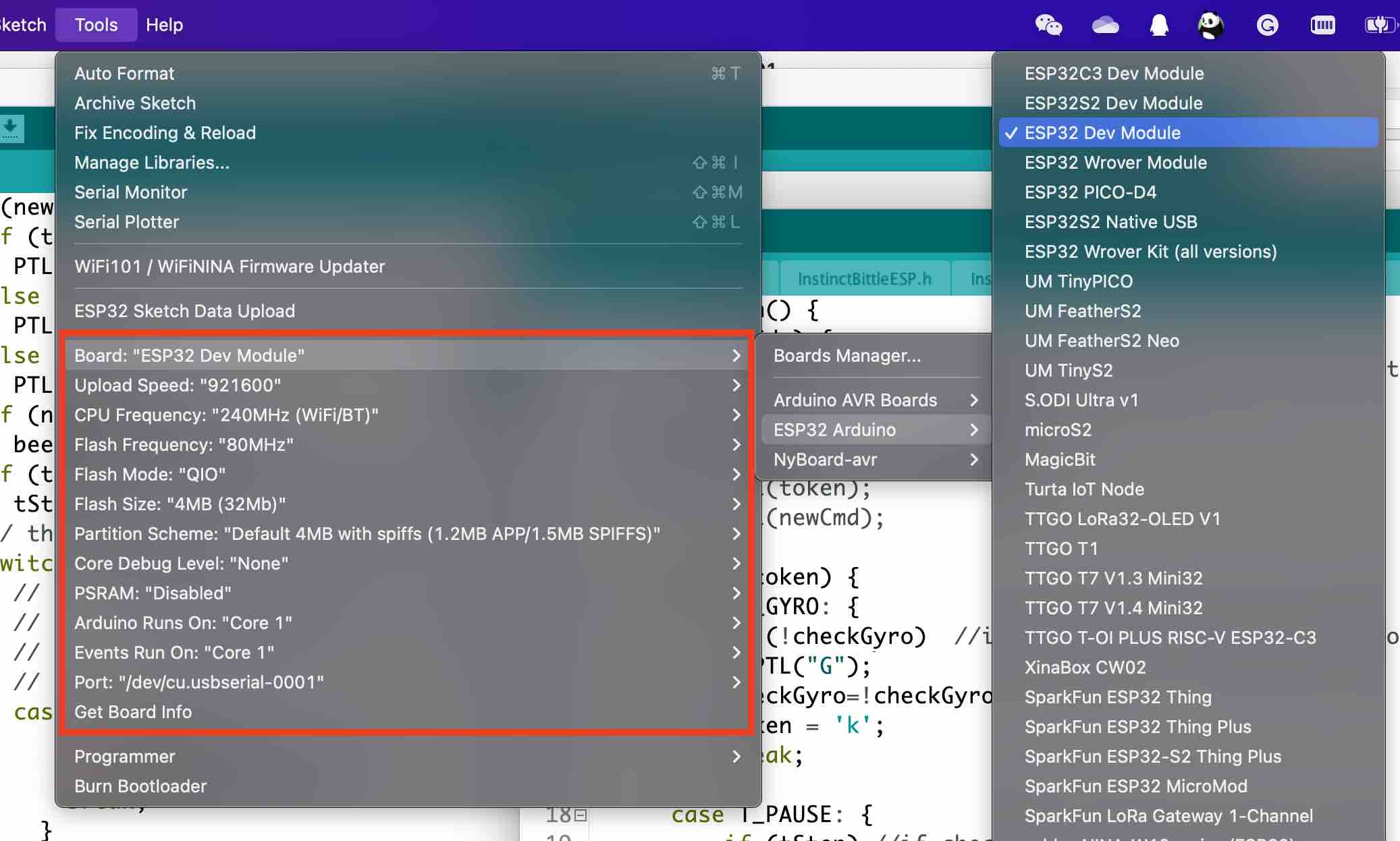
| 编程方式 | Arduino IDE、Blockly可视化编程、Python |
| 扩展接口 | I2C、SPI、UART、GPIO |
| 尺寸 | 约200mm x 150mm x 120mm(根据3D打印件) |
| 重量 | 约500g-800g(含电池和舵机) |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| ESP32开发板(如NodeMCU-32S) | 1 | — | 推荐带USB串口芯片 |
| SG90/MG90S微型舵机 | 8 | — | 每条腿2个,建议选金属齿轮 |
| 2S锂电池(7.4V) | 1 | — | 容量1000-2000mAh |
| 舵机供电板/稳压模块 | 1 | — | 5V/6V输出,电流≥5A |
| 3D打印机身零件 | 1套 | — | 约20个零件 |
| 螺丝螺母套装(M2/M3) | 1套 | — | 含垫片和螺柱 |
| 舵机支架/摇臂 | 8 | — | 与舵机配套 |
| 杜邦线(公母/母母) | 若干 | — | 用于电路连接 |
| 舵机延长线(20cm) | 8 | — | 可选,方便布线 |
| 超声波模块(HC-SR04) | 1 | — | 可选,用于避障 |
| MPU6050六轴陀螺仪 | 1 | — | 可选,用于姿态控制 |
| 蓝牙模块(HC-05/HC-06) | 1 | — | ESP32自带蓝牙,可选外置 |
| USB数据线(Micro USB) | 1 | — | 用于烧录和调试 |
能力画像
**记忆与知识检索**:3/5 — 项目文档和Wiki提供了丰富的技术资料,但需要用户自行查阅和理解
**动手与操作**:4/5 — 需要组装机械结构、焊接电路、调试舵机,动手要求较高
**编程与算法**:4/5 — 涉及Arduino编程、步态算法、WiFi通信,需要一定编程基础
**设计与建模**:3/5 — 提供现成3D打印文件,但修改和优化需要3D建模能力
**实验与调试**:4/5 — 步态调参、传感器校准、通信调试都需要反复实验
**协作与分享**:3/5 — 开源社区鼓励贡献代码和分享改造方案,但协作工具较少
**学习与研究**:5/5 — 涵盖机器人学、控制理论、物联网、AI等多个学科,学习价值极高
**系统集成**:4/5 — 需要整合硬件、固件、App、外设等多个子系统,集成难度适中
项目图库


所需技能
基础电子知识(电路连接、电源管理)
Arduino/C++编程基础
3D打印操作或机械组装能力
基本焊接技能
机器人运动学基础(步态算法理解)
WiFi/蓝牙通信原理
调试和故障排查能力
英文文档阅读能力(部分资料为英文)
适用场景
STEM教育和机器人课程教学
高校机器人实验室研究平台
创客空间和DIY爱好者项目
物联网机器人应用开发原型
AI视觉/语音交互机器人实验
四足步态算法研究与验证
机器人竞赛和展示项目
家庭娱乐和教育机器人宠物