NodeQuad V1 四足机器人
NodeQuad12-MicroPython
2/5
已发布

项目简介
使用NodeMUC-32S(ESP32)和MicroPython的蜘蛛四足机器人。
NodeQuad12-MicroPython 是一个基于 ESP32 和 MicroPython 的开源四足机器人项目,旨在以较低成本实现功能丰富的仿生蜘蛛机器人。项目核心采用 NodeMCU-32S 作为主控芯片,搭配 12 个 20Kg 级舵机作为执行器,通过 3D 打印的 PLA 机身和标准紧固件完成组装。机器人支持两种主要工作模式:在 MOVE 模式下可执行多种步态行走,在 POSE 模式下能实现 6 自由度的旋转和平移动作,具备较高的灵活性和可玩性。
标签
项目特点
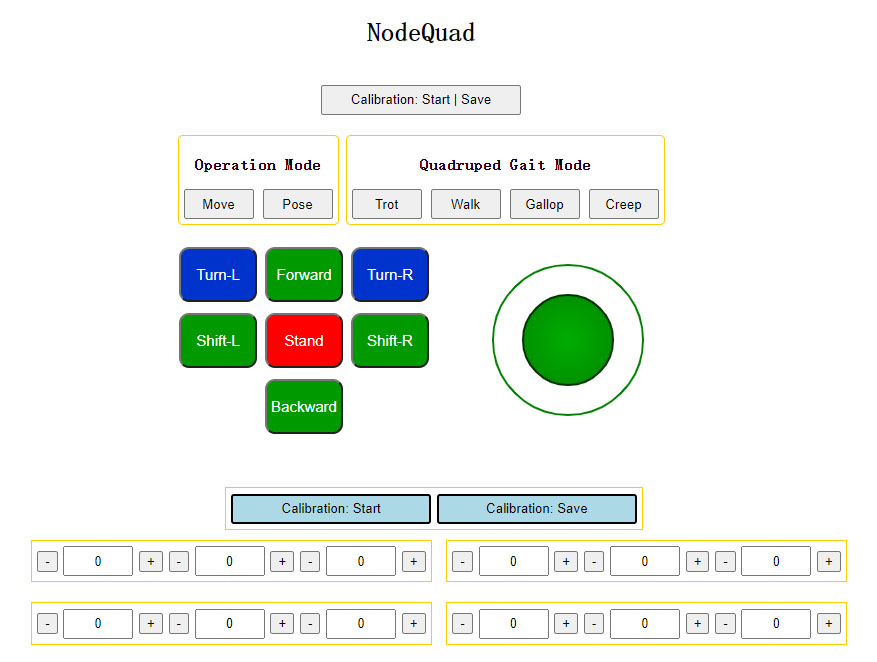
**双模式控制**:支持 **MOVE** 模式(多种步态行走)和 **POSE** 模式(6 自由度姿态调整)。
**Wi-Fi 远程控制**:通过 ESP32 的 Wi-Fi 功能,在浏览器中实现远程控制和舵机校准。
**12 个高扭矩舵机**:使用 12 个 20Kg 舵机,提供强大的驱动力。
**3D 打印机身**:主体结构采用 PLA 材料 3D 打印,易于定制和修改。
**MicroPython 编程**:使用 MicroPython 语言,降低了嵌入式开发的难度,便于快速迭代。
技术规格
| 主控芯片 | NodeMCU-32S (ESP32) |
|---|---|
| 编程语言 | MicroPython |
| 执行器 | 12 × 20Kg 舵机 |
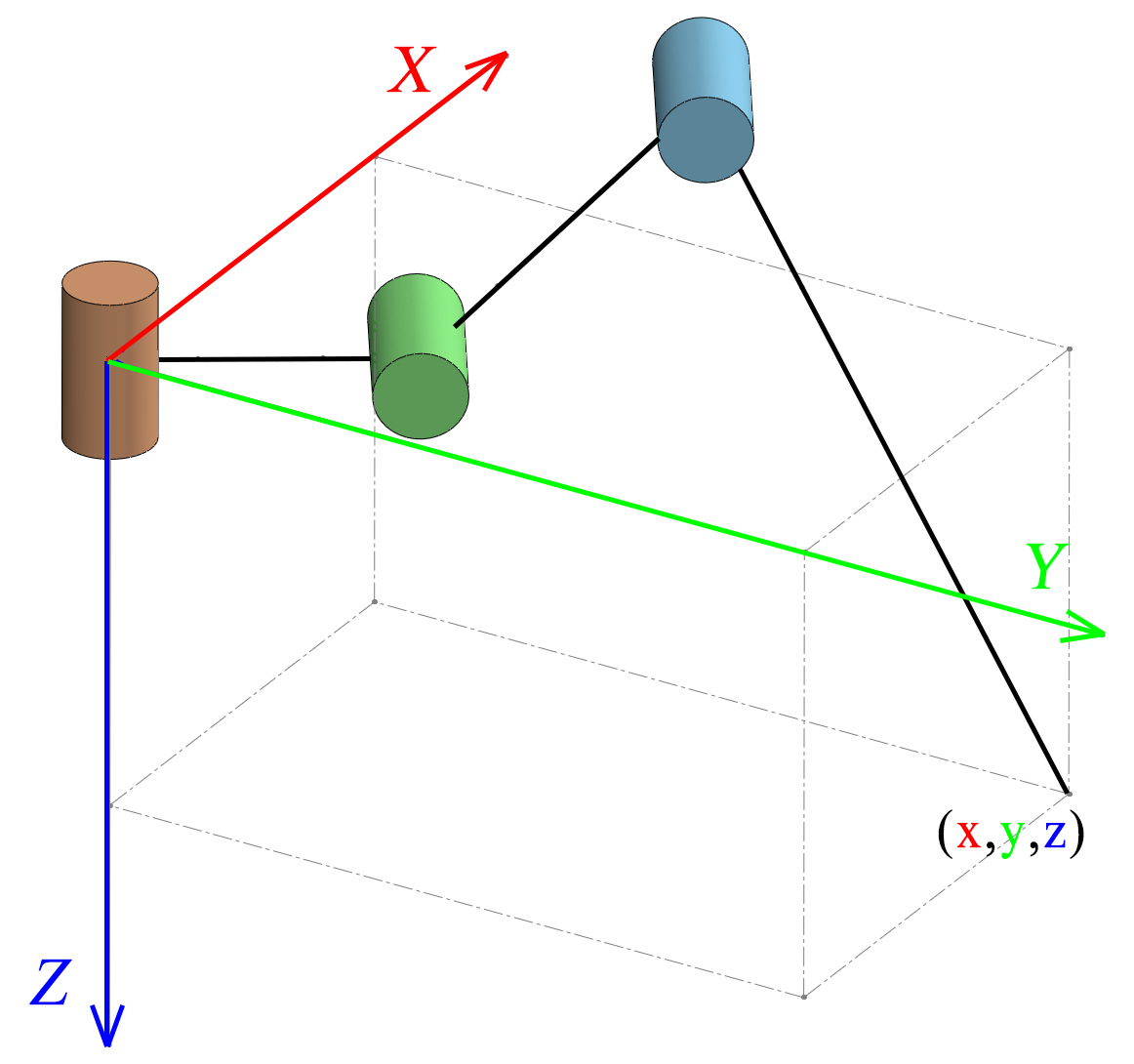
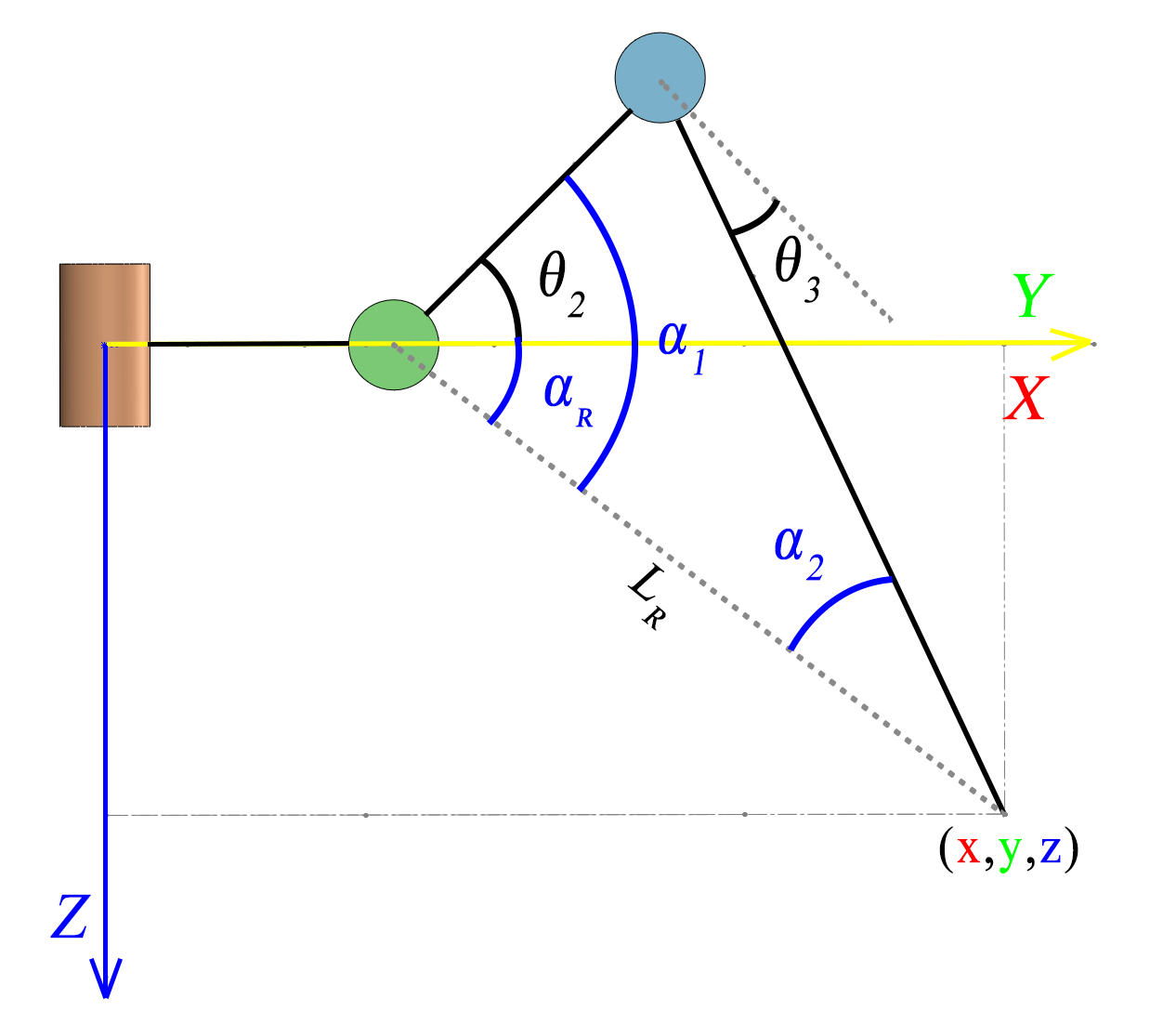
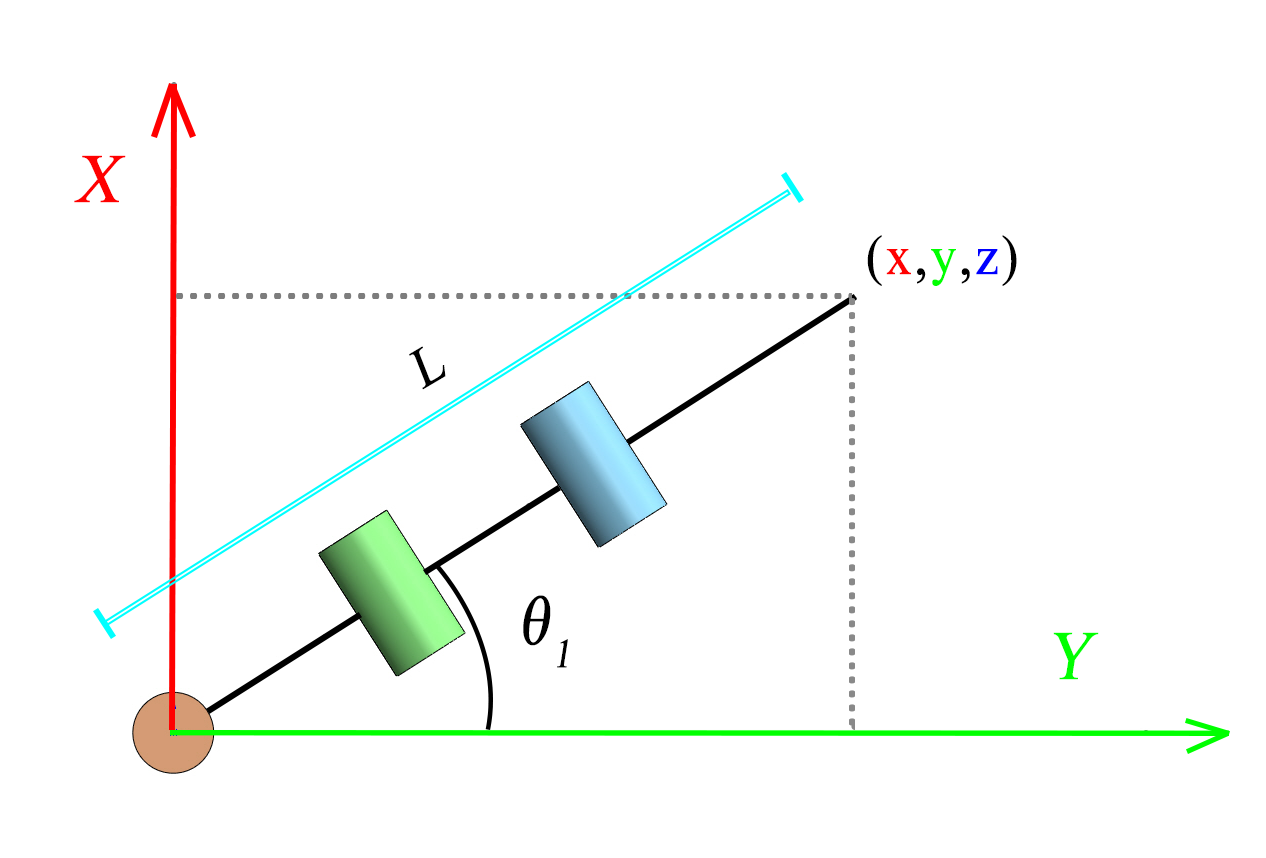
| 自由度 | 12 (每条腿 3 个) |
| 供电电池 | 3S 2200mAh 锂电池 |
| 电源管理 | mini360 DC-DC 降压模块 (为 ESP32, PCA9685, MPU6050 供电) |
| 电源管理 | 8A UBEC (为 12 个舵机供电) |
| 机身材料 | 3D 打印 PLA |
| 通信方式 | Wi-Fi (网页控制) |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| NodeMCU-32S (ESP32) | 1 | — | 主控 |
| 20Kg 舵机 | 12 | — | 执行器 |
| PCA9685 舵机驱动板 | 1 | — | 舵机控制 |
| MPU6050 陀螺仪 | 1 | — | 姿态检测 |
| mini360 DC-DC 降压模块 | 1 | — | 为 ESP32 等供电 |
| 8A UBEC | 1 | — | 为舵机供电 |
| 3S 2200mAh 锂电池 | 1 | — | 主电源 |
| M2 * 6mm 螺丝 | 48 | — | 舵机舵盘固定 |
| M2 * 45mm 螺丝 | 8 | — | 机身底板与顶板连接 |
| M2.5 * 8mm 螺丝 | 48 | — | 舵机安装 |
| M2.5 * 20mm 螺丝 | 8 | — | 胫骨连接 |
| M3 * 65mm 螺丝 | 8 | — | 股骨连接 |
| M3 * 10mm 螺丝 | 4 | — | 脚尖 |
| M3 * 12mm 螺丝 | 12 | — | 关节轴 |
| M2 螺母 | 8 | — | 机身底板与顶板连接 |
| M3 自锁螺母 | 12 | — | 关节轴 |
| 684ZZ 轴承 | 4 | — | 基节 |
| 624ZZ 轴承 | 8 | — | 股骨 & 胫骨 (各4个) |
3D 模型
能力画像
⚪ 记忆与知识检索: 2/5
🔵 逻辑推演: 3/5
⚪ 表达与交流: 1/5
⚪ 感知与观察: 2/5
🔵 数理与计算: 3/5
🔵 动手与操作: 5/5
⚪ 狂热与坚持: 4/5
🔵 创造与创新: 3/5
项目图库

所需技能
🔧 **动手能力**:需要熟练使用 3D 打印机、焊台和螺丝刀等工具,完成机器人的组装和布线。
💻 **编程能力**:需要具备 MicroPython 基础,能够理解并修改 ESP32 上的运动控制代码和 Web 服务器逻辑。
⚡ **电子电路**:需要了解锂电池、DC-DC 降压模块、UBEC 和舵机的供电原理,能够安全地进行电路连接和调试。
适用场景
**机器人爱好者入门**:作为学习四足机器人运动学、步态控制和 MicroPython 编程的实践项目。
**高校机器人课程**:作为嵌入式系统、机器人学课程的实验平台。
**创客制作**:适合有一定动手能力的创客制作一个功能丰富的桌面机器人。