ESP32四足机器人
esp32_quadruped
ESP32, 机器人
2/5
已发布

项目简介
使用ESP32的四足机器人。
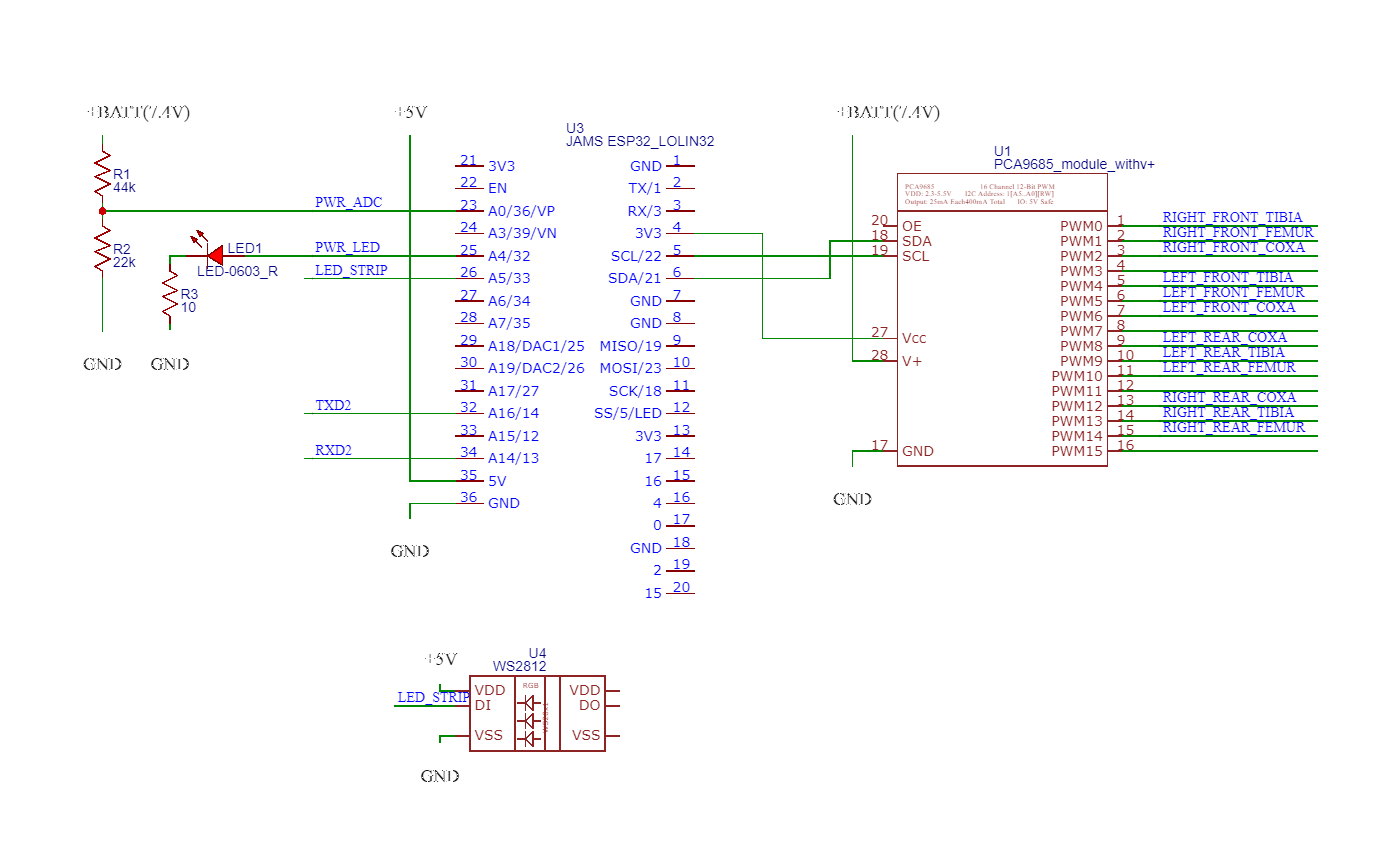
ESP32 QuadRuped 是一个基于 ESP32 微控制器的开源四足机器人项目,支持 SpotMicro 和 Kangal 两种经典结构。项目以 3D 打印件为主体框架,配合 12 个高压舵机(SPT5430HV-180W)实现 12 自由度的运动控制,核心控制器采用 LOLIN32 开发板,并通过 PCA9685 模块驱动舵机群。硬件设计上集成了 IMU 传感器用于姿态平衡、WS2812 RGB LED 作为机器人“眼睛”,以及可选的 2S 锂电池充电模块和 USB-C PD 诱骗电路,整体供电方案支持 7V-28V 宽电压输入。
标签
项目特点
支持 SpotMicro 和 Kangal 两种 3D 打印机器人结构
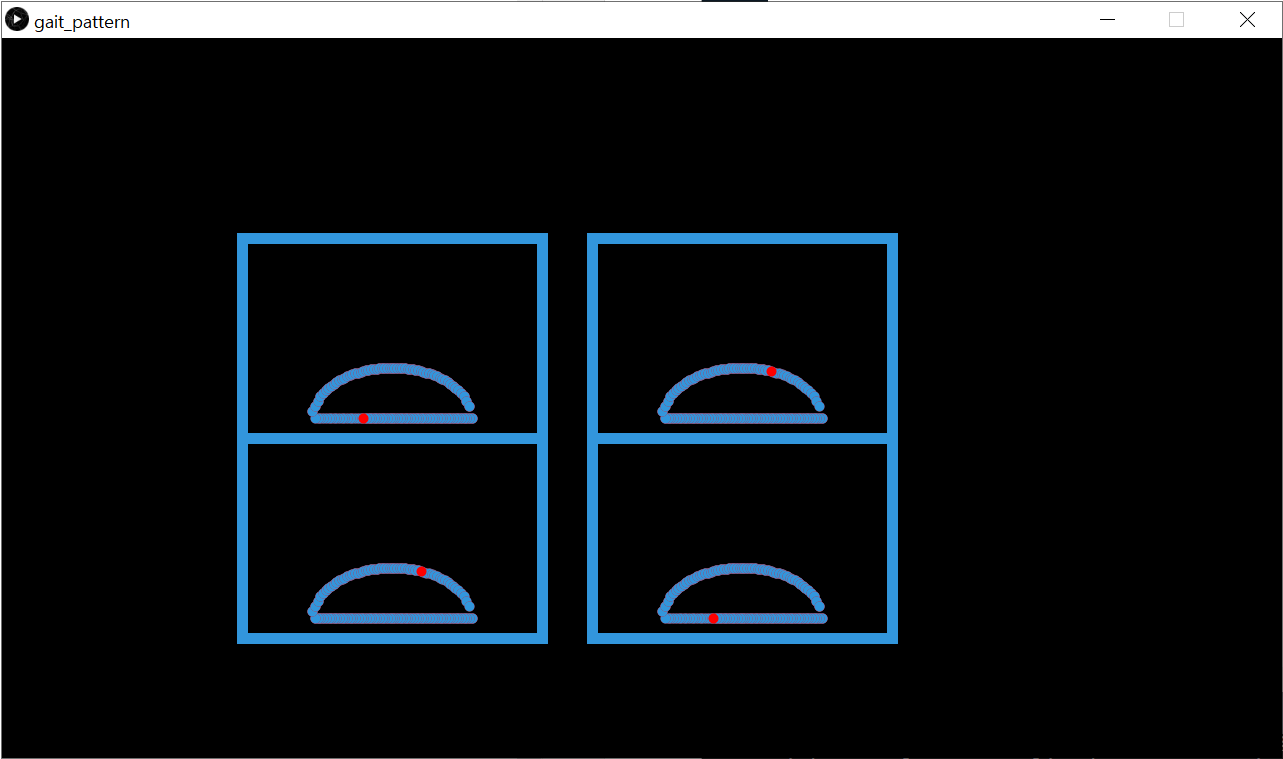
基于 Processing 的步态模式生成器,可自定义步态
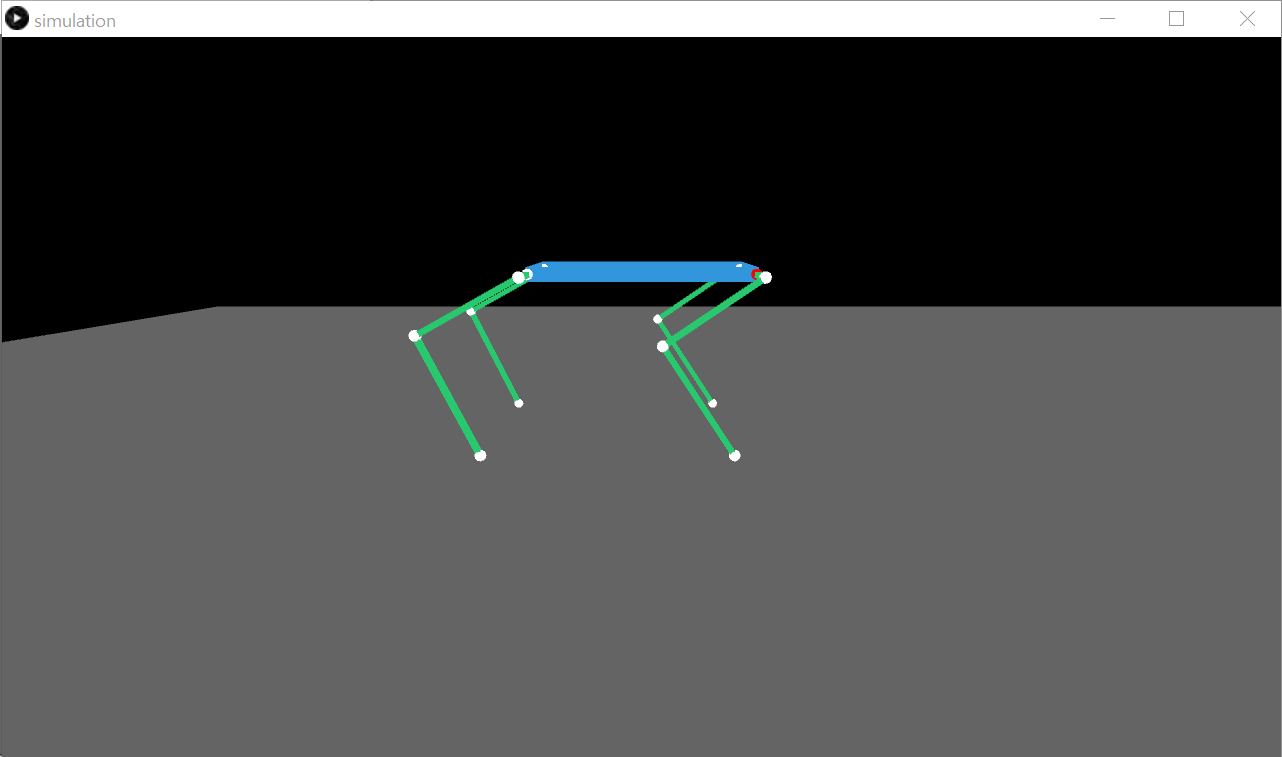
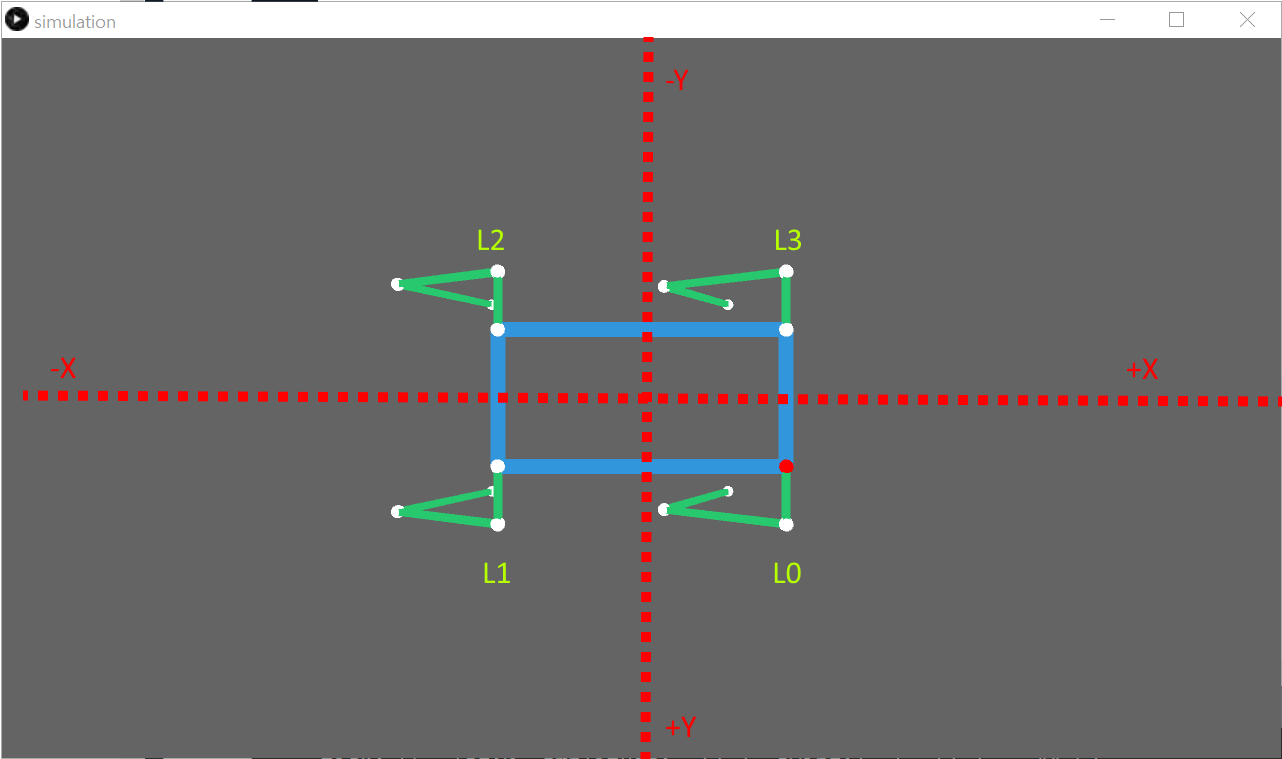
提供 3D 仿真环境,支持键盘控制机器人姿态和行走
集成 IMU 实现机身平衡控制
支持蓝牙低功耗(BLE)手柄、FlyPad 和 GameSirT1D 遥控器
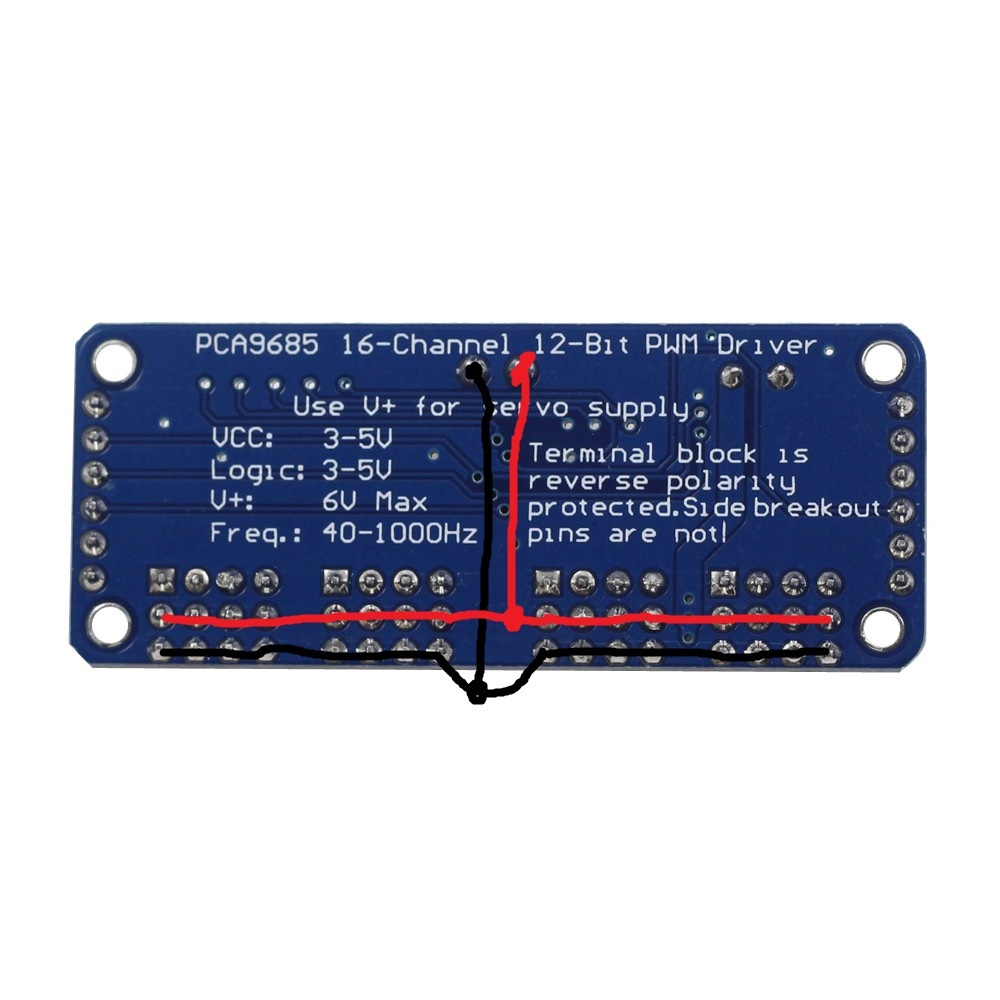
使用 PCA9685 舵机驱动板控制 12 个高压舵机
支持 RGB LED 眼睛显示效果
技术规格
| 主控芯片 | ESP32 LOLIN32 |
|---|---|
| 舵机控制器 | PCA9685 模块 |
| 舵机型号 | SPT5430HV-180W 8.4V 高压舵机 |
| 舵机数量 | 12 个 |
| 自由度 | 12-DOF(每条腿3个自由度) |
| 电源 | 1S3P 18650 锂电池组 × 2 |
| 电压转换 | DC-DC 降压模块(7V-28V 转 5V 3A) |
| 传感器 | IMU(惯性测量单元) |
| 通信方式 | 蓝牙低功耗(BLE) |
| 结构材料 | 3D 打印件 |
| 支持机型 | SpotMicro、Kangal |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| ESP32 LOLIN32 | 1 | — | 核心处理器 |
| PCA9685 模块 | 1 | — | I2C 舵机驱动板 |
| SPT5430HV-180W 8.4V 高压舵机 | 12 | — | 每条腿3个 |
| 1S3P 18650 锂电池组 | 2 | — | 串联供电 |
| DC-DC 降压模块(7V-28V 转 5V 3A) | 1 | — | 为舵机控制板供电 |
| WS2812 RGB LED | 2 | — | 机器人眼睛 |
| 圆形翘板开关(带LED) | 1 | — | 电源开关 |
| HX-2S-JH20 锂电池充电器 | 1 | — | 可选 |
| PDC004-PD 9V 模块 | 1 | — | 可选,用于USB-C供电 |
| STPS2045C 肖特基整流器 | 1 | — | 可选,防反接保护 |
| 锂电池电量指示模块 | 1 | — | 可选 |
能力画像
⚪ 记忆与知识检索: 2/5
🔵 逻辑推演: 3/5
⚪ 表达与交流: 1/5
⚪ 感知与观察: 2/5
🔵 数理与计算: 4/5
🔵 动手与操作: 5/5
🔵 狂热与坚持: 4/5
🔵 创造与创新: 3/5
项目图库
所需技能
🔧 **动手能力**:需要熟练使用3D打印机、焊台和螺丝刀等工具,能够组装复杂的机械结构和焊接电子电路。
💻 **编程能力**:需要掌握Arduino/C++编程(ESP32开发),了解Processing语言用于仿真和步态生成,具备逆运动学(IK)算法基础。
⚡ **电子电路**:需要理解I2C通信(PCA9685)、电源管理(DC-DC降压、锂电池充放电)、蓝牙低功耗(BLE)协议和IMU传感器数据处理。
适用场景
机器人爱好者学习和研究四足机器人运动控制
高校或研究机构的机器人课程实验平台
创客空间的开源机器人项目展示
基于四足机器人的二次开发,如自主导航、视觉识别等