SpotMicroESP32-Leika 四足机器人
SpotMicroESP32-Leika
ESP32, 机器人
2/5
已发布

项目简介
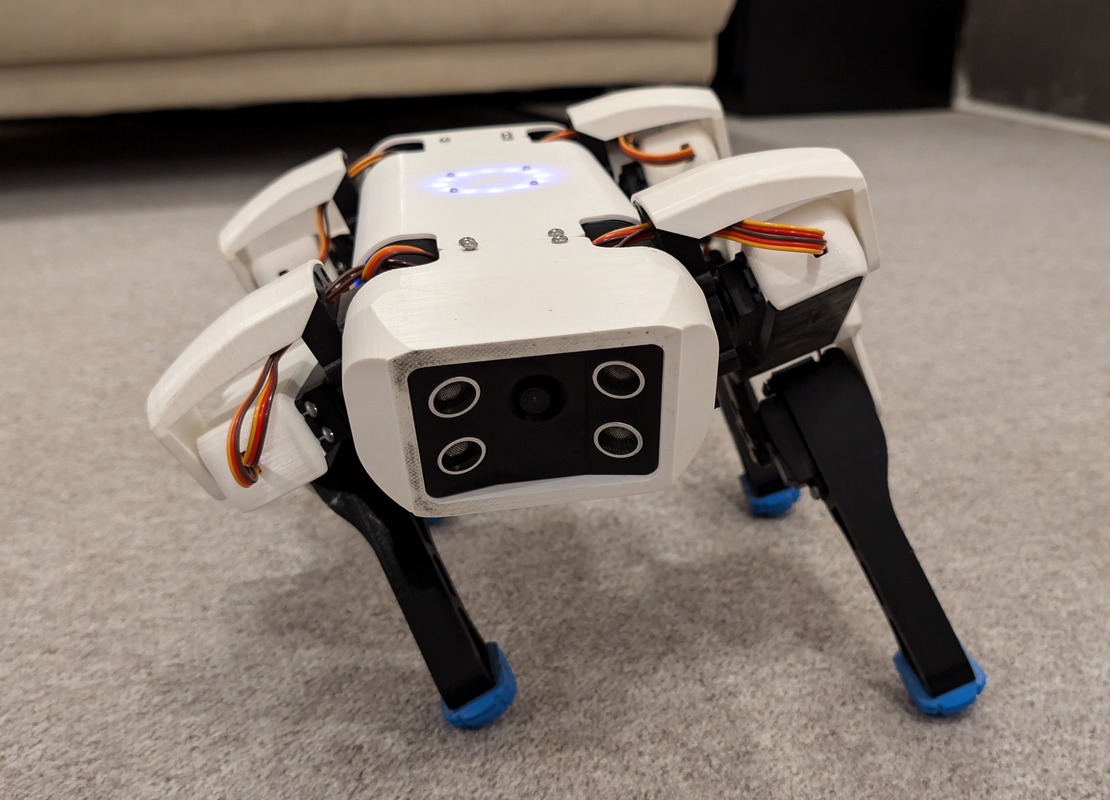
My take on the quadruped Spot Micro robot. Its built around an ESP32 cam microcontroller and utilizes a svelte app to co
Leika 是一个基于 ESP32 的开源四足机器人平台,旨在为机器人爱好者和开发者提供一套完整的软硬件解决方案。该项目将嵌入式固件、网页控制界面和物理仿真环境融为一体,解决了从算法验证到硬件部署的全流程开发难题。其核心控制单元采用 ESP32 微控制器,并借助 FreeRTOS 实时操作系统,高效管理逆运动学计算、步态生成、传感器数据融合和无线通信等多任务并发。
标签
项目特点
**ESP32 控制系统**:基于 ESP32 微控制器,使用 FreeRTOS 实现实时任务管理
**逆运动学**:支持 3-DOF 腿部控制,通过笛卡尔坐标实现直观运动规划
**多种步态实现**:支持 Bezier 小跑步态和 8 相爬行步态
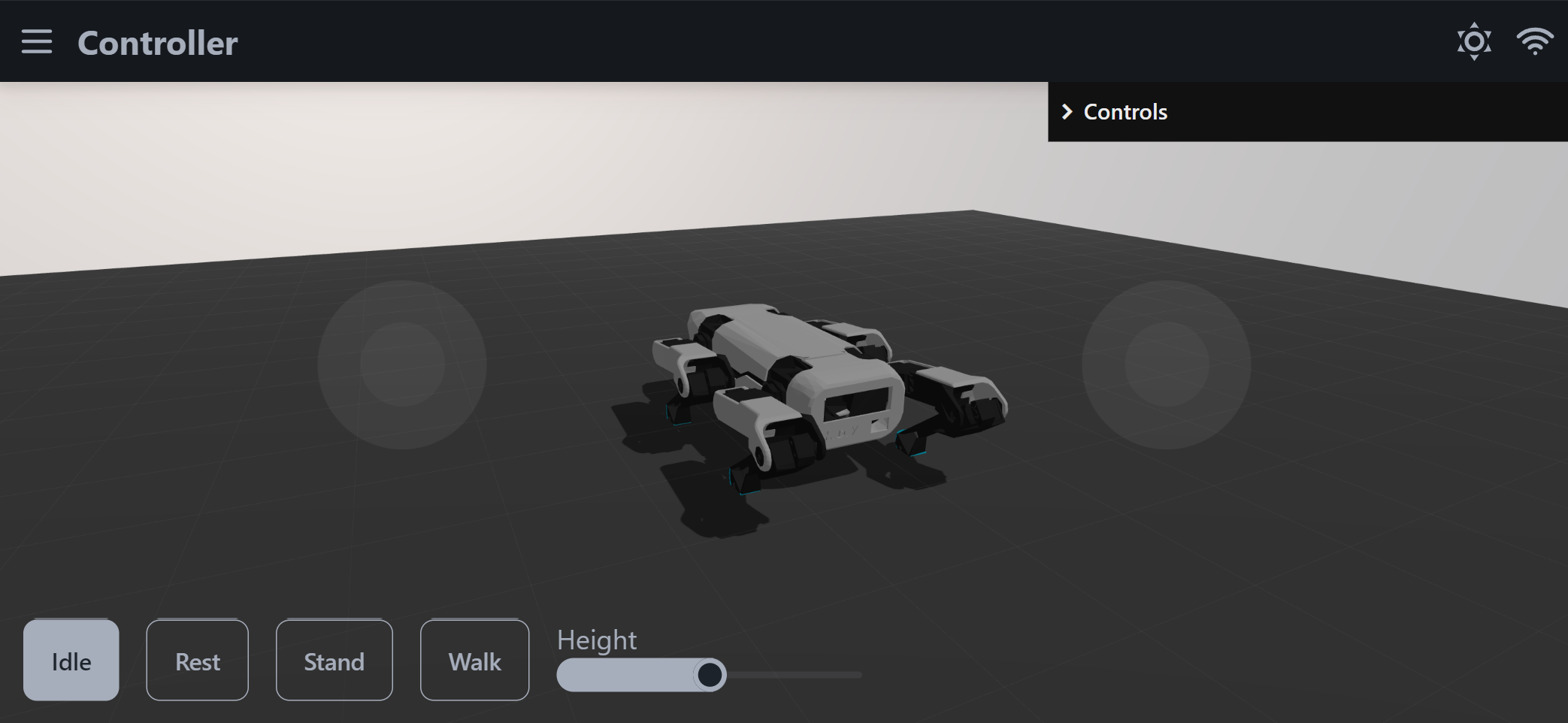
**Web 控制器**:自托管 Web 界面,内嵌于固件中,支持双摇杆控制和实时机器人可视化
**PyBullet 仿真环境**:支持 Gymnasium 接口,可用于强化学习训练(PPO、SAC)
**多种硬件变体**:支持标准 Leika、Yertle 和即将推出的 Leika Mini
**传感器融合**:集成 IMU、磁力计和手势传感器
技术规格
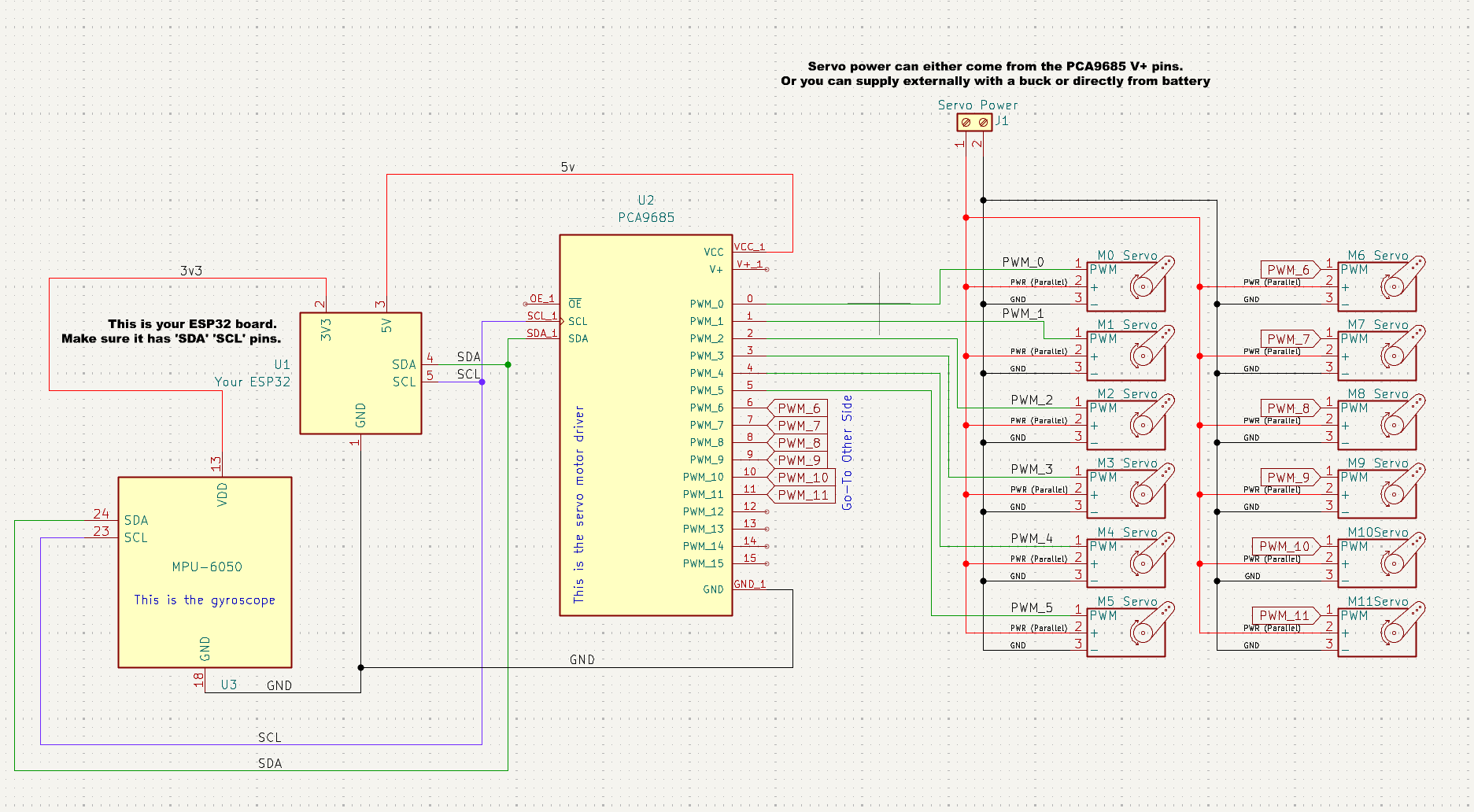
| 微控制器 | ESP32-S3 (N8R8 推荐) |
|---|---|
| 舵机驱动 | PCA9685 16通道 PWM 舵机驱动器 |
| 舵机 | 12x 20-36kg 扭矩舵机(推荐 CLS6336HV) |
| 电源 | 7.6-8.4V 电池(4x 18650 2S2P 或 2S LiPo) |
| 通信 | WiFi(Web 控制器) |
| 固件框架 | PlatformIO + FreeRTOS |
| 控制界面 | SvelteKit Web 应用 |
| 仿真环境 | PyBullet + Gymnasium |
| 步态类型 | Bezier 小跑、8 相爬行、静态/动态姿态 |
| 最大俯仰/横滚角 | ±15° |
| 最大步长 | 腿部伸展范围的 80% |
| 最大步高 | 腿部伸展范围的 50% |
项目资源
搜索资源
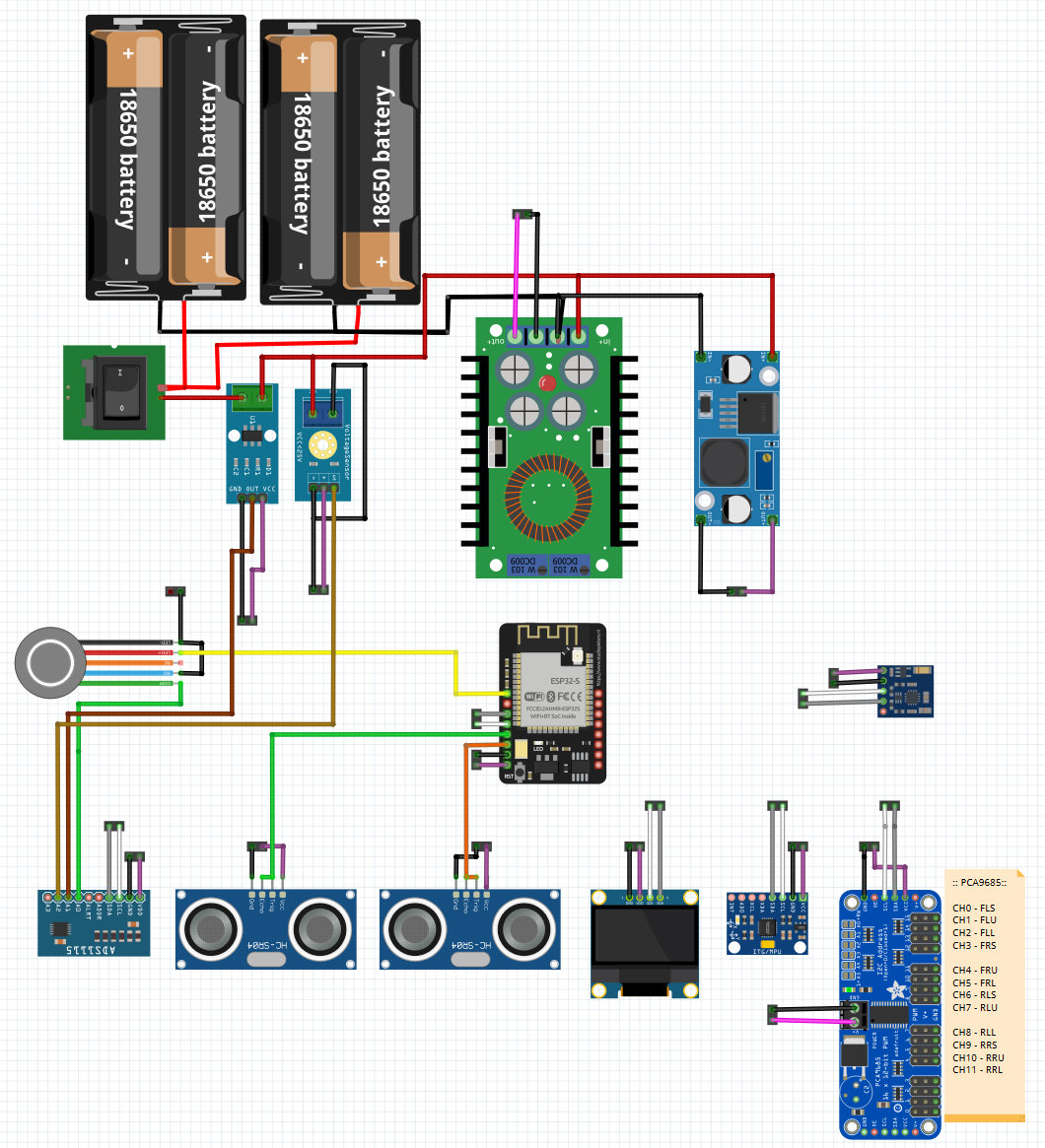
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| ESP32-S3 (N8R8) | 1 | — | 微控制器 |
| PCA9685 舵机驱动板 | 1 | — | 16通道 PWM |
| 舵机 (20-36kg) | 12 | — | 推荐 CLS6336HV |
| LM2596/XL4015 DC-DC 降压模块 | 1 | — | 设置 5V 输出 |
| MPU6050 IMU | 1 | — | 加速度计+陀螺仪 |
| HMC5883 磁力计 | 1 | — | 可选,GY-87/MPU-9250 集成 |
| PAJ7620U2 手势传感器 | 1 | — | 可选 |
| OV2640/OV5640 摄像头 | 1 | — | 可选,120-160° FOV |
| HC-SR04 超声波传感器 | 2 | — | 可选 |
| 0.96" SD1306 OLED 显示屏 | 1 | — | 可选 |
| 电池 (7.6-8.4V) | 1 | — | 4x 18650 2S2P 或 2S LiPo |
| 电源开关 | 1 | — | 额定电流需匹配电池 |
| 3D 打印零件 | 1套 | — | 基于社区设计 |
| 螺丝、螺母、垫片 | 1套 | — | 标准 M3 规格 |
3D 模型
能力画像
⚪ 记忆与知识检索: 2/5
🔵 逻辑推演: 4/5
⚪ 表达与交流: 1/5
⚪ 感知与观察: 3/5
⚪ 数理与计算: 4/5
⚪ 动手与操作: 4/5
⚪ 狂热与坚持: 4/5
⚪ 创造与创新: 3/5
项目图库


所需技能
🔧 **动手能力**:需要熟练使用 3D 打印机、焊接工具和机械组装工具,能够精确组装机器人结构并连接电子元件
💻 **编程能力**:需要掌握 C++(PlatformIO/FreeRTOS)、JavaScript/TypeScript(SvelteKit)和 Python(PyBullet/强化学习),能够开发和调试固件、Web 控制器和仿真环境
⚡ **电子电路**:需要了解 ESP32 微控制器、PWM 舵机驱动、电源管理(DC-DC 降压)、I2C 传感器通信等基础知识
适用场景
**机器人学习与研究**:作为四足机器人开发的完整平台,适合学习逆运动学、步态生成和机器人控制
**强化学习训练**:利用 PyBullet 仿真环境训练和测试 RL 策略,再部署到真实硬件
**嵌入式系统开发**:基于 ESP32 和 FreeRTOS 的实时系统开发实践
**Web 控制界面开发**:使用 Svelte 构建嵌入式 Web 应用,实现远程机器人控制
**创客与教育**:适合高级创客和机器人爱好者构建自己的四足机器人平台