Spot Micro 四足机器人项目
spotMicro
四足/人形机器人
3/5
🧩 软硬件结合
已发布

项目简介
Spot Micro四足机器人项目。
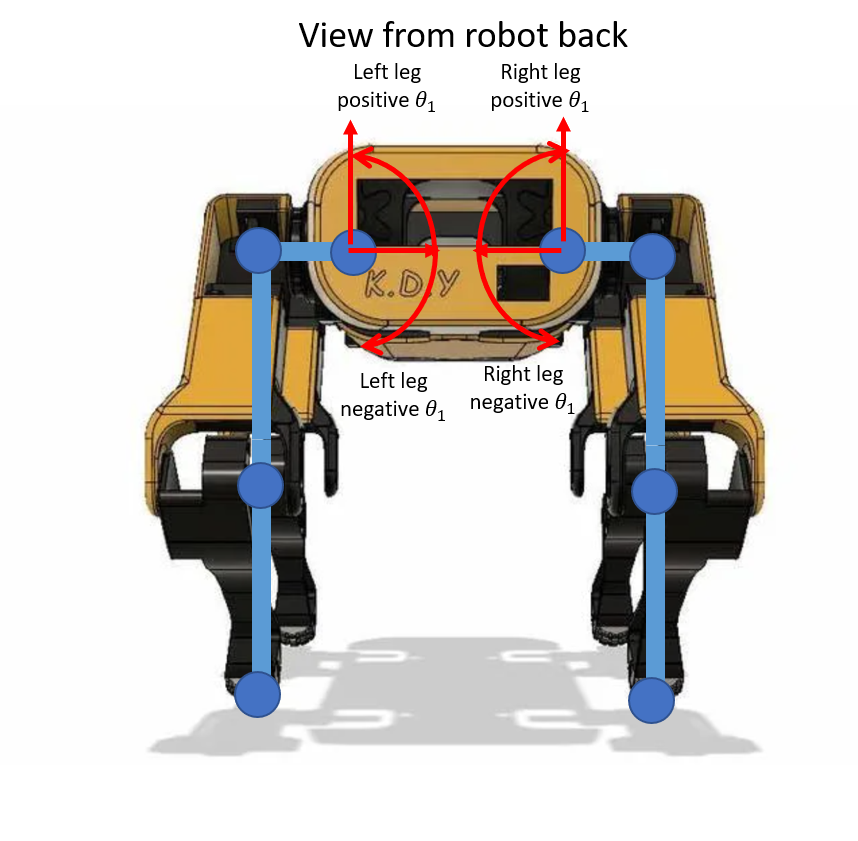
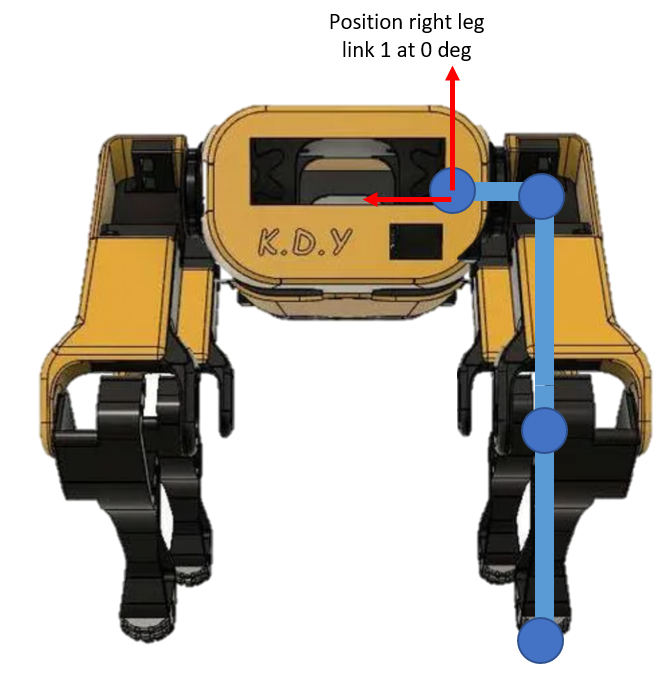
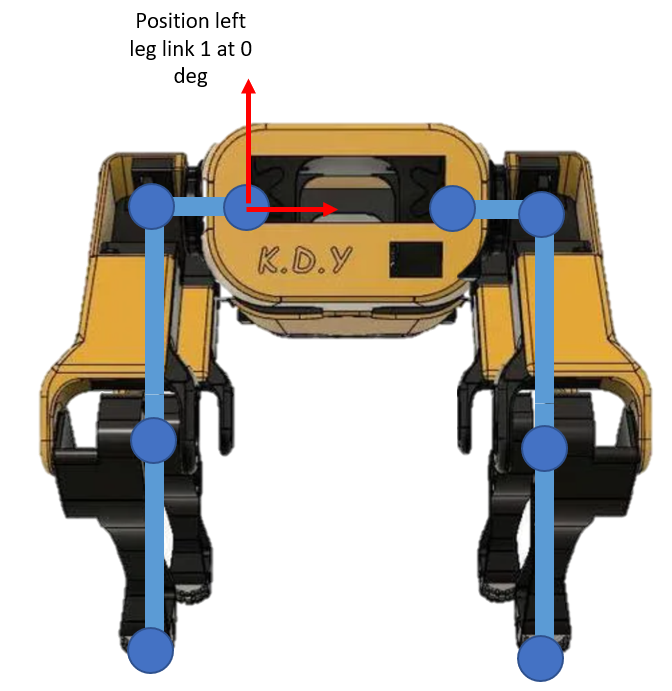
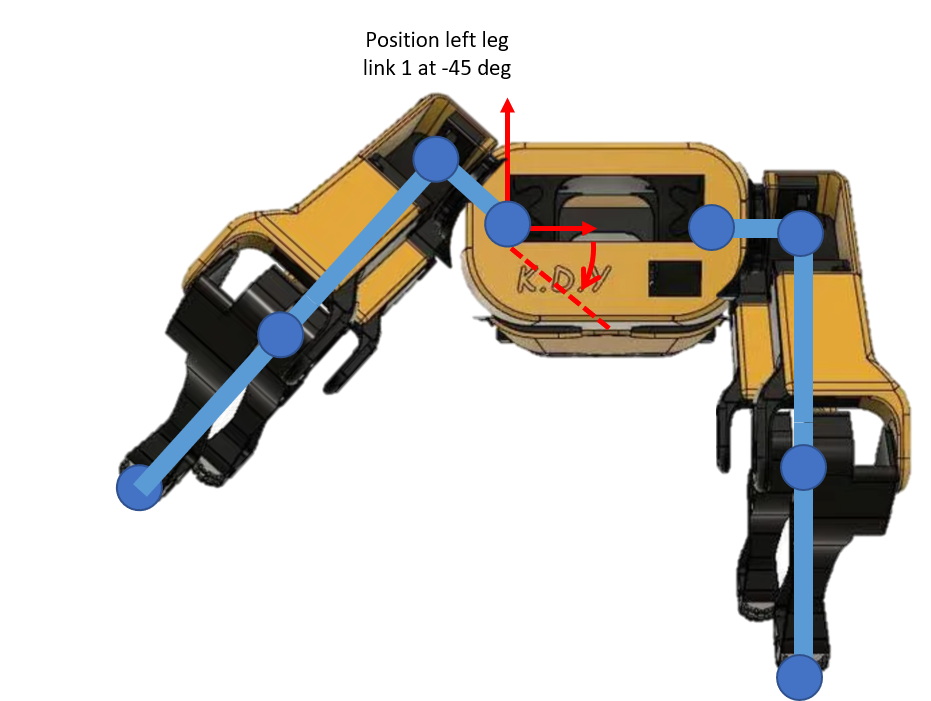
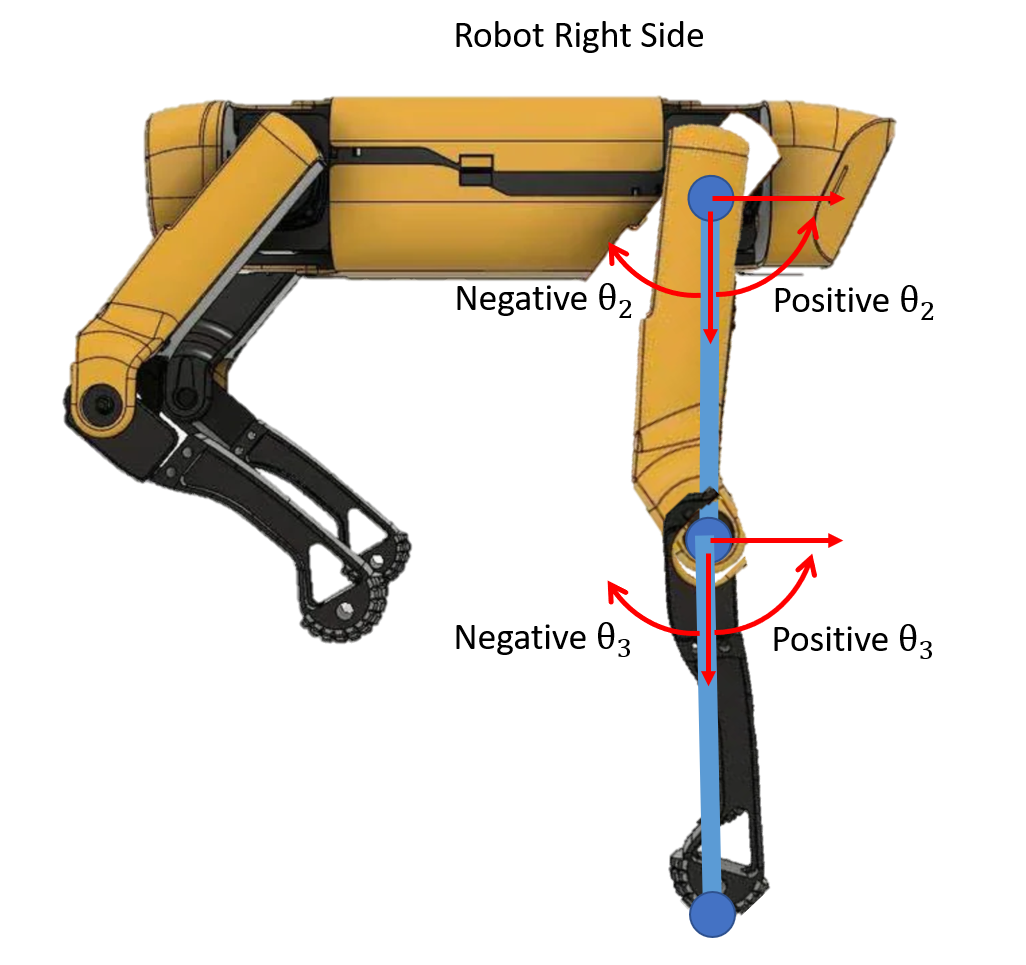
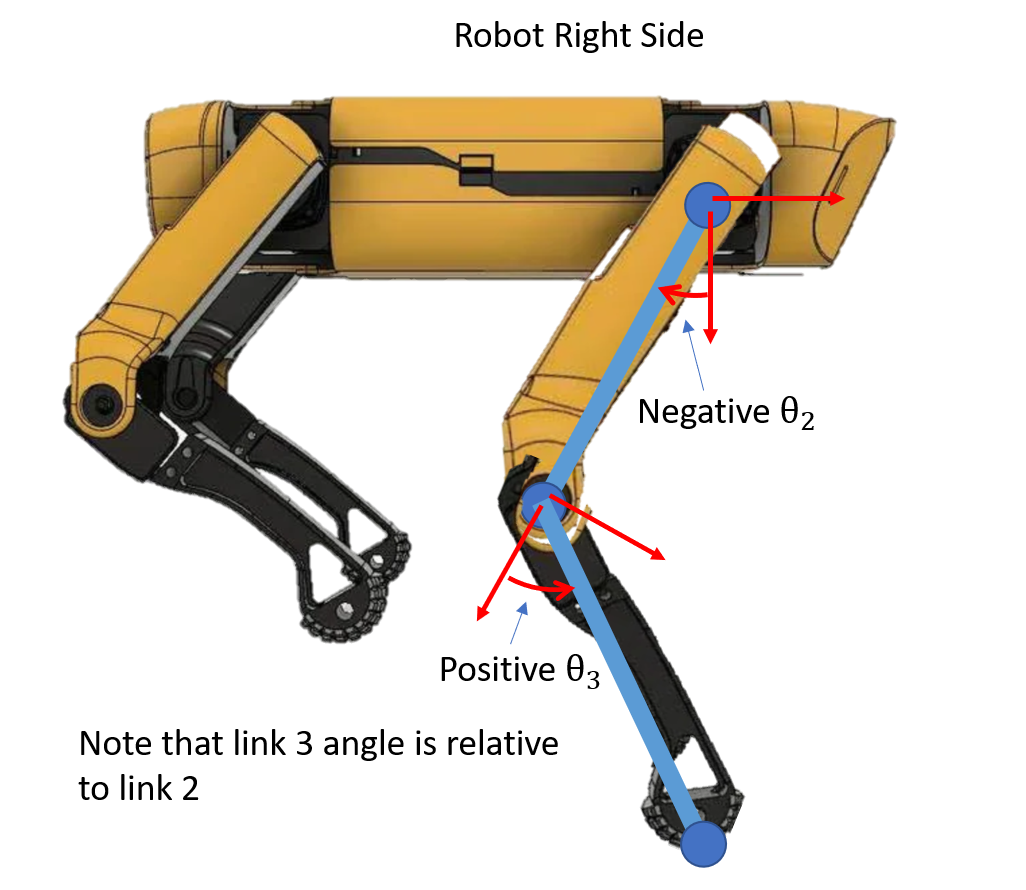
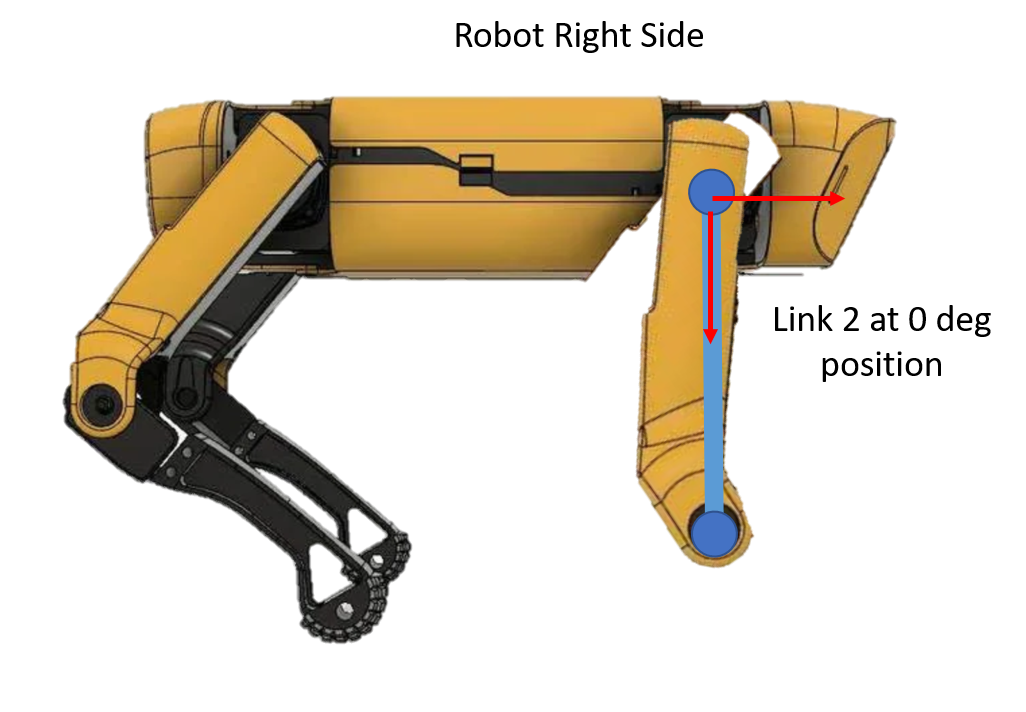
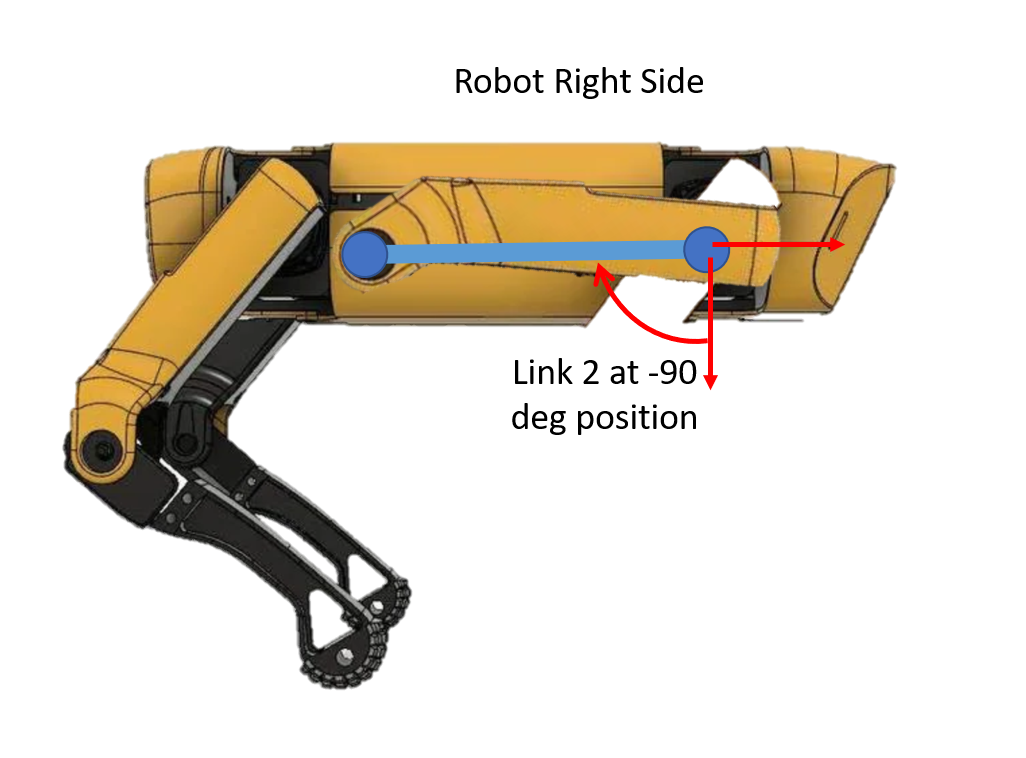
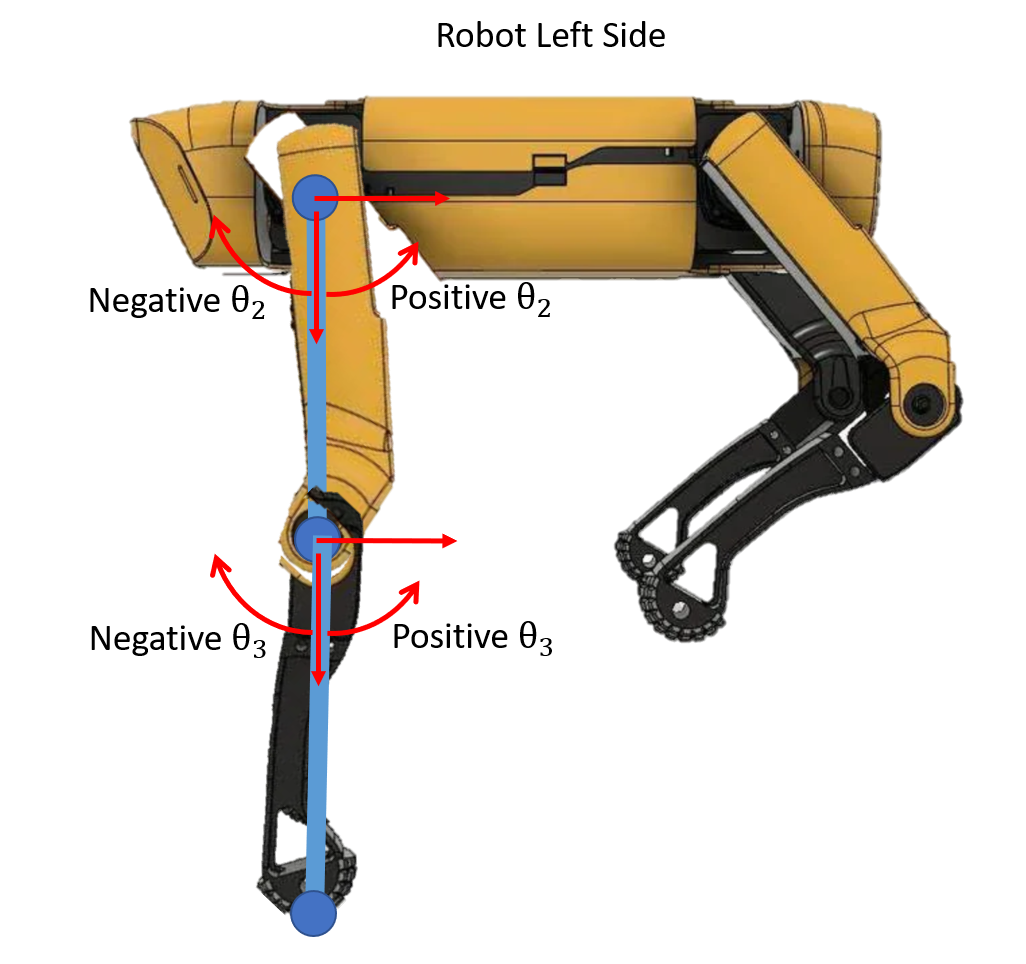
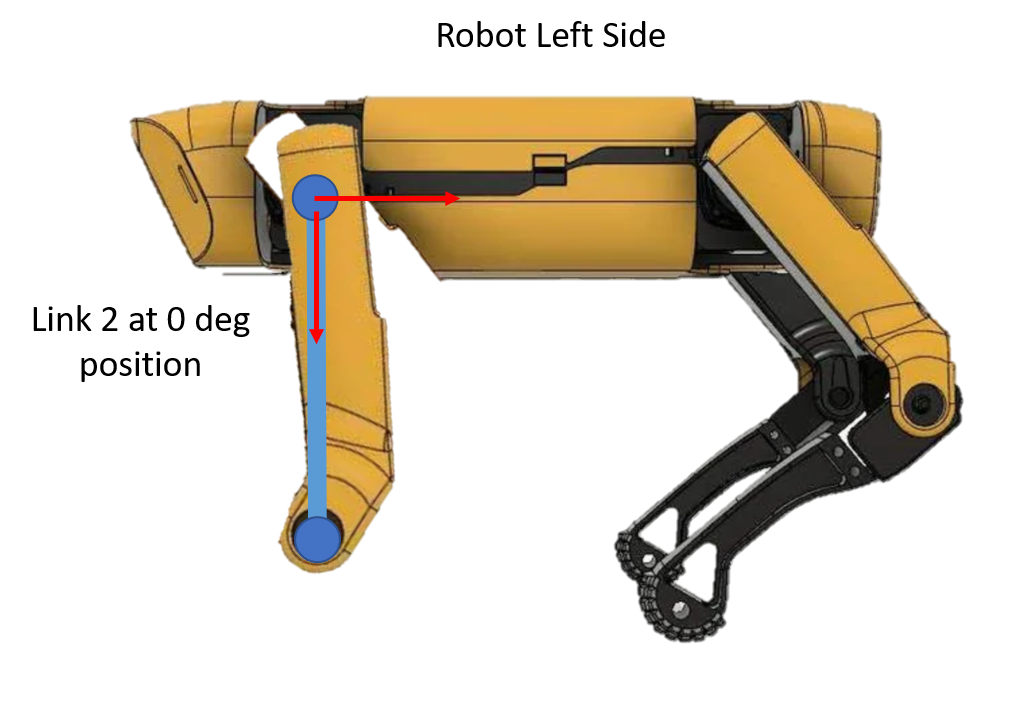
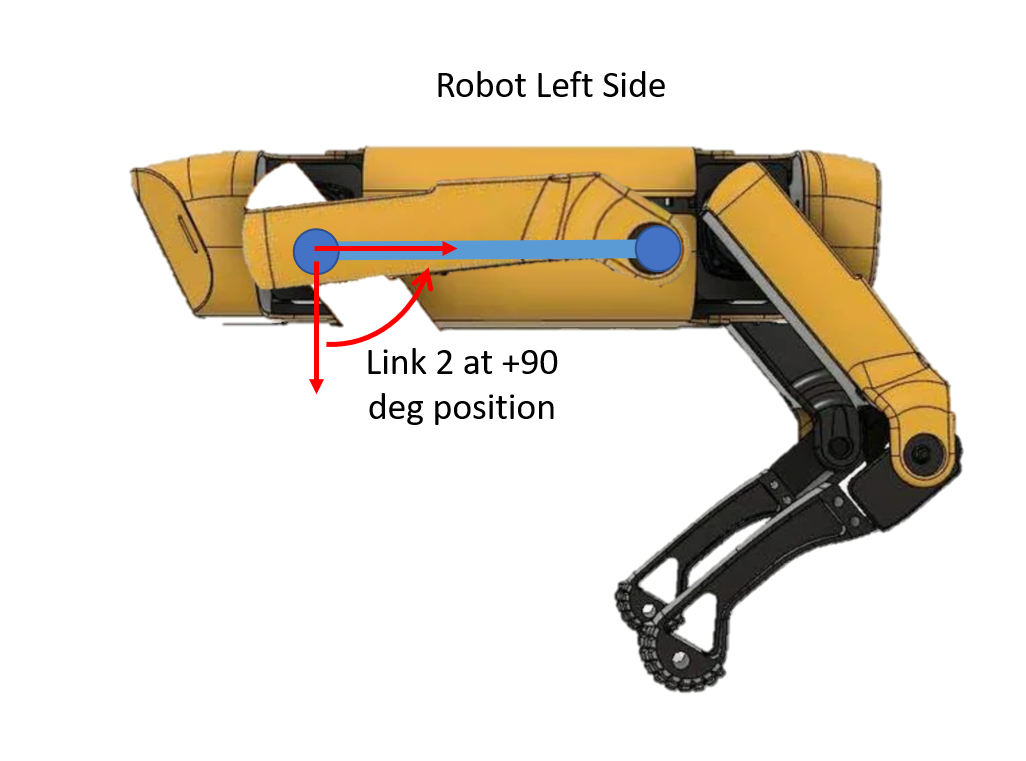
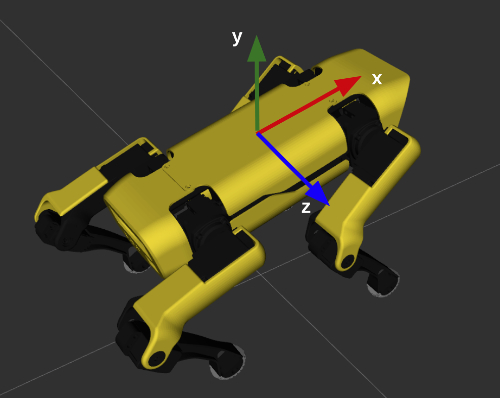
这是一个基于ROS(机器人操作系统)的开源四足机器人项目,旨在为3D打印的Spot Micro仿生狗提供完整的运动控制与感知能力。项目核心代码运行在树莓派3B上,搭载Ubuntu 16.04与ROS Kinetic环境,通过C++和Python混合编程实现机器人的坐、立、转向、行走等基础动作控制。硬件方面,机器人采用KDY0523设计的Thingverse框架,使用12个PDI-HV5523MG舵机驱动四肢,通过PCA9685舵机控制板经I2C总线进行精确控制,并配备RPLidar A1激光雷达实现环境感知。软件架构上,项目以catkin工作空间组织,包含多个功能节点:`spot_micro_motion_cmd`负责运动指令解析与步态生成,`spot_micro_keyboard_cmd`提供键盘遥控接口,同时集成了URDF模型描述、TF2坐标变换发布、里程计计算以及基于Hector SLAM的同步定位与地图构建功能。该项目解决了开源四足机器人从硬件组装到软件控制的完整闭环问题,特别适合机器人爱好者、高校实验室和创客空间用于研究四足运动学、步态规划、SLAM导航等方向。用户只需按照文档配置好树莓派、舵机、激光雷达等硬件,即可通过ROS节点快速实现机器人的遥控行走与自主建图。项目还提供了详细的硬件安装指南、坐标系说明以及自定义3D打印部件的STL文件,降低了复现门槛。未来计划包括加入视觉里程计、强化学习步态优化以及更复杂的导航避障功能。
项目特点
全开源设计:3D打印结构、电路连接、控制代码全部公开
仿生运动:支持行走、小跑、转身、侧移等多种步态
模块化结构:腿部、躯干、头部可独立拆装,便于调试和升级
低成本入门:使用常见舵机和Arduino/Raspberry Pi,总成本可控
社区活跃:GitHub上有大量用户分享的改装方案和优化代码
可扩展性强:支持添加摄像头、激光雷达、机械臂等外设
技术规格
| 尺寸(站立) | |
|---|---|
| 重量 | |
| 自由度 | |
| 舵机型号 | |
| 主控制器 | |
| 协处理器 | |
| 电池 | |
| 续航时间 | |
| 最大移动速度 | |
| 通信方式 |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| 3D打印外壳(PLA) | 1套 | — | 约200g耗材 |
| MG996R 金属齿轮舵机 | 12个 | — | 180度标准舵机 |
| Raspberry Pi 3B+ | 1个 | — | 或更高版本 |
| PCA9685 PWM驱动板 | 1个 | — | I2C接口 |
| 2S 7.4V 2200mAh LiPo电池 | 1个 | — | XT60接头 |
| 5V 3A UBEC降压模块 | 1个 | — | 给Raspberry Pi供电 |
| 杜邦线、排针、螺丝 | 若干 | — | M3规格 |
| MPU6050六轴陀螺仪 | 1个 | — | 姿态检测 |
| USB Wi-Fi网卡 | 1个 | — | 可选,树莓派自带Wi-Fi则不需要 |
3D 模型
能力画像
**记忆与知识检索**:3/5 — 需要查阅舵机参数、电路接线和步态算法文档
**动手与操作**:4/5 — 涉及3D打印、焊接、螺丝组装和机械调试
**编程与算法**:4/5 — 需要编写Python控制代码,理解逆运动学算法
**设计与建模**:3/5 — 可修改3D打印文件,调整结构尺寸
**实验与调试**:4/5 — 需要反复调试舵机角度、步态参数和重心平衡
**协作与分享**:3/5 — 社区有大量改装案例,可提交PR贡献代码
**学习与研究**:4/5 — 涉及机器人学、控制理论、嵌入式系统等多学科
**系统集成**:4/5 — 需要整合机械、电子、软件三个子系统
项目图库








所需技能
基础电子知识(电路连接、电源管理)
3D打印操作(切片、打印、后处理)
焊接和万用表使用
Python编程基础
Linux系统基础操作(Raspberry Pi环境)
机械组装和调试能力
理解基本运动学和PID控制概念
故障排查和问题解决能力
适用场景
机器人爱好者入门四足机器人开发
高校机器人课程教学实践项目
创客空间和Fab Lab的展示与教学
仿生机器人算法研究(步态、平衡、导航)
家庭娱乐和STEM教育
小型机器人竞赛和黑客马拉松
作为ROS(机器人操作系统)学习平台