CHAMP四足机器人控制器
champ
机器人
3/5
🧩 软硬件结合
已发布
项目简介
MIT Cheetah I Implementation
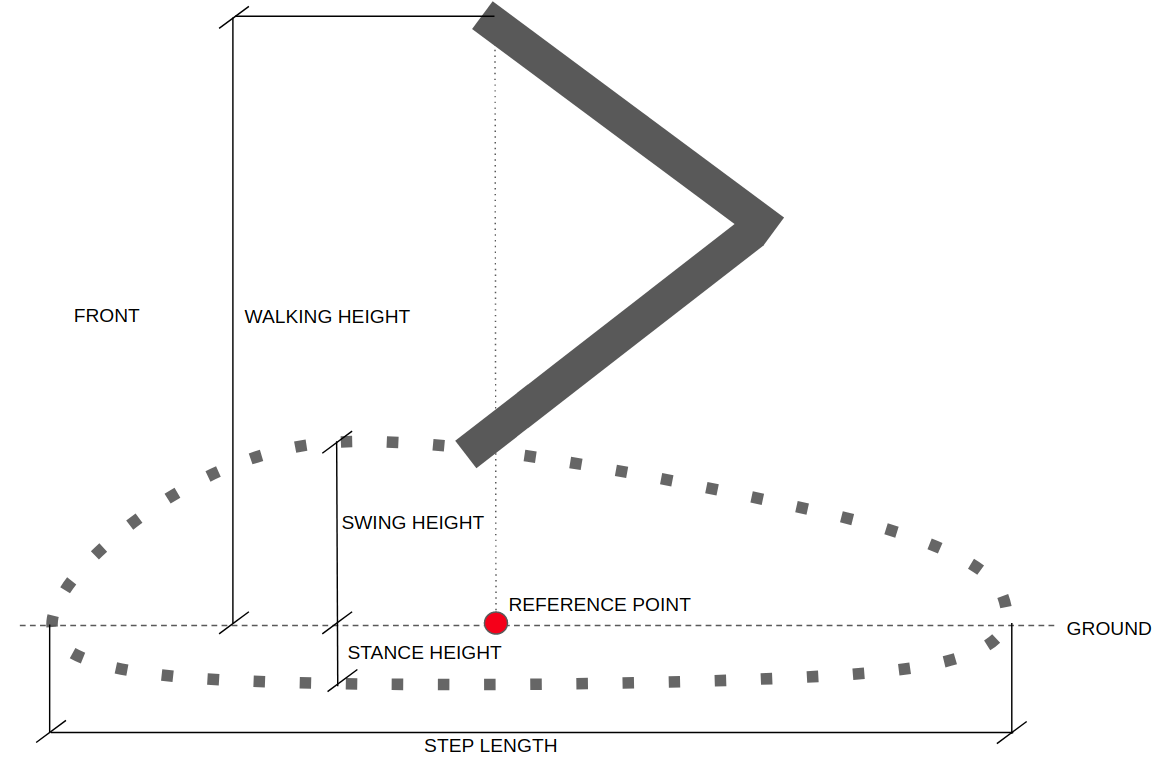
CHAMP是一个专为四足机器人开发设计的开源框架,旨在帮助研究者和爱好者快速构建新机器人并开发控制算法。该项目基于MIT Cheetah机器人论文中的分层控制理论,实现了高度动态运动控制,核心在于模式调制与阻抗控制的结合。CHAMP完全兼容ROS导航栈,支持自主导航、SLAM建图以及Gazebo仿真环境,用户无需实体机器人即可在RVIZ中运行行走演示。
标签
项目特点
**完全自主导航**:基于 ROS Navigation Stack 实现 SLAM 建图和自主导航。
**配置助手工具**:提供 [champ_setup_assistant](https://github.com/chvmp/champ_setup_assistant) 快速配置新机器人。
**预配置机器人模型**:包含 Anymal、MIT Mini Cheetah、Spot、LittleDog 等 URDF 模型。
**Gazebo 仿真环境**:支持在 Gazebo 中进行仿真测试和算法验证。
**兼容 DIY 项目**:与 SpotMicroAI、OpenQuadruped 等开源四足项目兼容。
**轻量级 C++ 库**:提供 [libchamp](https://github.com/chvmp/libchamp) 头文件库,可在 SBC 和微控制器上运行。
**演示应用**:集成 TOWR 运动规划、chicken head 稳定控制等演示。
技术规格
| 操作系统 | Ubuntu 16.04 (ROS Kinetic) / Ubuntu 18.04 (ROS Melodic) |
|---|---|
| 框架 | ROS (Robot Operating System) |
| 控制器架构 | 分层控制器(基于 MIT Cheetah 论文) |
| 仿真环境 | Gazebo |
| 导航栈 | ROS Navigation Stack (move_base, amcl, gmapping) |
| 轻量级版本 | 支持 Teensy 系列微控制器运行 |
| 编程语言 | C++ (ROS 节点) |
| 许可证 | MIT |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| 运行 ROS 的 SBC(如 Raspberry Pi、Jetson Nano) | 1 | — | 运行主控制器 |
| Teensy 系列开发板 | 1 | — | 可选,用于轻量级版本 |
| 12 个伺服电机或无刷电机 | 12 | — | 每条腿 3 个 |
| IMU 模块 | 1 | — | 姿态估计 |
| 激光雷达或深度相机 | 1 | — | 用于 SLAM 和导航 |
| 锂电池组 | 1 | — | 根据电机功率选择 |
| 3D 打印或 CNC 加工的外壳和腿部件 | 1套 | — | 根据机器人设计 |
| 游戏手柄(如 Logitech F710) | 1 | — | 可选,用于遥操作 |
3D 模型
能力画像
⚪ 记忆与知识检索: 2/5
🔵 逻辑推演: 4/5
⚪ 表达与交流: 1/5
⚪ 感知与观察: 3/5
⚪ 数理与计算: 4/5
⚪ 动手与操作: 5/5
⚪ 狂热与坚持: 4/5
⚪ 创造与创新: 3/5
项目图库



所需技能
🔧 **动手能力**:需要组装四足机器人机械结构,包括 3D 打印件、电机安装、布线等。建议具备基本的机械装配和电子焊接经验。
💻 **编程能力**:需要熟悉 ROS 框架、C++ 编程和 Linux 命令行操作。能够编译 ROS 工作空间、配置 launch 文件和参数文件。
⚡ **电子电路**:需要了解电机驱动、微控制器编程(如 Teensy)、传感器接口(IMU、激光雷达)等基础知识。能够调试硬件接口和电源管理。
适用场景
**四足机器人研究与开发**:作为学术研究平台,验证新的运动控制算法和步态规划方法。
**机器人教育**:用于高校机器人课程的教学实践,让学生了解四足机器人控制原理。
**自主巡检机器人**:结合 SLAM 和导航功能,开发用于室内巡检、环境监测的自主移动机器人。
**DIY 机器人爱好者**:为开源四足机器人项目(如 SpotMicroAI)提供成熟的软件控制框架。
**仿真与算法验证**:在 Gazebo 仿真环境中测试控制算法,无需物理硬件即可进行开发。