搜索 "机器人" 找到 165 个结果
Poppy Humanoid是开源3D打印人形机器人,专为研究与教育优化。
Home Assistant integration for Dreame robot vacuums with map support
开源双臂移动机器人,带电动升降功能。
用于移动机器人实时策略研究的开源软件栈。
🤖 基于 saucenao / ascii2d / whatanime 的搜图机器人
v1 of Asimov, an open-source humanoid robot
The Swiss Army Knife of Offline AI. Chat, Speak, and Generate Images - Privacy First, Zero Internet. Download an LLM and
3D-printed open-source humanoid robot platform for sim-to-real and RL
3D打印开源人形机器人平台,用于sim-to-real和RL。
hector_slam 提供ROS包,用于非结构化环境(如Ur)中的SLAM。
slam_gmapping:基于ROS的激光SLAM建图包。
ToddlerBot开源双足机器人,仿幼儿步态学习,Python控制栈。
宇树科技开源双足机器人,全3D打印,11个8010电机,RPi 4B主控,模块化设计。
开源表情机器人灯
An open source framework for creating a bipedal modular companion robot.
An open-source 3D-printed quadrupedal robot. Intuitive gait generation through 12-DOF Bezier Curves. Full 6-axis body po
Meta项目,整合所有OpenROV软件项目。
开源平台,用于ROV、USV及机器人系统的操作、开发与扩展。
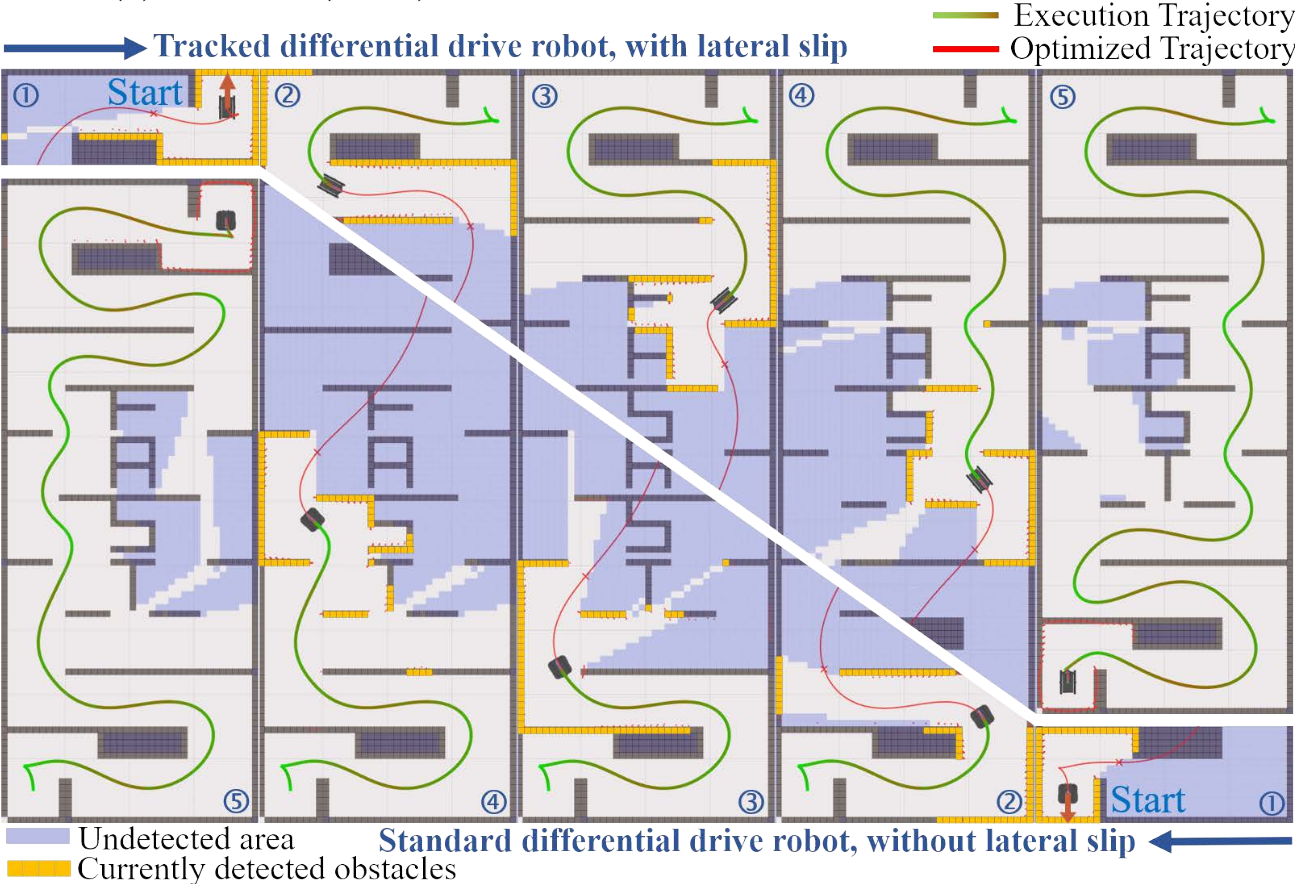
差动驱动机器人类通用轨迹优化框架。
MIT mini cheetah四足机器人在pybullet环境用ros模拟。