DDR-opt 差速驱动轨迹优化框架
DDR-opt
四足/人形机器人
1/5
🧩 软硬件结合
已发布
项目简介
差动驱动机器人类通用轨迹优化框架。
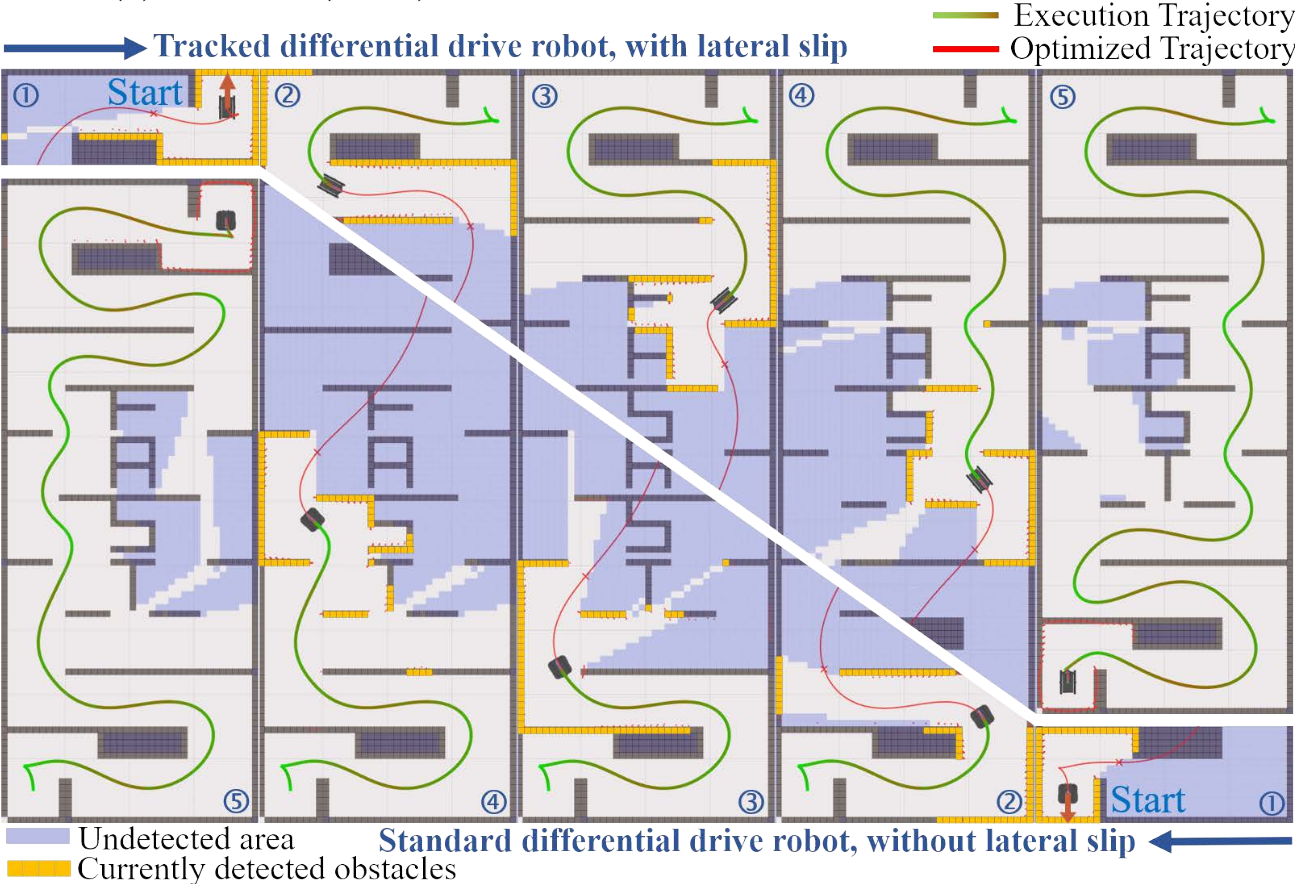
DDR-opt是一个面向差速驱动机器人(Differential Drive Robot)的通用轨迹优化框架,由浙江大学FAST-Lab团队开发,相关论文已发表于IEEE T-ASE期刊。该框架的核心价值在于为轮式移动机器人提供了一套统一的运动规划解决方案,能够处理从轮速控制到线速度/角速度控制等多种控制模式下的轨迹优化问题。
项目特点
**通用性**:适用于所有差速驱动机器人,不依赖特定硬件平台。
**双控制模式**:支持轮速控制(NMPC)和线速度-角速度控制两种模式。
**未知空间规划**:支持在未知环境中进行实时轨迹规划。
**基于 OSQP 求解**:使用 OSQP 和 OSQP-Eigen 作为底层优化求解器,参数调整方便。
**ROS 集成**:基于 ROS 框架,易于集成到现有机器人系统中。
技术规格
| 支持系统 | Ubuntu 18.04 / 20.04 (with ROS) |
|---|---|
| 依赖框架 | ROS (Melodic/Noetic) |
| 优化求解器 | OSQP v0.6.3 + OSQP-Eigen v0.8.1 |
| 控制模式 | 轮速控制 / 线速度-角速度控制 |
| 规划能力 | 已知空间 / 未知空间 |
| 论文发表 | IEEE Transactions on Automation Science and Engineering (T-ASE) |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| Ubuntu 18.04/20.04 | 1 | — | 操作系统 |
| ROS Melodic/Noetic | 1 | — | 机器人操作系统 |
| OSQP v0.6.3 | 1 | — | 优化求解器 |
| OSQP-Eigen v0.8.1 | 1 | — | Eigen 接口的 OSQP |
| 差速驱动机器人 | 1 | — | 测试平台(用户自备) |
能力画像
⚪ 记忆与知识检索: 1/5
🔵 逻辑推演: 4/5
⚪ 表达与交流: 1/5
⚪ 感知与观察: 2/5
🔵 数理与计算: 5/5
🔵 动手与操作: 3/5
⚪ 狂热与坚持: 3/5
🔵 创造与创新: 4/5
项目图库


所需技能
🔧 **动手能力**:需要能够搭建和配置差速驱动机器人硬件平台,进行 ROS 环境部署。
💻 **编程能力**:需要 C++ 编程基础,熟悉 ROS 框架和 catkin 构建系统,了解优化求解器(OSQP)的使用。
⚡ **电子电路**:需要了解差速驱动机器人的电机控制和传感器接口。
适用场景
差速驱动移动机器人的运动规划与轨迹优化
未知环境下的自主导航与避障
机器人竞赛或科研项目中需要高性能轨迹规划的场合
教学和研究中用于验证轨迹优化算法的平台