BlueOS
BlueOS
无人机、智能家居
1/5
🧩 软硬件结合
已发布
项目简介
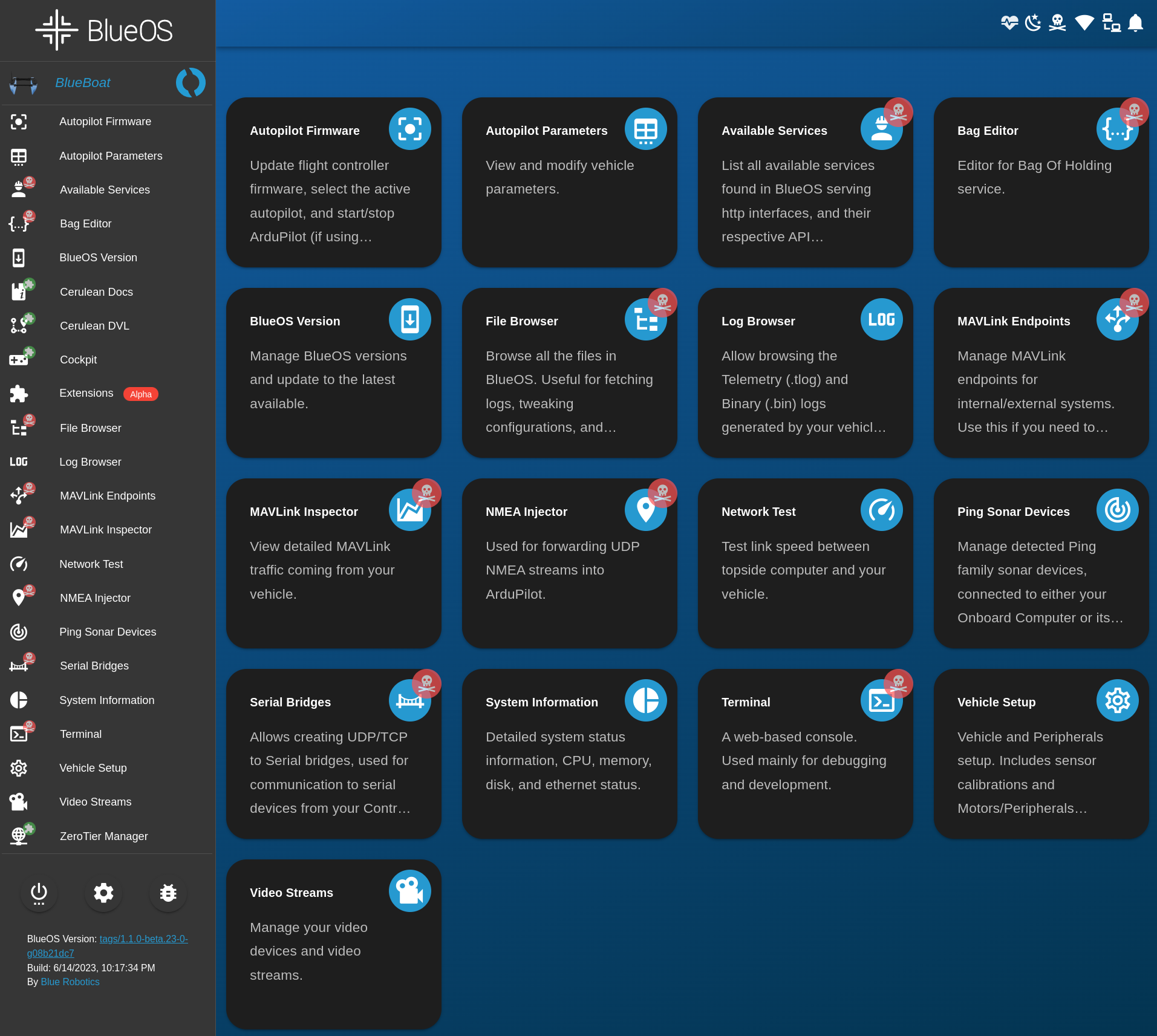
开源平台,用于ROV、USV及机器人系统的操作、开发与扩展。
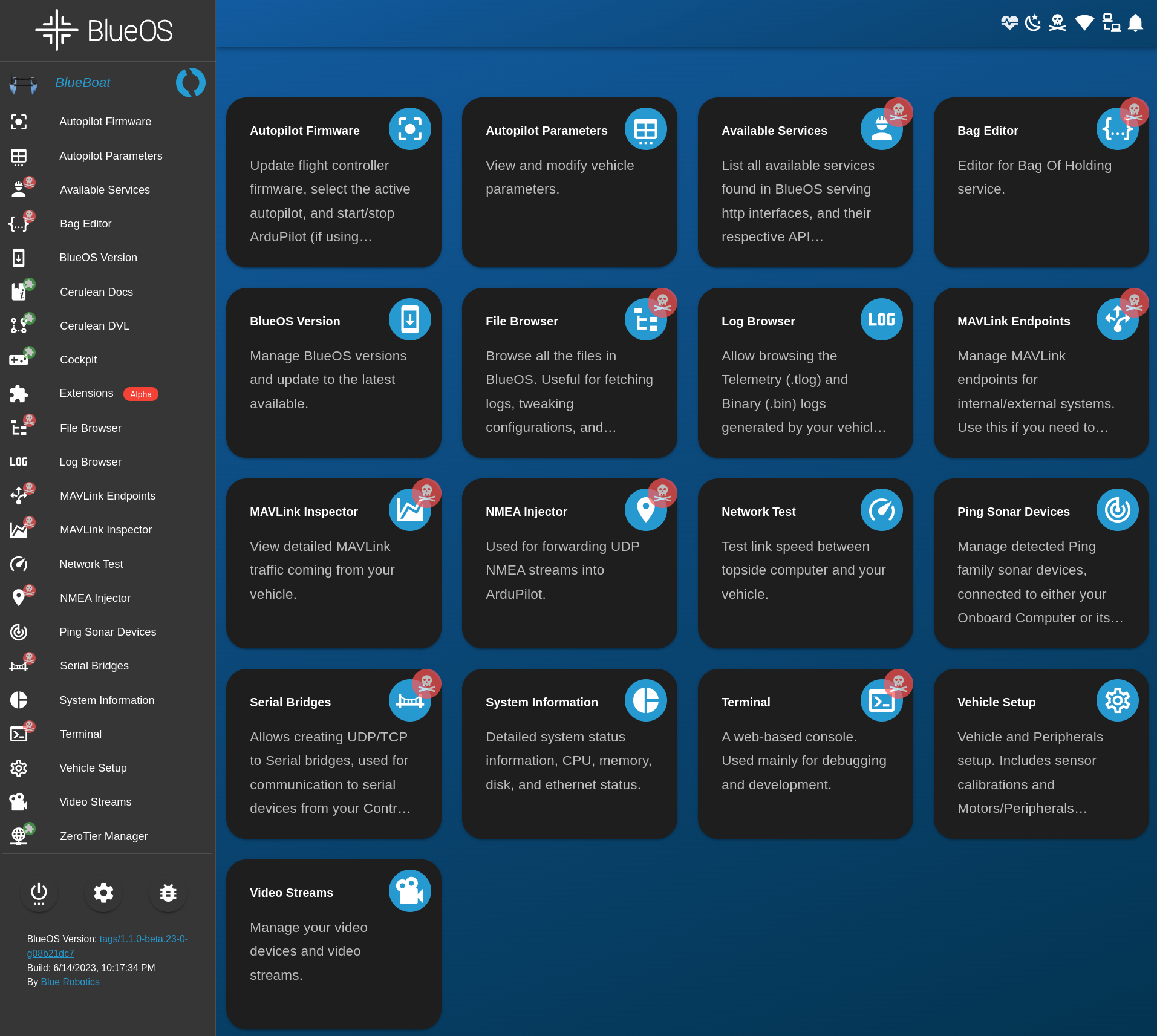
BlueOS 是由 Blue Robotics 团队打造的一款专为无人船、水下机器人等无人系统设计的开源操作系统。它从早期的 Companion 项目演进而来,旨在解决传统机载计算机在视频流传输、通信路由以及系统扩展性方面的瓶颈。BlueOS 采用高度模块化的架构,让开发者能够像搭积木一样灵活地添加或替换功能,从而显著提升了系统的可移植性、可维护性和更新效率。
标签
项目特点
**简单但强大**:界面默认简洁,但用户可以自定义任何内容,实现完全定制化体验。
**聚焦核心**:通过人性化的 UI/UX 设计,改善用户对信息和控制的访问。
**简化复杂任务**:基于 Material UI 设计指南,复用其他应用的设计模式,提升易用性。
**高级错误处理**:清晰的错误检测和提示,帮助用户和开发者快速定位并解决问题。
**简化开发**:提供完整的服务 API 和模块化开发模型,方便开发者扩展功能。
**可移植且灵活**:支持在 Raspberry Pi 3/4/5 或任何运行 Linux 的 SBC 上运行。
**低 CPU 占用**:整个系统设计为高效运行,功能强大但资源消耗低。
**坚实基础**:关键部分或密集型服务使用最先进的语言和特性开发,确保稳定性。
技术规格
| 支持平台 | Raspberry Pi 3/4/5 及任何运行 Linux 的 SBC |
|---|---|
| 支持车辆类型 | 船只 (ArduRover)、潜艇 (ArduSub)、通用 ArduPilot/PX4 车辆 |
| 发布类型 | Stablehttps://raw.githubusercontent.com/bluerobotics/BlueOS/main/CoC.md)、Master(开发版) |
| 部署方式 | Docker Compose 或 Docker Run |
| 用户界面 | 基于 Web 的仪表板,遵循 Material UI 设计规范 |
| 扩展机制 | 通过 Docker 容器或服务 API 进行模块化扩展 |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| 机载计算机 (如 Raspberry Pi 4/5) | 1 | — | 建议 4GB+ RAM |
| 控制站计算机 | 1 | — | 运行浏览器访问 Web UI |
| 自动驾驶仪 (如 Pixhawk) | 1 | — | 可选,用于车辆控制 |
| 网络设备 (路由器/交换机) | 1 | — | 用于连接机载计算机和控制站 |
| Docker | 1 | — | 运行 BlueOS 容器 |
| Linux 操作系统 (Debian/Ubuntu) | 1 | — | 推荐基于 Debian 的发行版 |
3D 模型
能力画像
⚪ 记忆与知识检索: 2/5
🔵 逻辑推演: 3/5
⚪ 表达与交流: 2/5
⚪ 感知与观察: 2/5
⚪ 数理与计算: 3/5
🔵 动手与操作: 4/5
⚪ 狂热与坚持: 3/5
⚪ 创造与创新: 4/5
项目图库


所需技能
🔧 **动手能力**:需要能够组装和配置硬件,包括机载计算机、自动驾驶仪和网络设备。
💻 **编程能力**:需要基本的 Linux 命令行操作能力,以及 Docker 使用经验。了解 Python 或 Shell 脚本有助于自定义扩展。
⚡ **电子电路**:需要了解基本的电子连接,如串口、I2C 等,用于连接自动驾驶仪和传感器。
适用场景
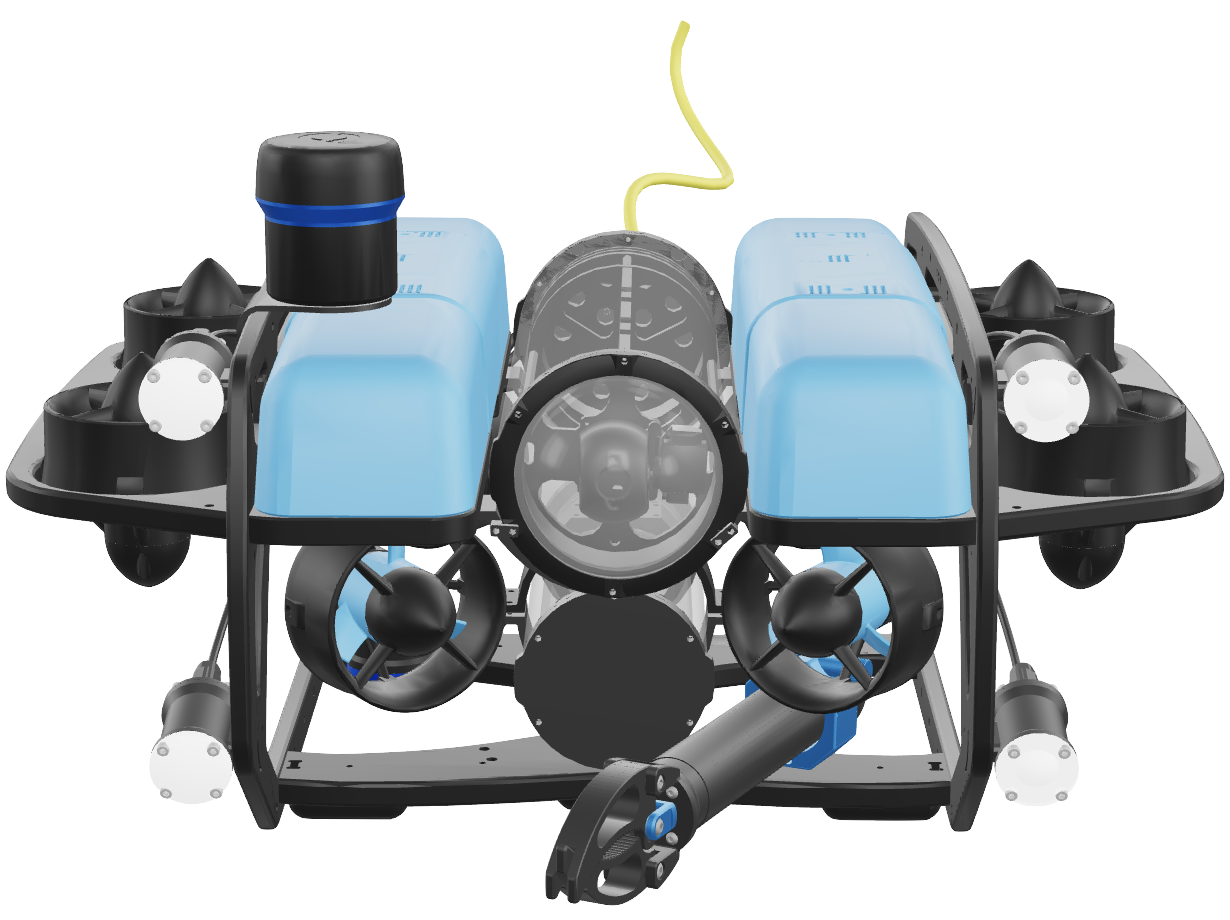
**水下机器人 (ROV) 操作**:使用 BlueROV2 等硬件进行水下探索、检查和科研任务。
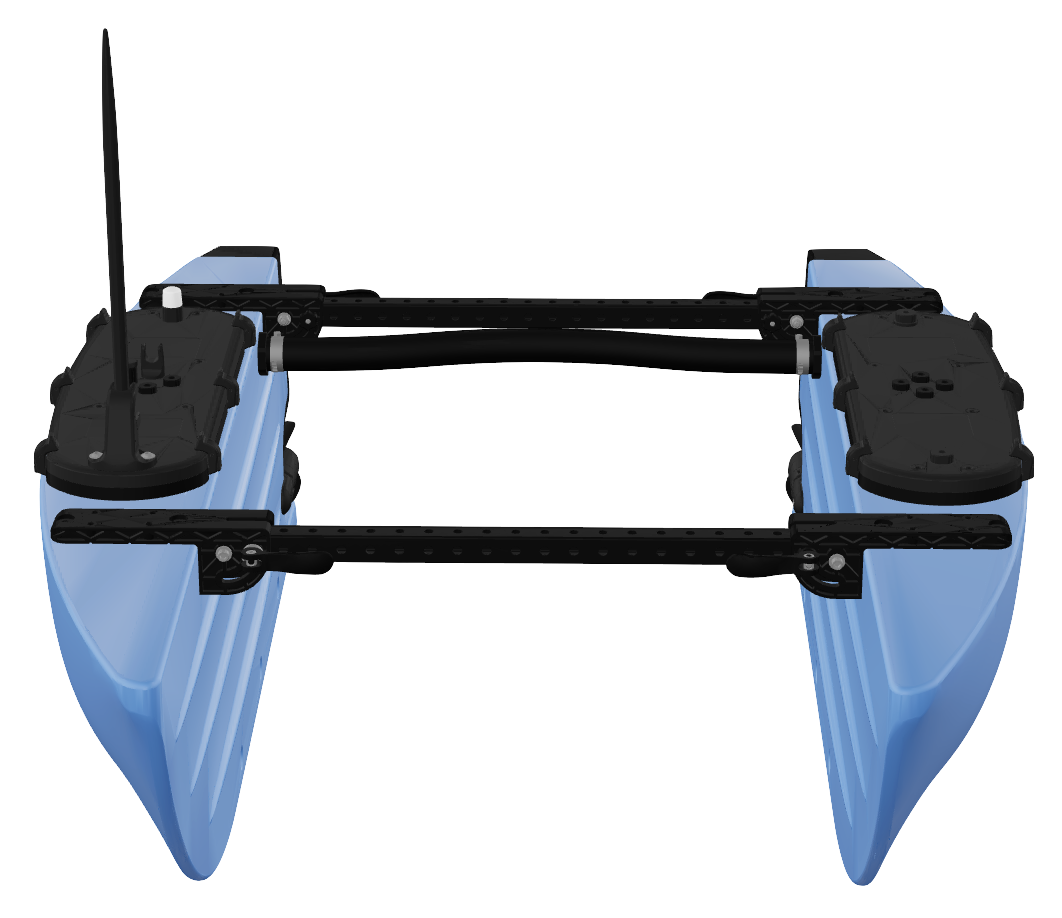
**无人船 (USV) 控制**:管理 BlueBoat 等无人船进行水文调查、环境监测等。
**通用机器人开发**:作为 ArduPilot/PX4 自动驾驶仪的地面控制站,用于无人机、无人车等机器人系统的开发和测试。
**教育和研究**:用于机器人学、自主系统等领域的教学和实验平台。