Poppy Humanoid 开源仿人机器人
poppy-humanoid
四足/人形机器人
3/5
🧩 软硬件结合
已发布
项目简介
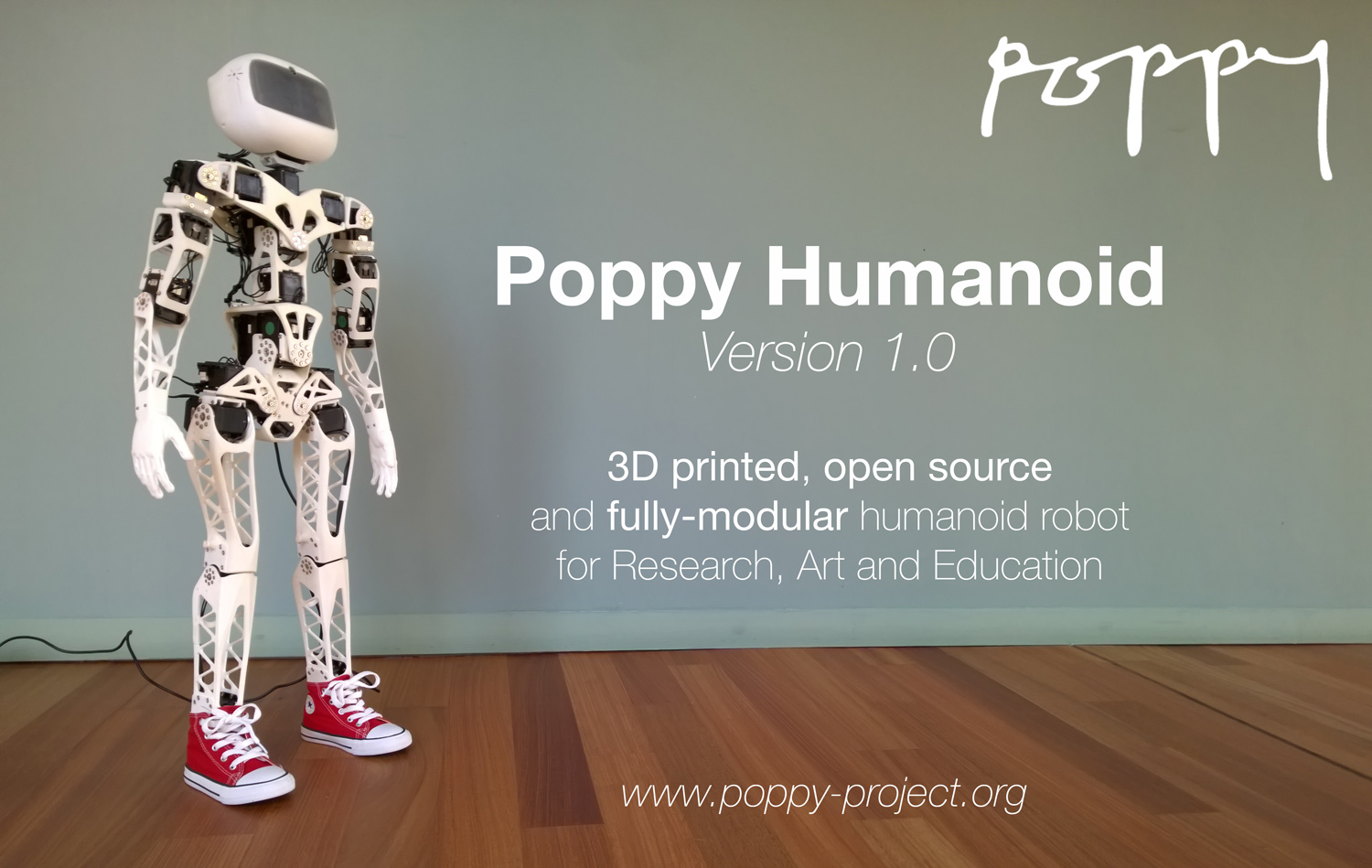
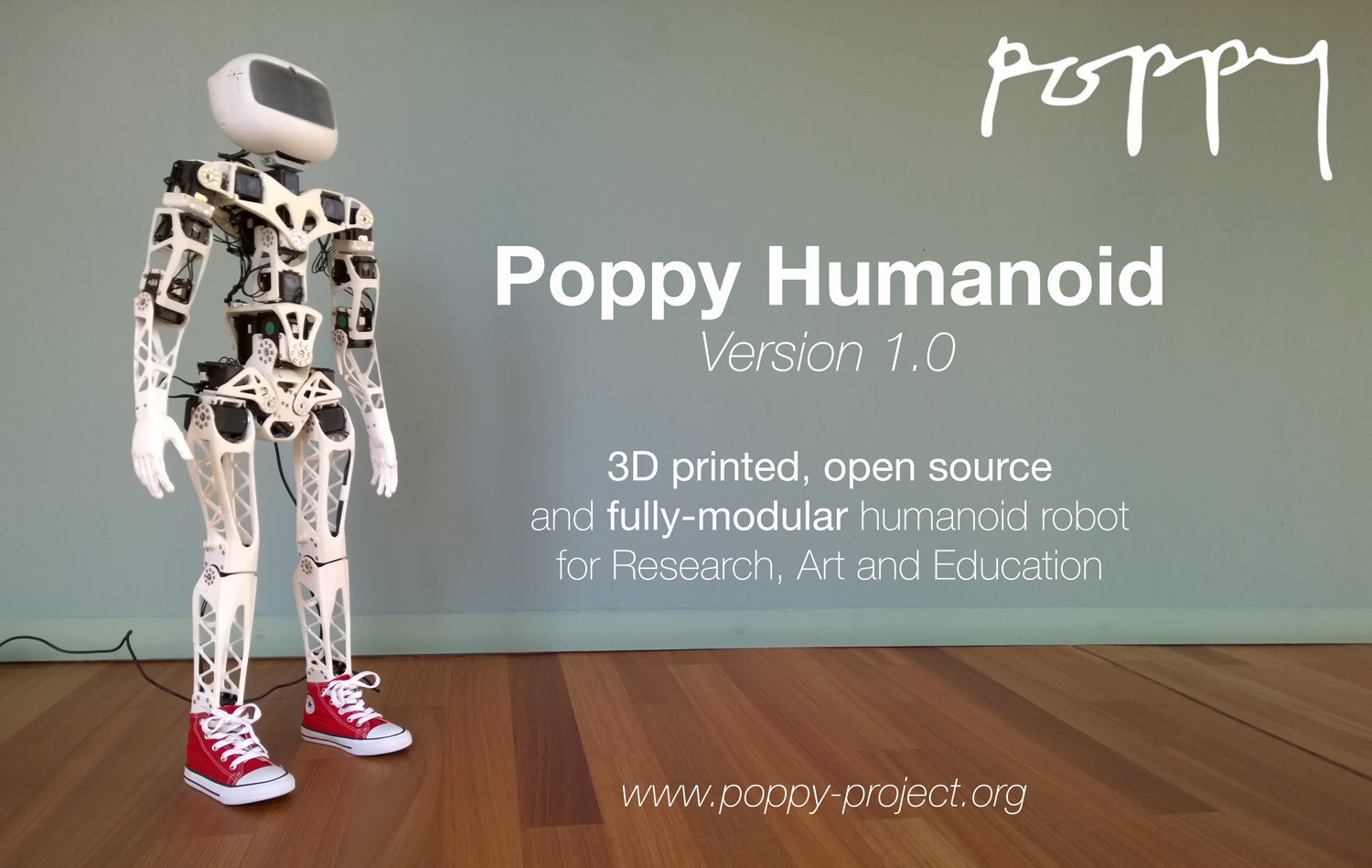
Poppy Humanoid是开源3D打印人形机器人,专为研究与教育优化。
Poppy Humanoid是一款开源且3D打印的人形机器人。针对研究和教育用途进行了优化,其模块化设计支持广泛的应用和实验。
标签
项目特点
**完全开源**:硬件设计(Solidworks/STL/STEP文件)采用 CC BY-SA 4.0 许可,软件采用 GPL v3 许可,所有技术开发工作均可自由获取。
**3D打印制造**:所有结构件均可通过3D打印机制造,降低了复制门槛,便于定制和修改。
**高度模块化**:基于 Robotis Dynamixel 智能伺服电机,每个关节都是一个独立的模块,易于组装、维护和扩展。
**教育研究优化**:专为学术研究和教学场景设计,支持多种编程接口和实验框架。
**社区驱动**:拥有活跃的论坛和贡献者社区,提供全面的文档、组装指南和技术支持。
技术规格
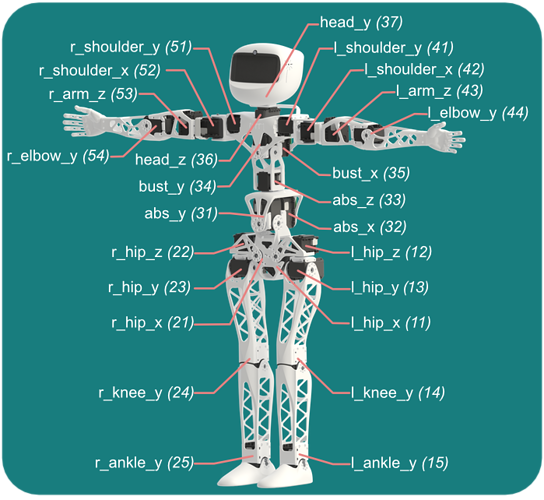
| 自由度 | 25个(由25个 Dynamixel 伺服电机驱动) |
|---|---|
| 主控制器 | Raspberry Pi 3 或 4 |
| 驱动方式 | Robotis Dynamixel 智能伺服电机 |
| 结构材料 | 3D打印塑料(PLA/ABS等) |
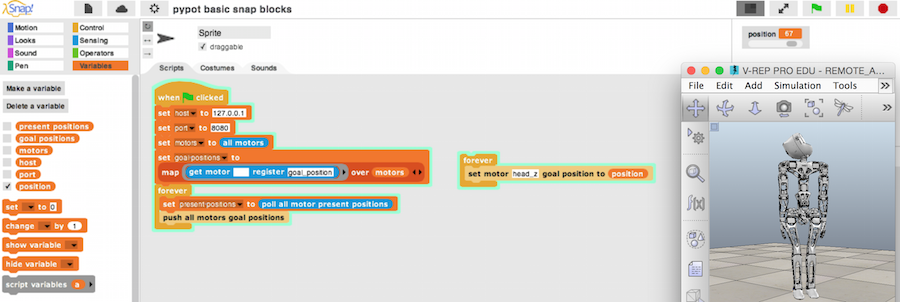
| 软件接口 | Python (pip install poppy-humanoid) |
| 通信方式 | USB2Dynamixel / USB2AX 适配器或板载Raspberry Pi |
| 组装时间 | 约7小时(熟练者) |
| 总成本 | 约 $8000-9000 USD(其中约60%为25个Dynamixel电机成本) |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| Robotis Dynamixel 伺服电机 | 25 | — | 占总成本约60% |
| Raspberry Pi 3 或 4 | 1 | — | 运行控制软件 |
| 3D打印结构件(PLA/ABS) | 1套 | — | STL文件在Releases中下载 |
| USB2Dynamixel 或 USB2AX 适配器 | 1 | — | 可选,用于直接连接电脑 |
| 电机专用电源 | 1 | — | 根据Dynamixel型号选择 |
| 电机连接线缆 | 若干 | — | 根据布线需求 |
| 螺丝、螺母等标准件 | 1套 | — | 详见BOM文档 |
3D 模型
能力画像
⚪ 记忆与知识检索: 2/5
🔵 逻辑推演: 3/5
⚪ 表达与交流: 1/5
⚪ 感知与观察: 2/5
🔵 数理与计算: 3/5
🔵 动手与操作: 5/5
🔵 狂热与坚持: 4/5
🔵 创造与创新: 4/5
项目图库






所需技能
🔧 **动手能力**:需要较强的机械组装能力,能够精确安装25个伺服电机和3D打印结构件,熟练使用各种工具进行装配和调试。
💻 **编程能力**:需要 Python 编程基础,能够安装和配置控制软件,理解机器人运动控制的基本概念。
⚡ **电子电路**:需要基本的电子知识,能够连接电机、主控板和电源,理解串行通信(USB/Dynamixel协议)。
适用场景
**机器人学教学**:作为大学机器人课程的教学平台,学生可以学习运动学、动力学、控制算法等核心概念。
**认知科学研究**:用于探索身体形态、运动控制与学习之间的关系,研究具身认知理论。
**人机交互实验**:作为研究人机交互、社交机器人行为的实验平台。
**开源硬件开发**:作为学习和实践开源硬件设计、3D打印制造的参考项目。
**机器人竞赛**:可用于参加 RoboCup 等仿人机器人竞赛的开发和训练。