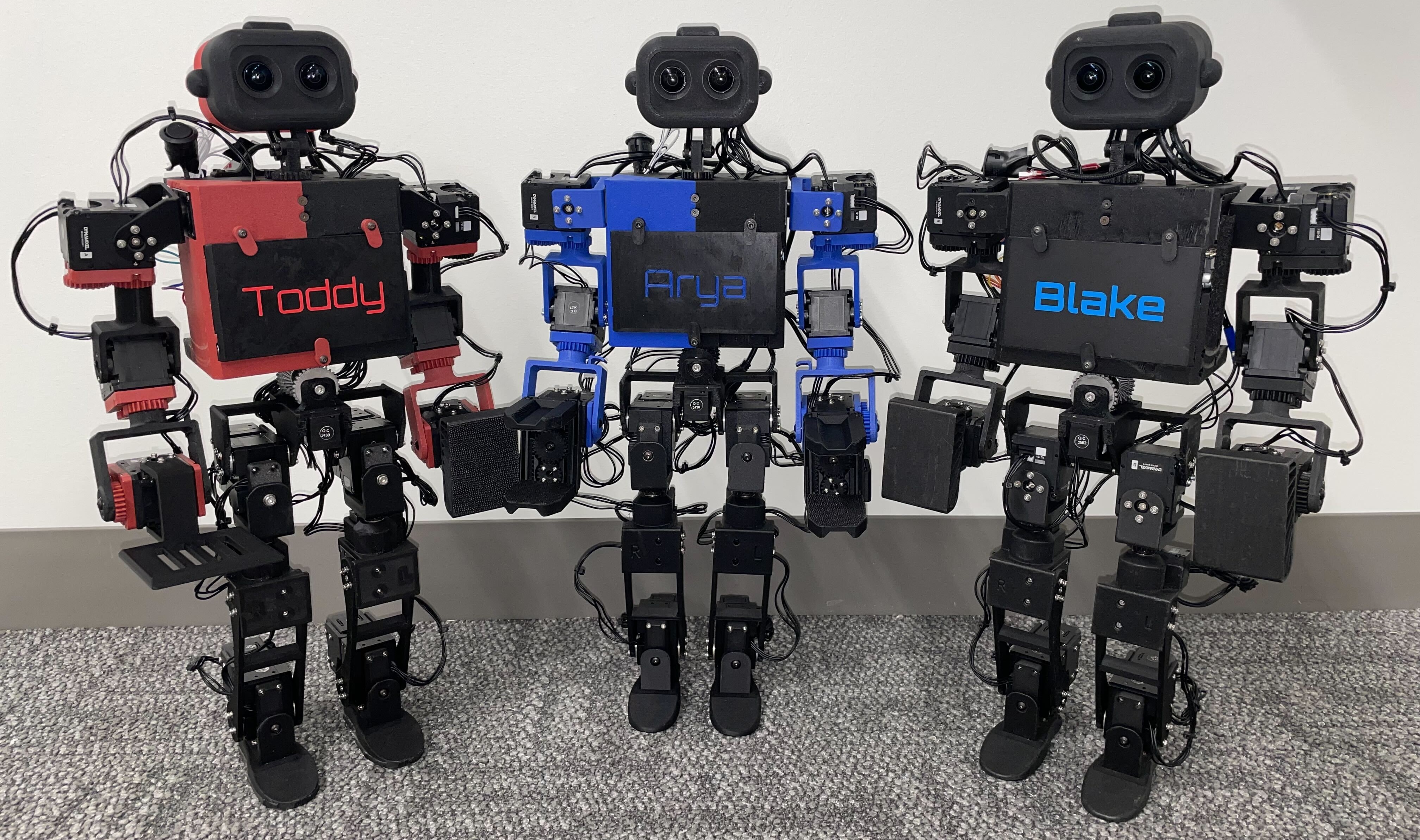
ToddlerBot 开源双足机器人。仿幼儿步态学习、MIT、Python控制栈、官方网站toddlerbot.github.io.
toddlerbot
人形机器人
3/5
人形机器人
已发布
项目简介
ToddlerBot开源双足机器人,仿幼儿步态学习,Python控制栈。
标签
项目特点
**仿幼儿步态学习**:模拟人类幼儿从蹒跚学步到稳定行走的学习过程,提供多种步态控制算法。
**完全开源**:硬件设计、固件、控制代码全部开源,采用 MIT 许可证,可自由修改和商用。
**Python 控制栈**:使用 Python 编写上层控制逻辑,降低编程门槛,方便快速迭代和实验。
**3D 打印友好**:所有结构件均可通过 3D 打印制作,无需昂贵加工设备。
**模块化设计**:关节、传感器、控制器等模块化,便于维修、升级和扩展。
**社区支持**:有官方文档、教程和活跃的 GitHub 社区,提供持续更新和问题解答。
技术规格
| 自由度 | |
|---|---|
| 驱动方式 | |
| 控制器 | |
| 传感器 | |
| 通信接口 | |
| 电源 | |
| 尺寸 | |
| 重量 | |
| 结构材料 | |
| 控制频率 |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| 3D 打印腿部零件 | 1套 | — | PLA/PETG 打印,约20个零件 |
| 3D 打印躯干零件 | 1套 | — | 含电池仓、控制器支架 |
| MG996R 伺服电机 | 6个 | — | 或同等扭矩金属齿轮舵机 |
| 伺服电机支架 | 6个 | — | 3D 打印或金属件 |
| Raspberry Pi 4 (2GB+) | 1个 | — | 或 Jetson Nano |
| MPU6050 IMU 模块 | 1个 | — | I2C 接口 |
| 足底压力传感器 (FSR) | 2个 | — | 可选,用于步态反馈 |
| 7.4V 2S 锂电池 | 1个 | — | 容量建议 1000mAh 以上 |
| 5V 稳压模块 | 1个 | — | 为 Raspberry Pi 供电 |
| 杜邦线/排线 | 若干 | — | 用于信号和电源连接 |
| 面包板或 PCB | 1个 | — | 用于电路搭建 |
| M3 螺丝螺母 | 若干 | — | 用于固定结构件和舵机 |
3D 模型
能力画像
**记忆与知识检索**:2/5 — 项目本身不涉及记忆系统,但需要查阅文档和教程来获取步态算法知识。
**动手与操作**:4/5 — 需要组装 3D 打印件、连接电路、调试舵机,动手要求较高。
**编程与算法**:4/5 — 需要编写 Python 控制代码,理解步态规划和 PID 控制等算法。
**设计与建模**:3/5 — 提供现成 3D 模型,但修改或优化结构需要 CAD 建模能力。
**实验与调试**:4/5 — 需要反复调试步态参数、传感器校准和电机控制,实验性强。
**协作与分享**:3/5 — 可通过 GitHub 提交 Issue/PR,但项目规模较小,协作机会有限。
**学习与研究**:5/5 — 非常适合学习双足机器人、步态生成、控制理论等前沿知识。
**系统集成**:3/5 — 需要将机械、电子、软件集成在一起,但模块化设计降低了难度。
项目图库





所需技能
基础 Python 编程
3D 打印操作(或委托打印)
基本电路连接和焊接
伺服电机调试(PWM 控制)
使用 Git 进行版本管理
理解 PID 控制或步态规划(进阶)
基础机械组装能力
适用场景
机器人学课程教学与实验
双足步态算法研究与验证
创客空间或机器人社团项目
个人 DIY 机器人爱好者入门
仿生学与运动控制科研项目
机器人竞赛(如步态挑战赛)
开源硬件社区贡献与学习