RoboRTS
RoboRTS
ROS
1/5
🧩 软硬件结合
已发布

项目简介
用于移动机器人实时策略研究的开源软件栈。
RoboRTS 是由大疆 RoboMaster 团队开发的一款面向移动机器人的开源实时策略(RTS)软件栈,专为 RoboMaster 人工智能挑战赛设计。该项目旨在解决多机器人自主对抗场景中的感知、决策与运动控制问题,为参赛队伍和机器人爱好者提供一套完整、可复用的技术框架。
标签
项目特点
**实时策略研究**:专为移动机器人的实时策略(RTS)研究设计,提供完整的软件栈。
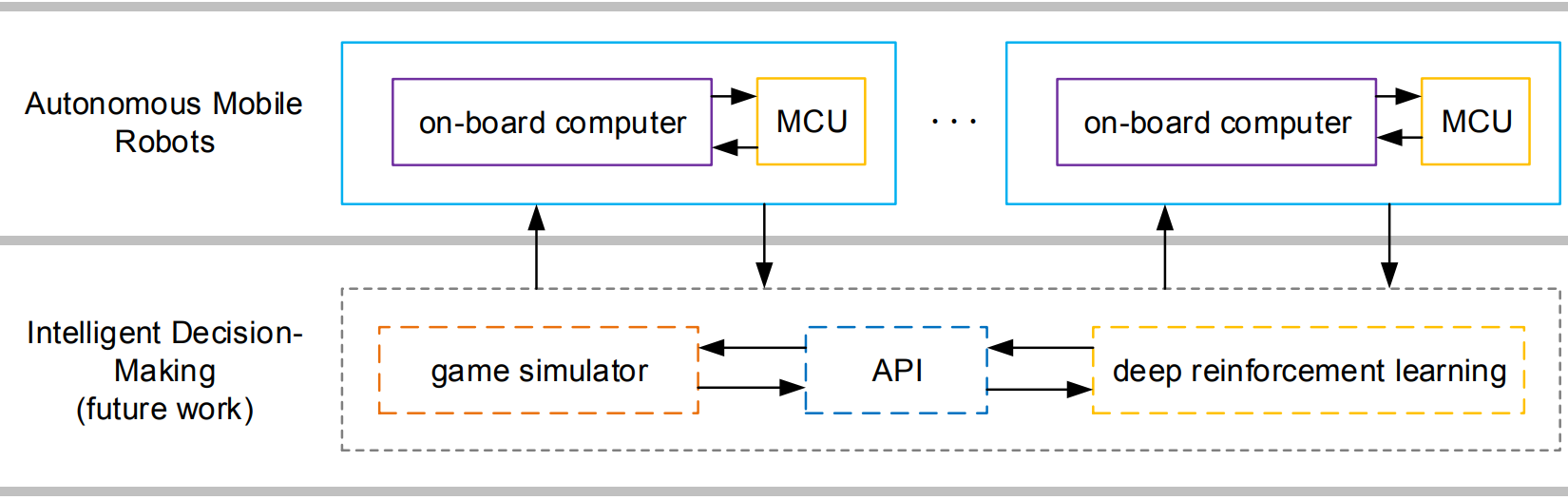
**双层架构**:框架分为自主移动机器人层和智能决策层,层次清晰。
**ROS 集成**:完全支持 ROS(机器人操作系统),提供丰富的社区驱动和平台定制代码。
**官方平台支持**:为 RoboMaster AI 机器人平台提供官方支持,可直接运行。
**竞赛驱动**:由 RoboMaster AI 挑战赛(ICRA)驱动,具有实际应用场景。
技术规格
| 框架架构 | 自主移动机器人层 + 智能决策层(待发布) |
|---|---|
| 操作系统 | ROS (Robot Operating System) |
| 机载计算机 | 运行感知、运动规划、决策模块 |
| MCU | 运行实时底层机器人控制器 |
| 机器人平台 | RoboMaster AI Robot platform |
| 编程语言 | C++ (ROS) |
| 许可证 | GPL-3.0 |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| RoboMaster AI Robot | 1 | — | 官方支持的移动机器人平台 |
| 高性能计算板(如NVIDIA Jetson) | 1 | — | 运行ROS和算法 |
| STM32系列微控制器 | 1 | — | 运行底层实时控制器 |
| 摄像头、激光雷达等 | 1套 | — | 用于感知环境 |
| 电池、电机、底盘等 | 1套 | — | 机器人标准组件 |
能力画像
⚪ 记忆与知识检索: 2/5
🔵 逻辑推演: 4/5
⚪ 表达与交流: 1/5
⚪ 感知与观察: 3/5
⚪ 数理与计算: 4/5
⚪ 动手与操作: 3/5
⚪ 狂热与坚持: 4/5
⚪ 创造与创新: 4/5
项目图库

所需技能
🔧 **动手能力**:需要组装和调试RoboMaster AI机器人平台,包括硬件集成和传感器安装。
💻 **编程能力**:需要精通C++和ROS,能够理解并修改感知、运动规划和决策模块代码。
⚡ **电子电路**:需要了解MCU编程和底层控制器,能够调试机器人驱动系统。
适用场景
**RoboMaster AI 挑战赛**:直接用于参加ICRA RoboMaster AI挑战赛,实现多机器人自动对战。
**移动机器人实时策略研究**:作为学术研究平台,探索多智能体决策、路径规划和博弈论。
**机器人教育**:用于高校机器人课程,教授ROS、SLAM、运动规划等高级主题。
**自主导航开发**:基于其自主移动机器人层,开发室内外自主导航应用。