Dreame 追觅扫地机器人 Home Assistant 集成
dreame-vacuum
智能家居, 机器人
3/5
🧩 软硬件结合
已发布
项目简介
Home Assistant integration for Dreame robot vacuums with map support
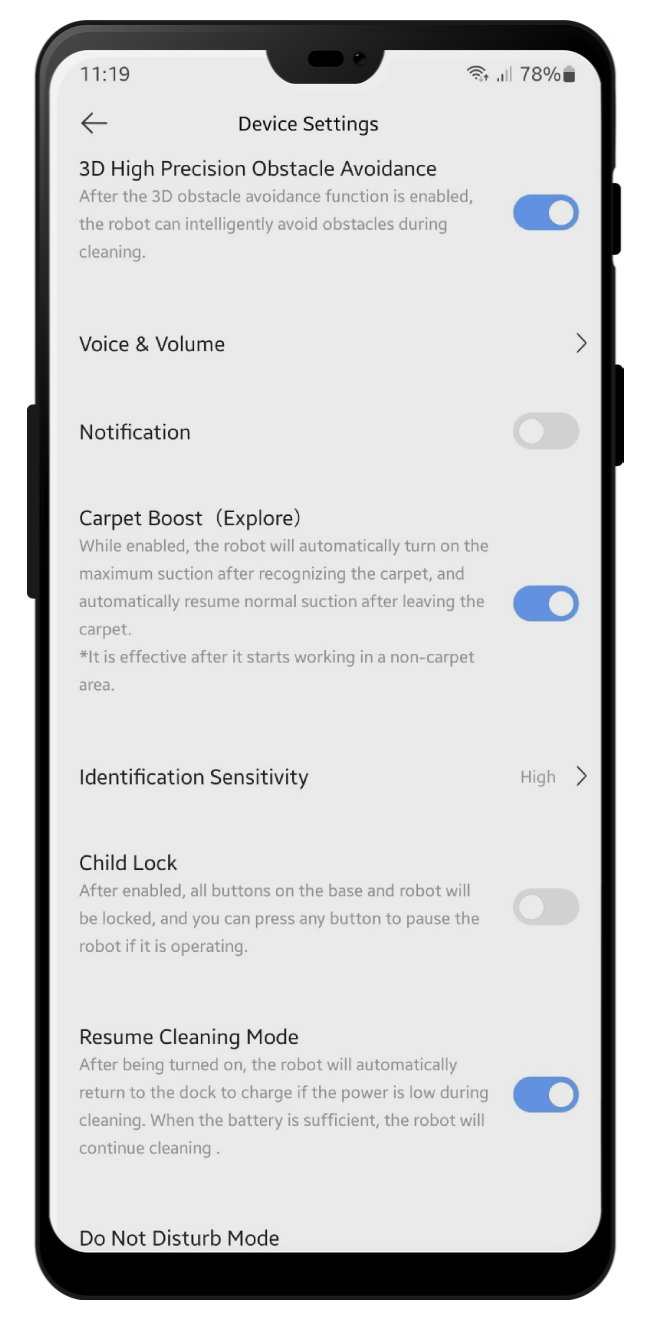
dreame-vacuum 是一个专为 Home Assistant 平台设计的开源集成组件,旨在实现对追觅(Dreame)品牌及部分米家(Mijia)和 MOVA 系列扫地机器人的全面本地化控制与管理。该项目由开发者 Tasshack 维护,通过深度整合,它能够完全替代原厂 App,让用户在一个统一的智能家居界面中完成所有操作。
标签
项目特点
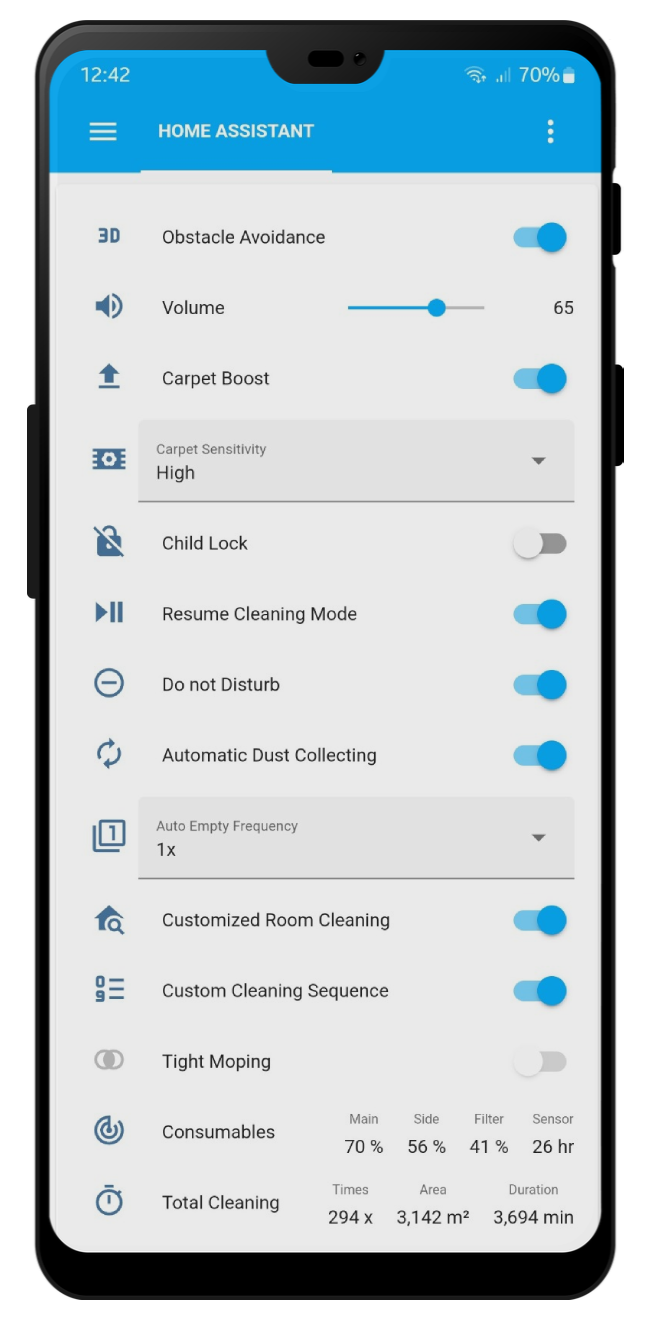
**自动生成设备实体**:自动为扫地机器人创建各种传感器和控制实体,方便在 Home Assistant 中使用。
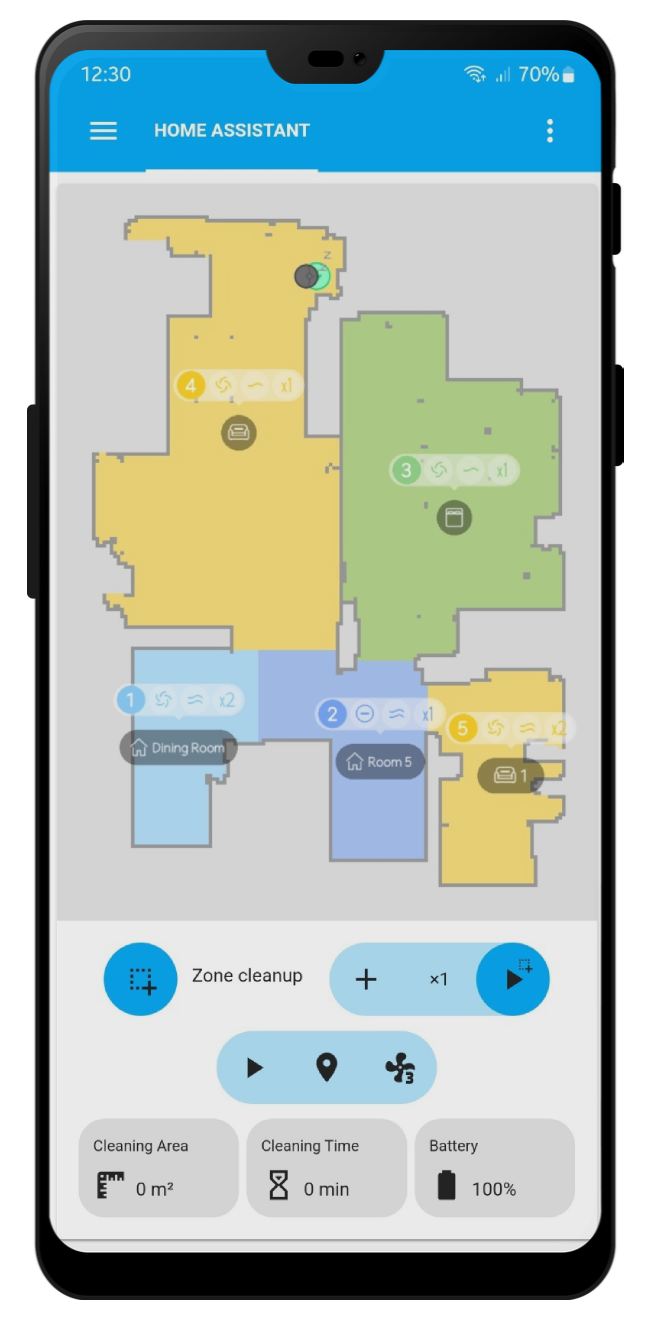
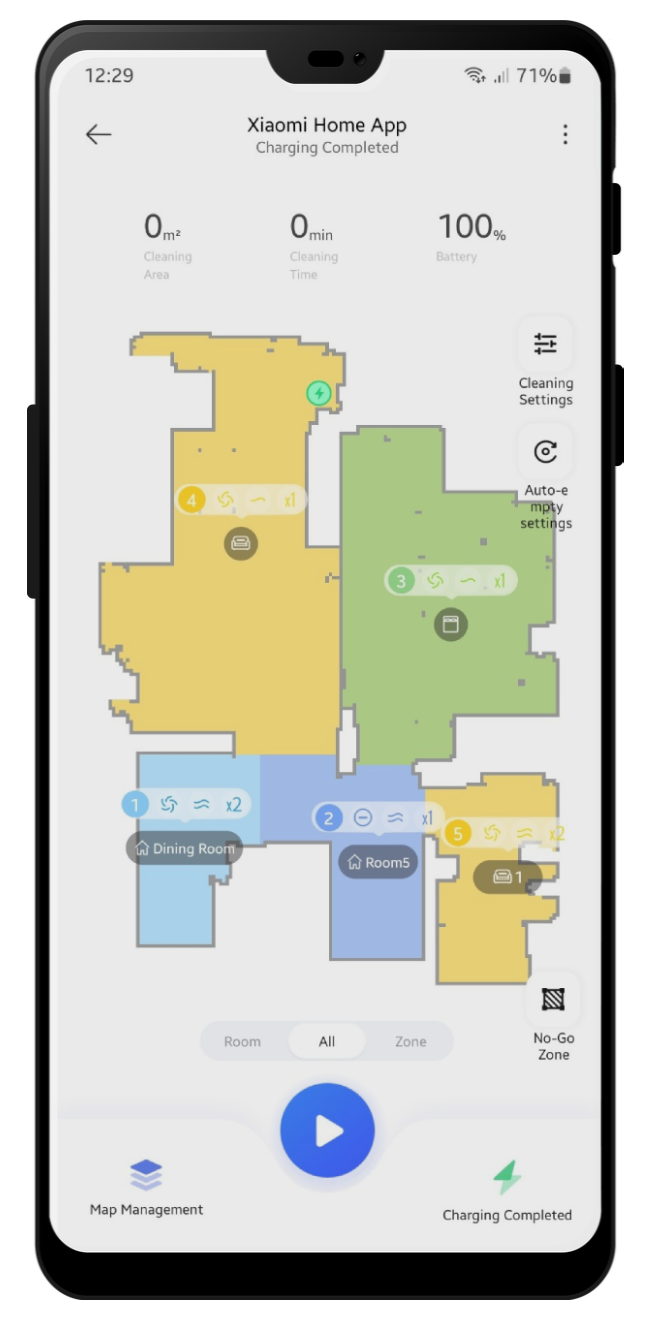
**实时与多楼层地图支持**:支持显示扫地机器人的实时清洁地图,并能处理多楼层地图的切换和显示。
**自定义房间清洁实体**:为每个房间生成独立的清洁实体,方便通过自动化或语音控制指定房间清洁。
**丰富的服务与示例**:提供多种设备控制服务和地图操作服务,并附有详细的使用示例。
**持久化通知与错误报告**:能够将机器人的错误和状态信息以持久化通知的形式推送到 Home Assistant。
**自动化事件支持**:提供多种事件,方便用户创建复杂的自动化规则。
**兼容多种 Lovelace 地图卡片**:支持 Xiaomi Vacuum Map Card、Vacuum Card、Valetudo Map Card 等主流地图卡片。
技术规格
| 平台 | Home Assistant (自定义集成) |
|---|---|
| 支持设备 | Dreame、Mijia、MOVA 品牌的多款扫地机器人(详见支持设备列表) |
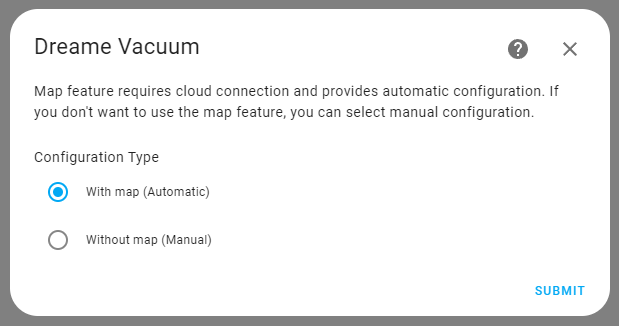
| 配置方式 | 通过 Home Assistant 的配置流(Config Flow)或手动配置 |
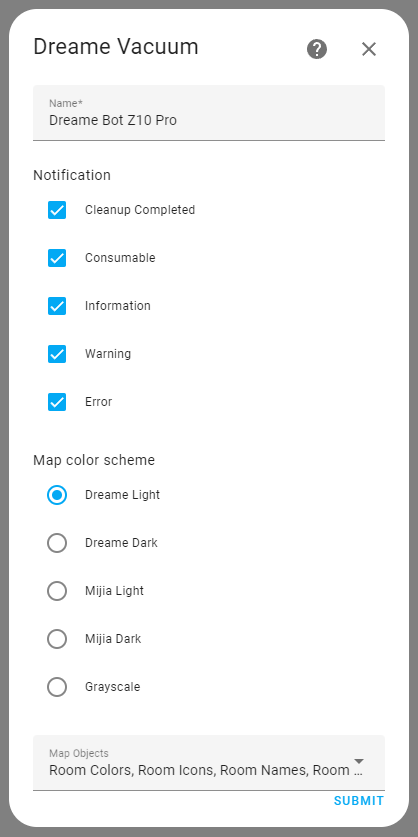
| 地图支持 | 实时地图、多楼层地图、颜色方案自定义 |
| 通信协议 | 基于 python-miio 库,需与设备在同一子网 |
| 安装方式 | 手动安装或通过 HACS 安装 |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| 兼容的 Dreame/Mijia/MOVA 扫地机器人 | 1 | — | 详见支持设备列表 |
| Home Assistant 系统 | 1 | — | 已安装并运行 |
| HACS (可选) | 1 | — | 用于简化安装 |
能力画像
⚪ 记忆与知识检索: 1/5
🔵 逻辑推演: 2/5
⚪ 表达与交流: 1/5
⚪ 感知与观察: 1/5
⚪ 数理与计算: 1/5
🔵 动手与操作: 2/5
⚪ 狂热与坚持: 1/5
⚪ 创造与创新: 2/5
项目图库

所需技能
🔧 **动手能力**:无需硬件动手能力,主要是软件配置和 YAML 编辑。
💻 **编程能力**:基础,需要能够编辑 YAML 配置文件,理解简单的服务调用和自动化规则。
⚡ **电子电路**:无需。
适用场景
**智能家居集成**:将 Dreame 扫地机器人无缝集成到 Home Assistant 中,实现统一控制。
**高级自动化**:利用事件和服务创建复杂的自动化场景,例如离家时自动清扫、根据房间占用情况触发清洁等。
**地图可视化**:在 Home Assistant 仪表盘上实时查看清洁地图和机器人状态。
**多楼层管理**:对于拥有多楼层房屋的用户,可以方便地管理和切换不同楼层的地图。