Zeroth-01 机器人
zeroth-bot
四足/人形机器人
3/5
🧩 软硬件结合
已发布
项目简介
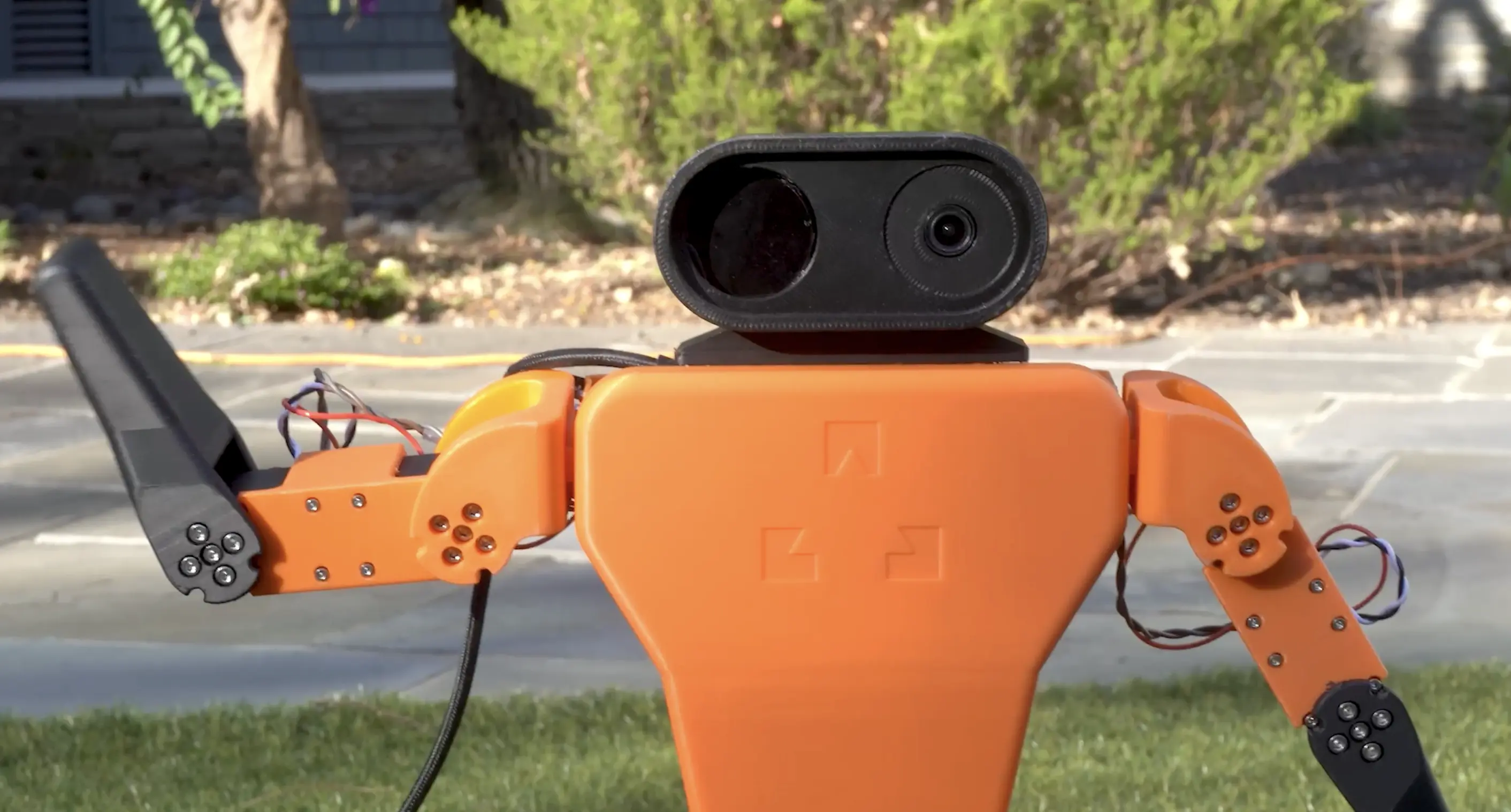
3D打印开源人形机器人平台,用于sim-to-real和RL。
用于仿真到现实迁移和强化学习的3D打印开源人形机器人平台。
标签
项目特点
**完全开源**:硬件、软件(SDK)和仿真环境全部开源,无任何闭源组件。
**低成本**:物料清单(BoM)起价仅350美元,极大降低了人形机器人研究的门槛。
**仿真到现实(Sim-to-Real)**:提供GPU加速的强化学习训练管道,并支持将训练好的策略直接部署到真实机器人上。
**模块化设计**:核心组件包括机器人操作系统(KOS-ZBot)和强化学习训练环境(K-Sim Gym ZBot),易于扩展和定制。
**社区驱动**:由开源社区积极开发和维护,欢迎提交问题、拉取请求和加入Discord社区。
技术规格
| 机器人类型 | 人形机器人 |
|---|---|
| 驱动方式 | 舵机(Feetech) |
| 传感器 | IMU(惯性测量单元) |
| 操作系统 | KOS-ZBot(基于Python的机器人操作系统) |
| 训练框架 | K-Sim Gym ZBot(基于GPU加速的强化学习) |
| 仿真模型 | MJCF、URDF |
| 编程接口 | Python API |
| 物料成本 | 起价 $350 |
| 当前状态 | 公开测试版(计划2025年6月发布V1.0) |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| 3D打印件(PLA/PETG) | 1套 | — | 需自行打印,具体文件见仓库 |
| Feetech 舵机 | 若干 | — | 具体型号和数量见文档 |
| IMU 模块 | 1 | — | 用于姿态检测 |
| 主控板(如Raspberry Pi / Jetson) | 1 | — | 具体型号见文档 |
| 电池及电源管理模块 | 1 | — | 具体规格见文档 |
| 螺丝、螺母、轴承等 | 1套 | — | 标准五金件 |
能力画像
⚪ 记忆与知识检索: 2/5
🔵 逻辑推演: 4/5
⚪ 表达与交流: 1/5
⚪ 感知与观察: 3/5
⚪ 数理与计算: 4/5
⚪ 动手与操作: 5/5
⚪ 狂热与坚持: 4/5
⚪ 创造与创新: 4/5
项目图库
所需技能
🔧 **动手能力**:需要具备3D打印、电子元件焊接、机械组装等动手能力,能够独立完成机器人的硬件搭建和调试。
💻 **编程能力**:需要掌握Python编程,能够使用KOS-ZBot的API进行机器人控制,并理解强化学习训练流程。
⚡ **电子电路**:需要了解基本的电子电路知识,能够连接舵机、传感器和主控板,并进行故障排查。
适用场景
**机器人研究**:作为低成本、开源的人形机器人平台,用于运动控制、强化学习、仿真到现实迁移等学术研究。
**教育**:适合高校或培训机构用于机器人学、人工智能、控制理论等课程的教学实践。
**开源社区开发**:开发者可以基于此平台进行二次开发,贡献新的功能、算法或硬件改进。
**个人爱好**:对于有动手能力和编程基础的机器人爱好者,可以低成本地搭建和探索人形机器人。