OpenROV 软件
openrov-software
智能硬件
1/5
🧩 软硬件结合
已发布
项目简介
Meta项目,整合所有OpenROV软件项目。
OpenROV Software 是一个面向水下探索与远程机器人操作的开源软件项目,由 OpenROV 社区维护,旨在为 DIY 爱好者、科研人员及水下探险者提供一套完整的遥控潜水器(ROV)控制与管理解决方案。该项目解决了传统水下机器人软件系统封闭、定制成本高的问题,让用户能够自由组装、配置和操控自己的水下航行器。
项目特点
**模块化架构**:将 ROV 控制、服务管理、固件、系统定制等拆分为独立的子项目,便于开发和维护。
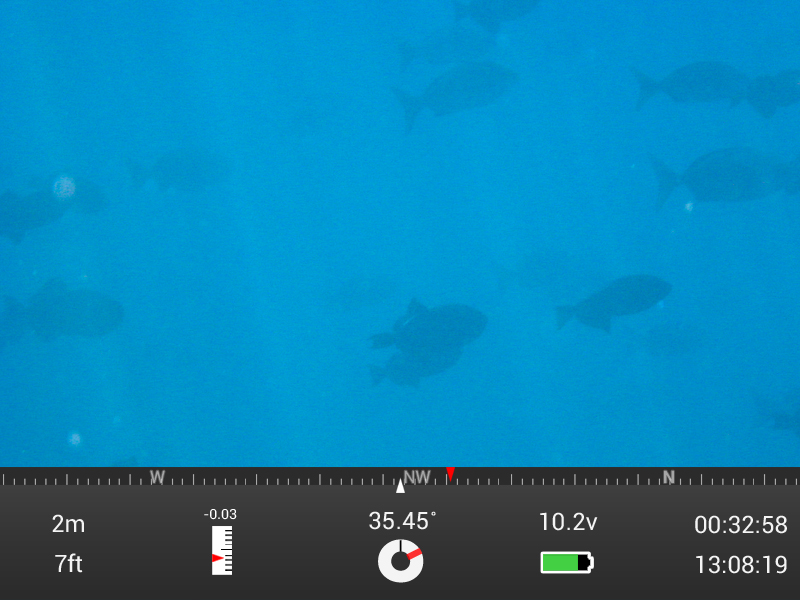
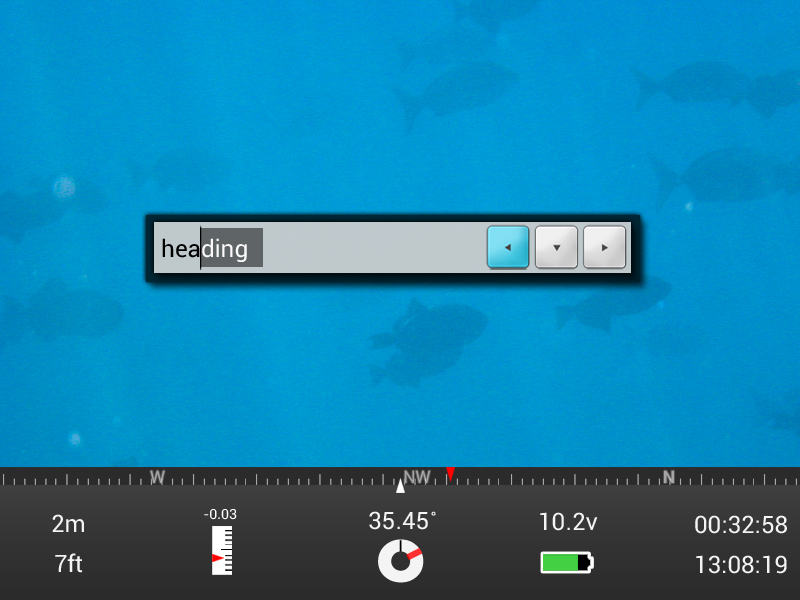
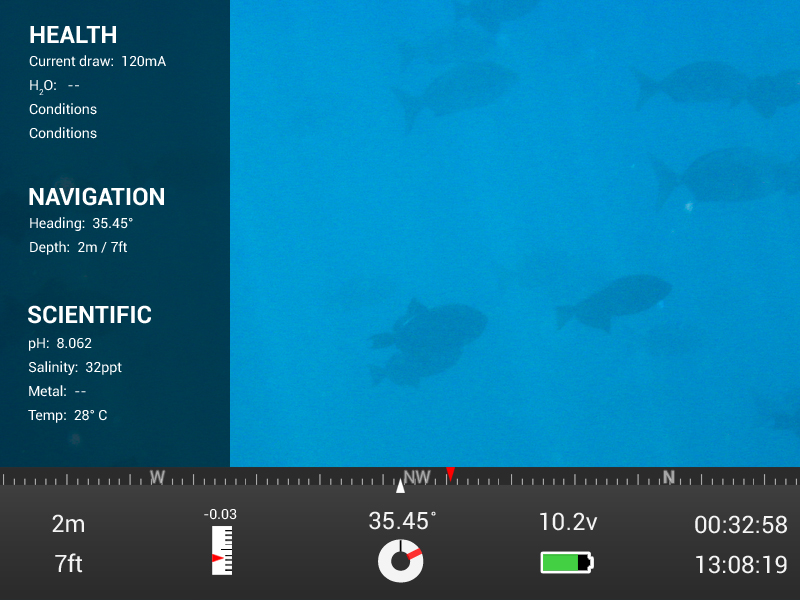
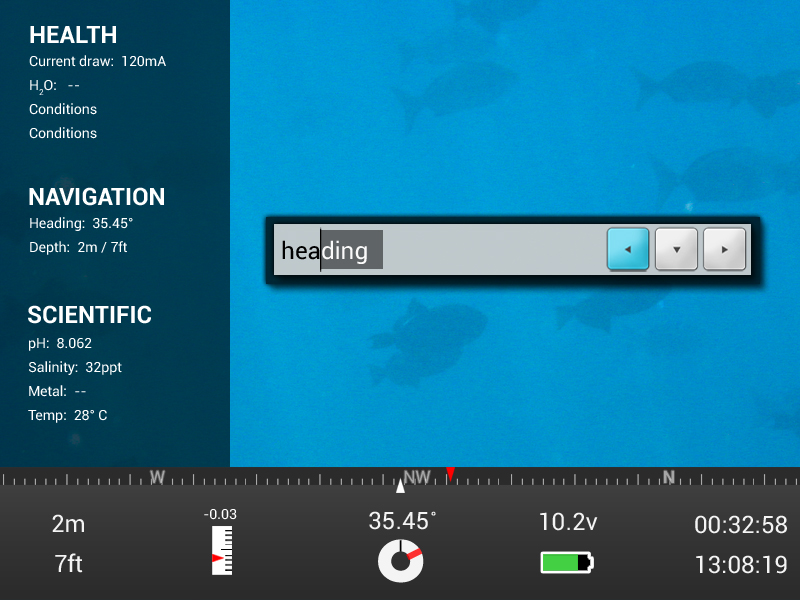
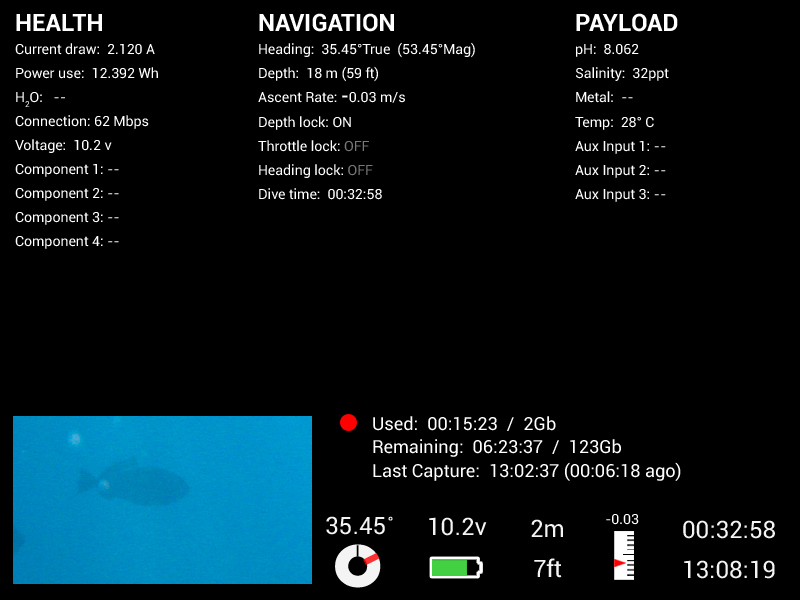
**完整的软件栈**:覆盖从底层固件(Arduino)、操作系统镜像定制,到上层驾驶控制界面(Cockpit)和后台服务管理(Dashboard)的全链路。
**基于 BeagleBone**:ROV 的主控板基于 BeagleBone 平台,软件针对其进行了优化和定制。
**社区驱动**:作为 OpenROV 社区的核心项目,鼓励用户贡献代码,并提供了清晰的贡献指南和 CLA 协议。
**双许可证**:旨在为非商业用途提供免费且可修改的软件,同时为商业用途提供授权选项。
技术规格
| 目标平台 | BeagleBone (用于 ROV 主控) |
|---|---|
| 核心子项目 | openrov-cockpit, openrov-dashboard, openrov-software-arduino |
| 操作系统 | 基于 Debian 的定制镜像 |
| 编程语言 | JavaScript (Node.js), Arduino C/C++ |
| 通信协议 | 通过浏览器进行网络隧道连接 (openrov-proxy) |
| 固件 | 用于 ROV 扩展板和控制器板的 Arduino 固件 |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| BeagleBone (如 BeagleBone Black) | 1 | — | 运行核心软件 |
| OpenROV Cape | 1 | — | 连接传感器和电机 |
| Arduino 兼容板 | 1 | — | 运行固件 |
| 详见 openrov-hardware 和 openrov-electronics 仓库 | - | — | 硬件和电子部分不在本软件仓库中 |
能力画像
⚪ 记忆与知识检索: 2/5
🔵 逻辑推演: 3/5
⚪ 表达与交流: 1/5
⚪ 感知与观察: 2/5
⚪ 数理与计算: 3/5
⚪ 动手与操作: 5/5
⚪ 狂热与坚持: 4/5
⚪ 创造与创新: 4/5
项目图库
所需技能
🔧 **动手能力**:需要具备组装和调试水下机器人硬件的能力,包括3D打印、焊接、防水处理等。
💻 **编程能力**:需要掌握 JavaScript (Node.js) 和 Arduino C/C++,能够理解和修改 ROV 的控制逻辑、界面和固件。
⚡ **电子电路**:需要理解 BeagleBone 和 Arduino 的接口电路,能够排查传感器、电机驱动等电子故障。
适用场景
**水下探索与科考**:用于湖泊、河流或近海的科学考察、环境监测和样本采集。
**教育与研究**:作为高校机器人、嵌入式系统或海洋工程课程的实践平台。
**DIY 创客项目**:为水下机器人爱好者提供一个功能完整、可深度定制的开源方案。
**商业应用**:在获得商业许可后,可用于水下设施检查、管道巡检等专业领域。