lerobot
🤗 LeRobot:通过端到端学习让机器人AI更易用。
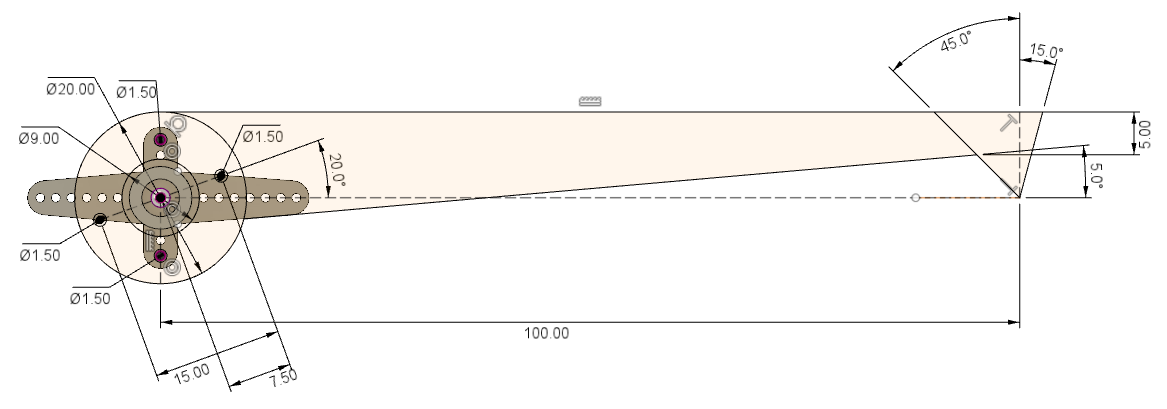
SO-ARM100
标准Open Arm 100,开放机械臂100。
OpenCat-Quadruped-Robot
开源四足机器人宠物框架,用于开发波士顿动力风格的四足机器人。
spotMicro
Spot Micro四足机器人项目。
OpenCat-Old
可编程高机动性机器猫,用于STEM教育与AI增强服务。
ODrive
Google Drive GUI 支持 Windows/Mac/Linux。
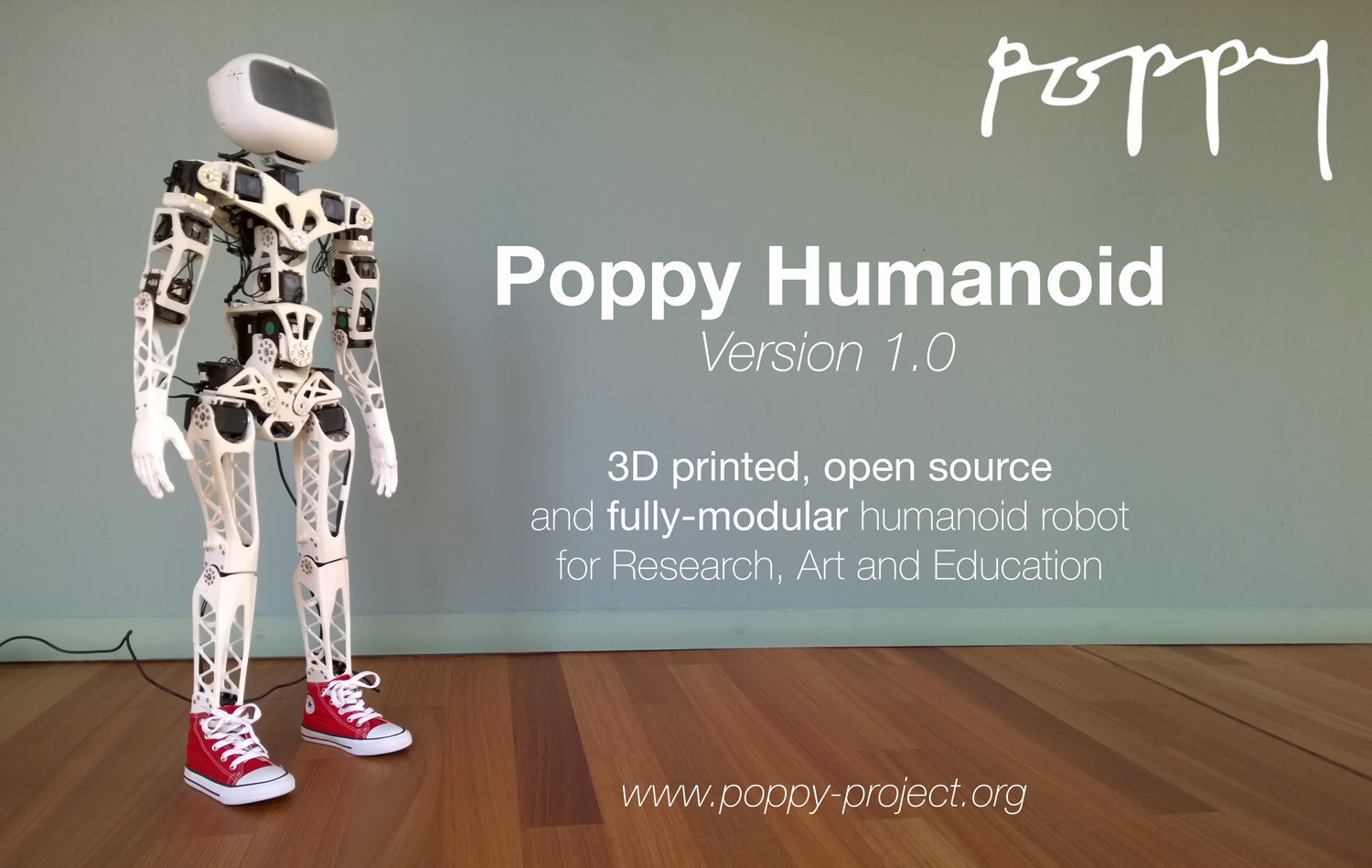
poppy-humanoid
Poppy Humanoid是开源3D打印人形机器人,专为研究与教育优化。
zeroth-bot
3D打印开源人形机器人平台,用于sim-to-real和RL。
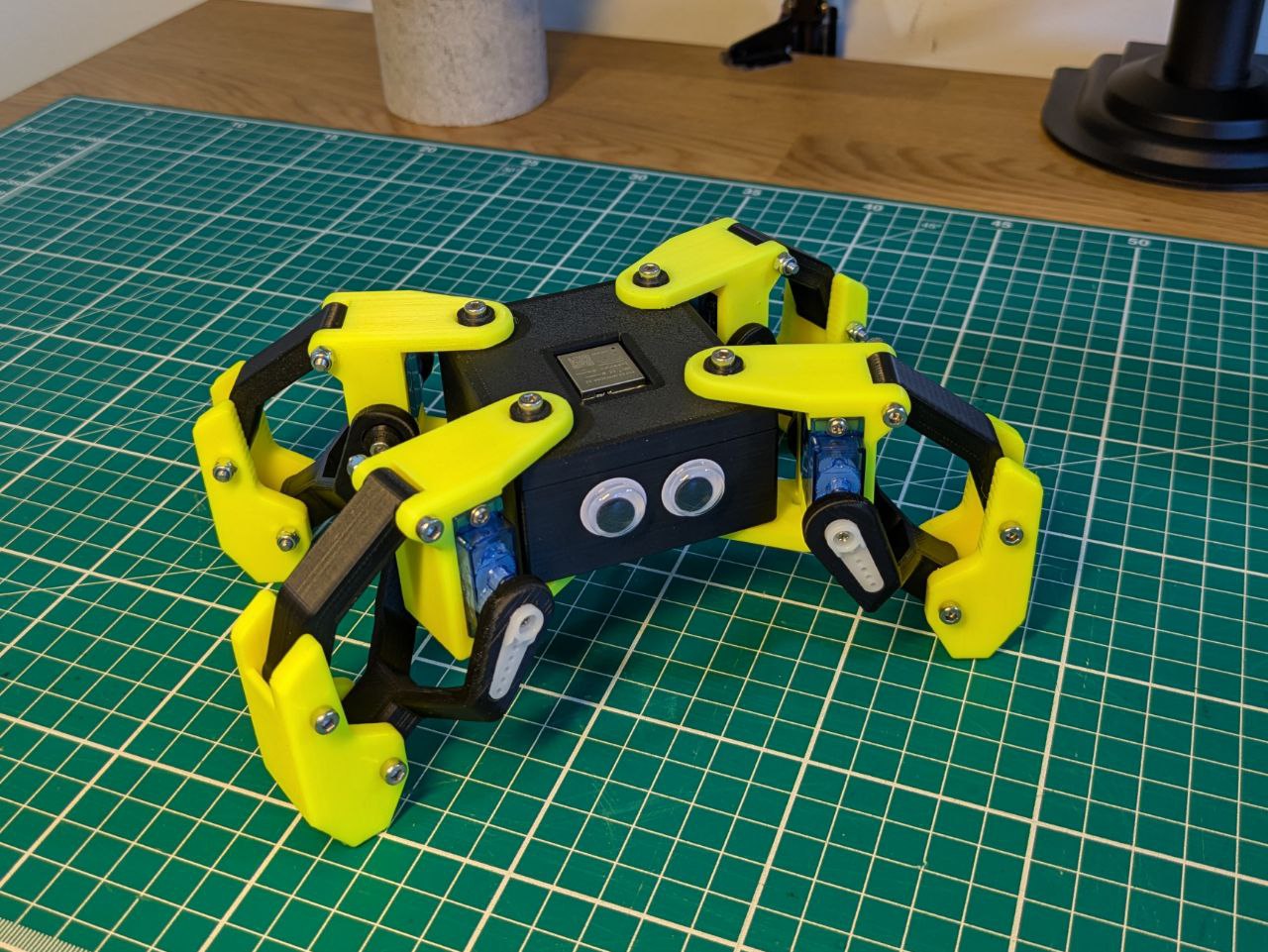
miniKame
ESP8266 based quadruped with 8DOF and oscillator based gaits.
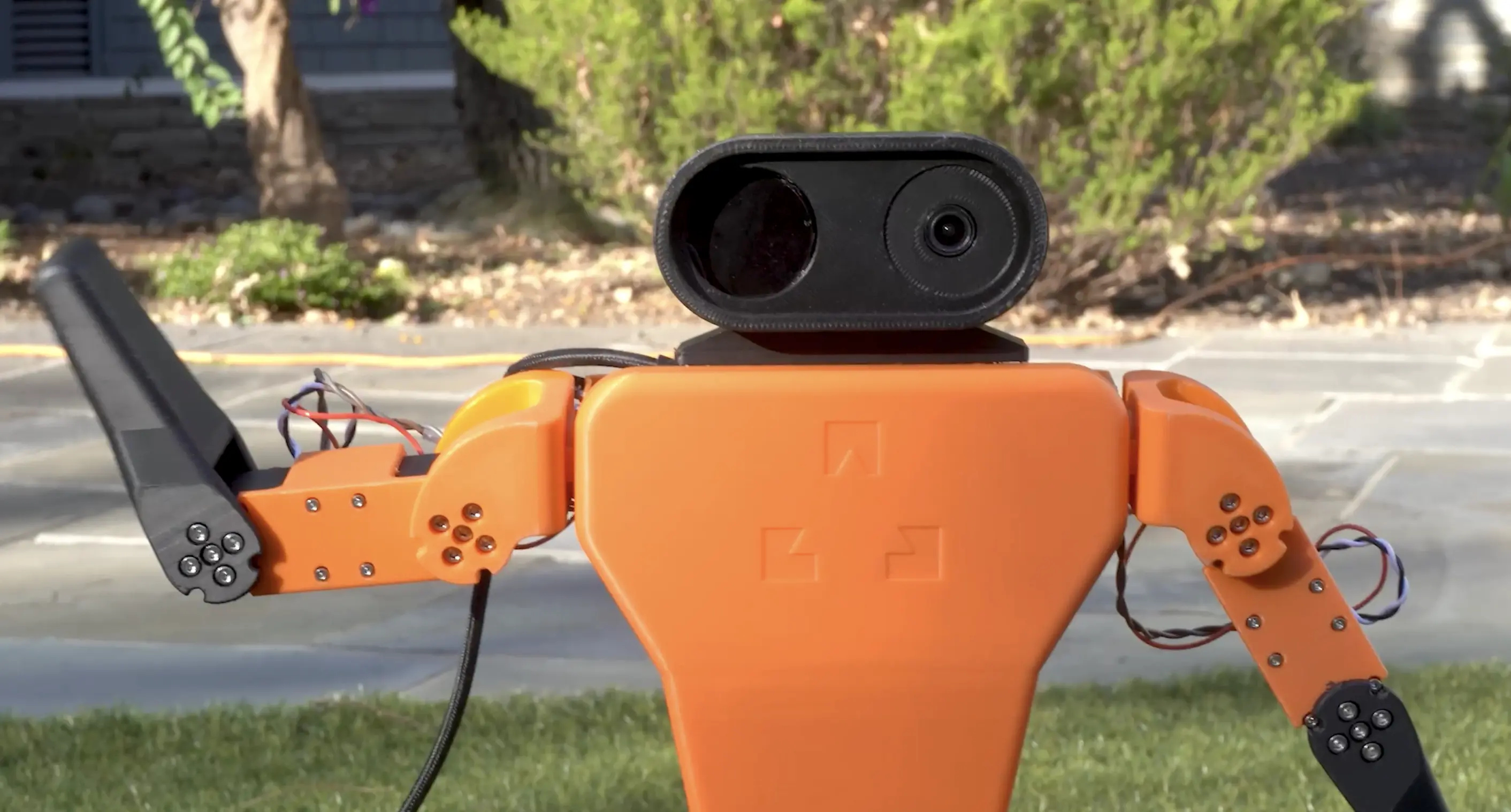
LeLamp
开源表情机器人灯
DDR-opt
差动驱动机器人类通用轨迹优化框架。
PLEN2
全球首个可打印开源人形机器人入门套件。
virtual_robot
FTC Robotics的2D机器人模拟器,帮助初学者学习Java编程。
lerobot-humanoid
kame32
MiniKame升级版,ESP32控制8DOF四足机器人,处理更强,步态更稳。
seb_naver
SEB-Naver:基于SE(2)的类车机器人不平地形局部导航框架。
Pupper
Stanford Pupper项目的构建说明和代码文档。
Build instructions and code documentation for the Stanford Pupper project.
mini-cheetah-pybullet
在PyBullet中实现mini cheetah的MPC和WBC。
reachy2-sdk
Reachy 2 Python SDK:用于控制Reachy 2机器人的Python开发工具包。