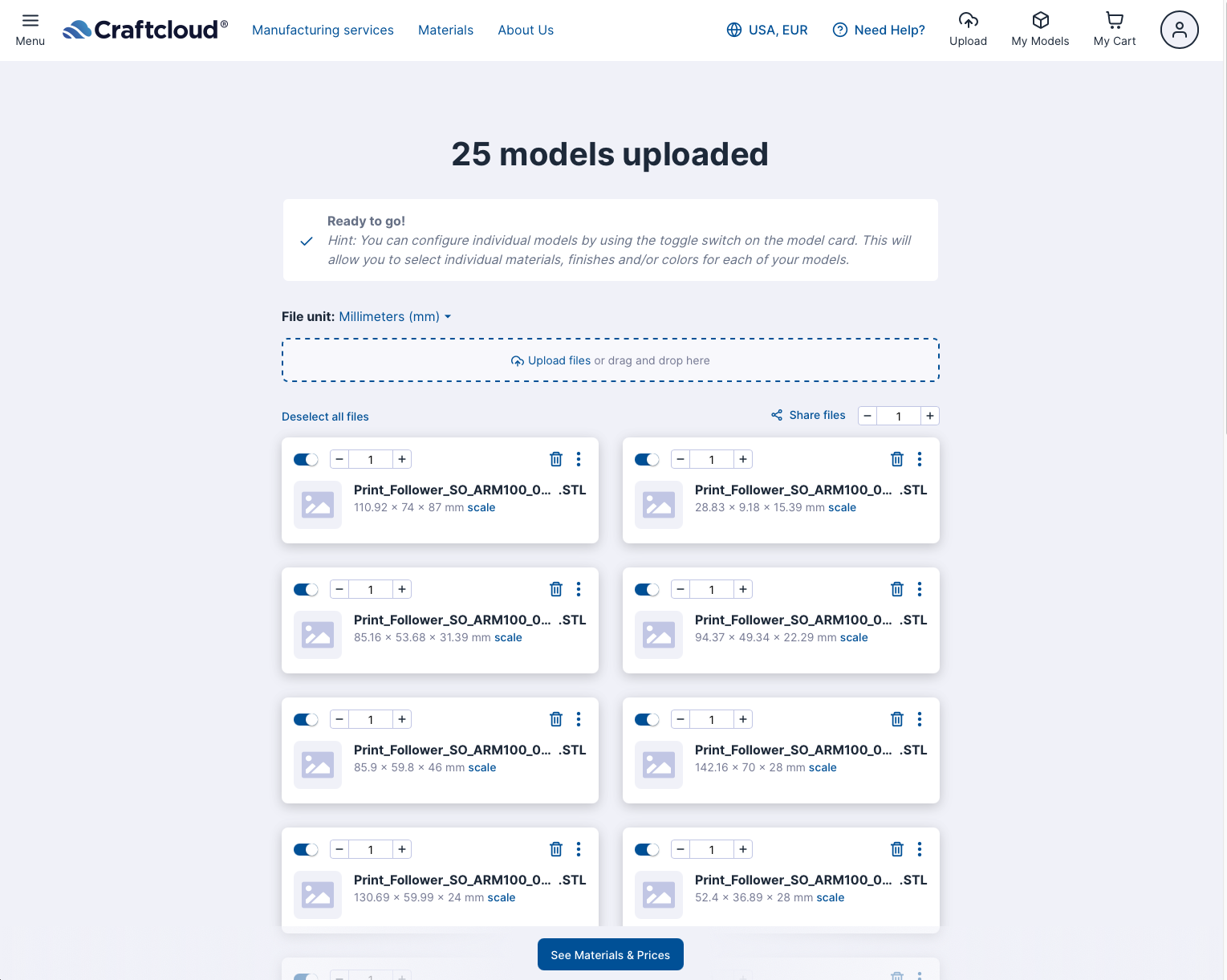
SO-ARM100 标准开源机械臂
SO-ARM100
四足/人形机器人
3/5
🧩 软硬件结合
已发布

项目简介
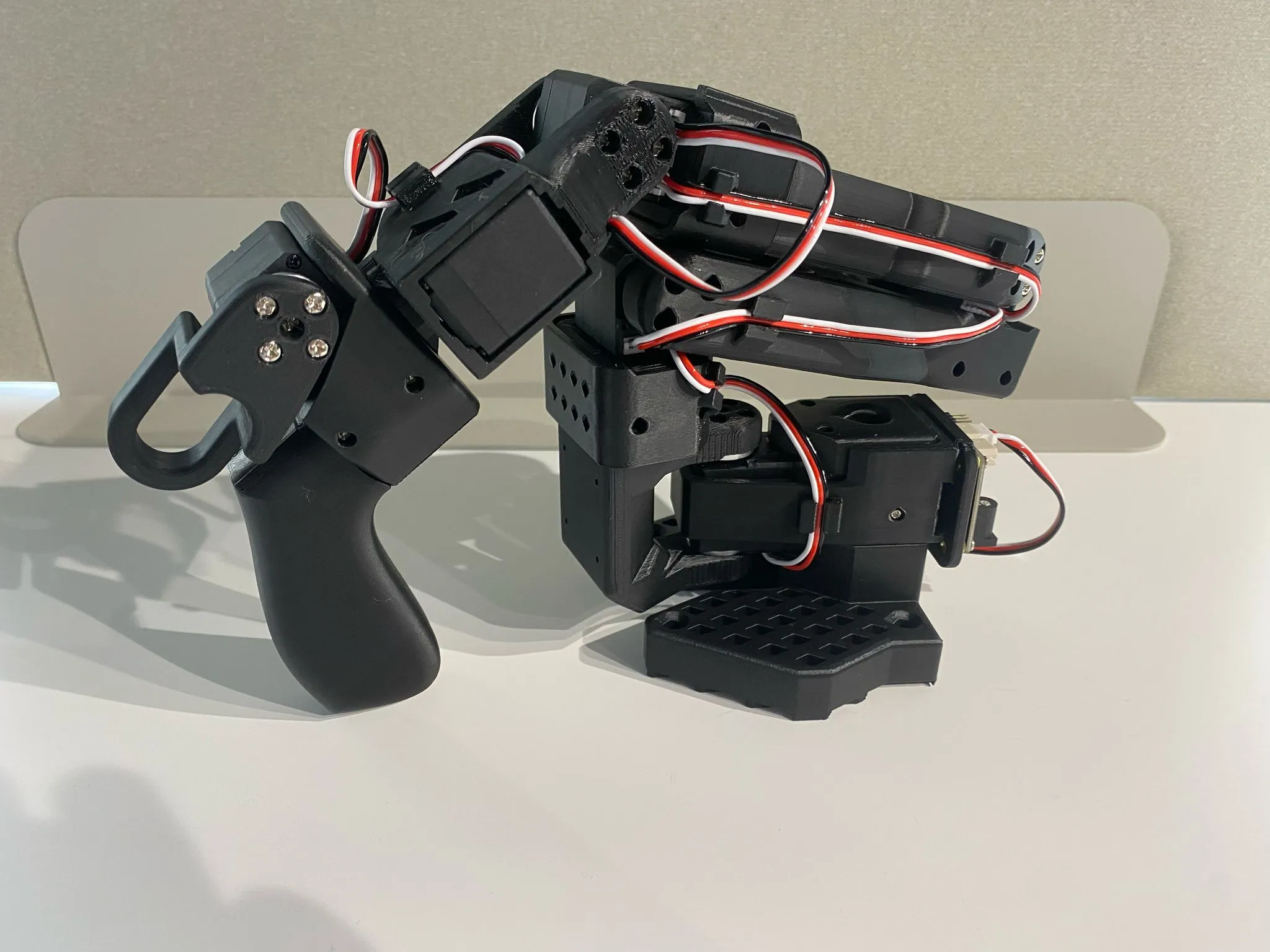
标准Open Arm 100,开放机械臂100。
SO-ARM100是一个开源机器人项目,由NONHUMAN团队维护,旨在打造一个低成本、可扩展的机械臂平台。项目的核心设计文件托管在The Robot Studio仓库,而训练算法则基于Hugging Face的LeRobot框架实现,这意味着开发者可以直接利用LeRobot提供的强化学习和模仿学习工具来训练机械臂完成各种任务。
项目特点
**低成本与开源**:所有设计文件、BOM和组装指南完全开源,总成本远低于商业机械臂。
**遥操作双机械臂**:标准配置包含一个领导臂(Leader Arm,用于控制)和一个从动臂(Follower Arm,用于执行),实现精准的遥操作。
**与LeRobot深度集成**:专为 Hugging Face 的 LeRobot 库设计,可轻松设置、收集数据并训练模仿学习模型。
**易于组装**:SO-101 版本无需拆卸齿轮,简化了组装过程,降低了入门门槛。
**社区驱动**:拥有活跃的 Discord 社区,用户可以交流硬件和软件改进,共同推动项目发展。
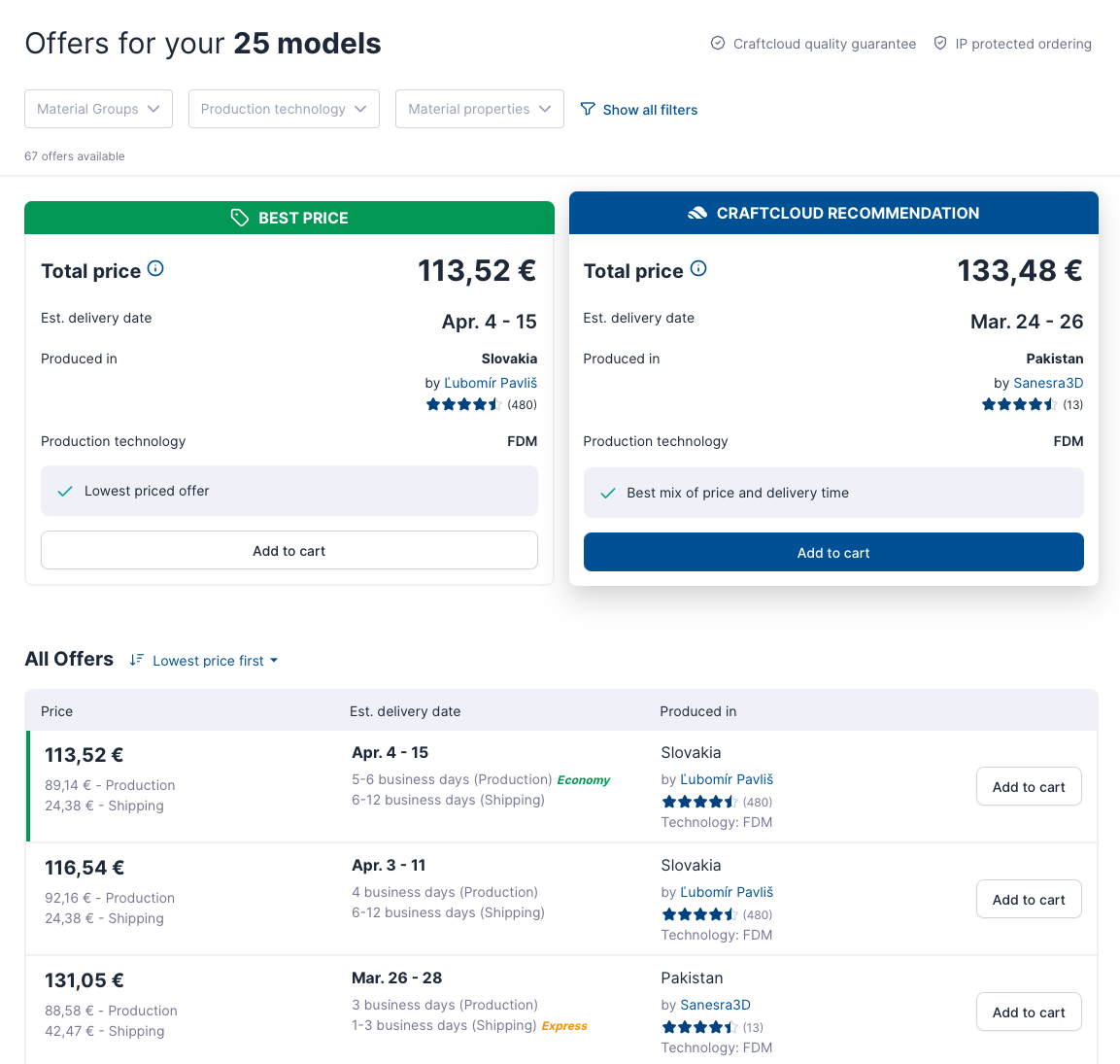
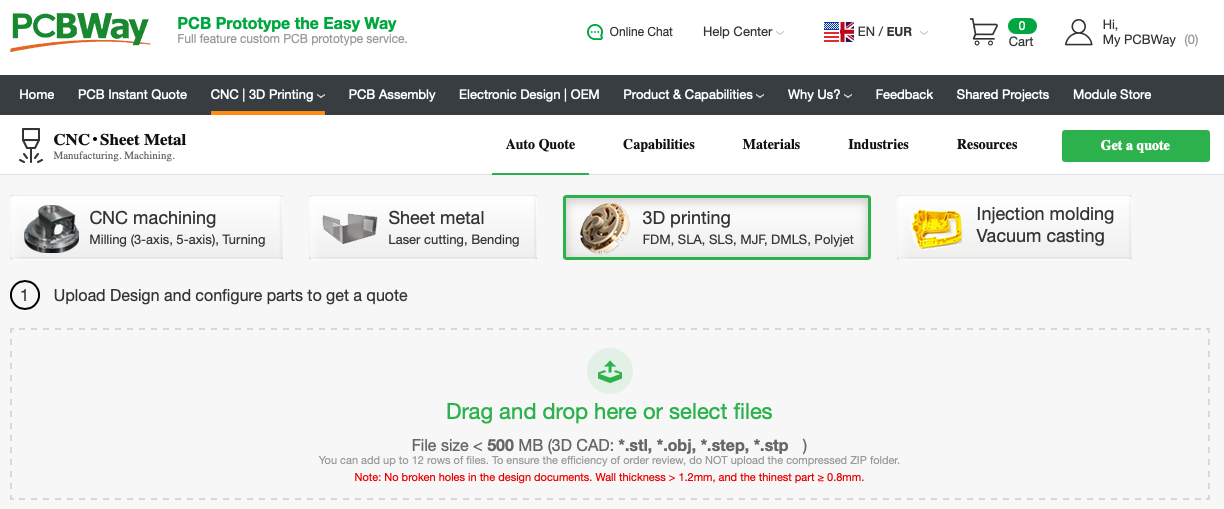
**多种获取方式**:提供完整的 DIY 指南和 BOM,也可从多个供应商处购买零件套件或组装好的成品。
技术规格
| 自由度 | 6 个自由度 (DOF) |
|---|---|
| 驱动方式 | 串行总线舵机 (STS3215) |
| 控制接口 | USB-C (通过电机控制板) |
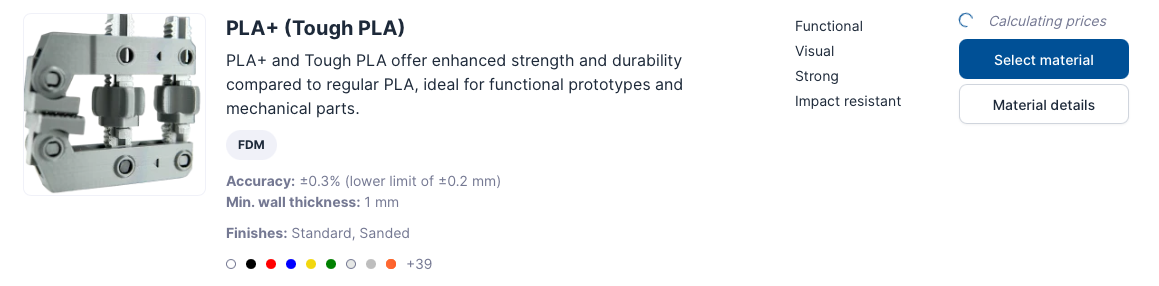
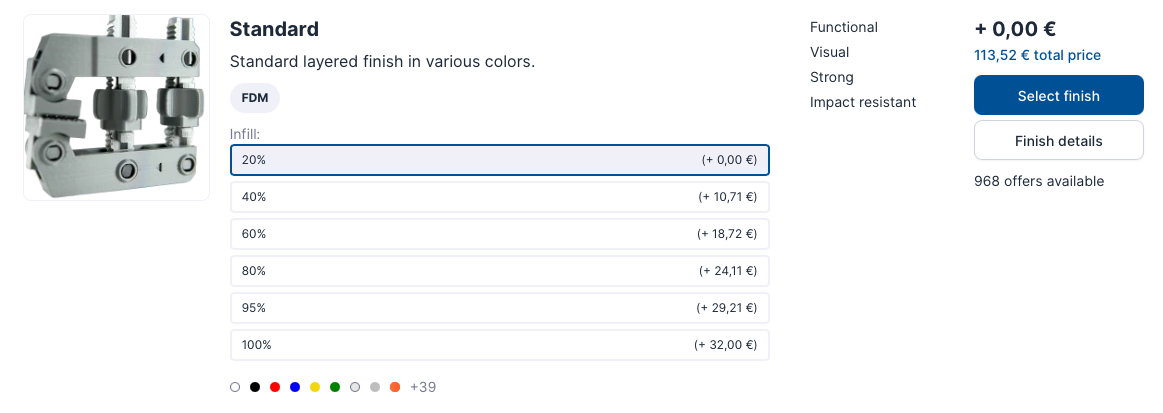
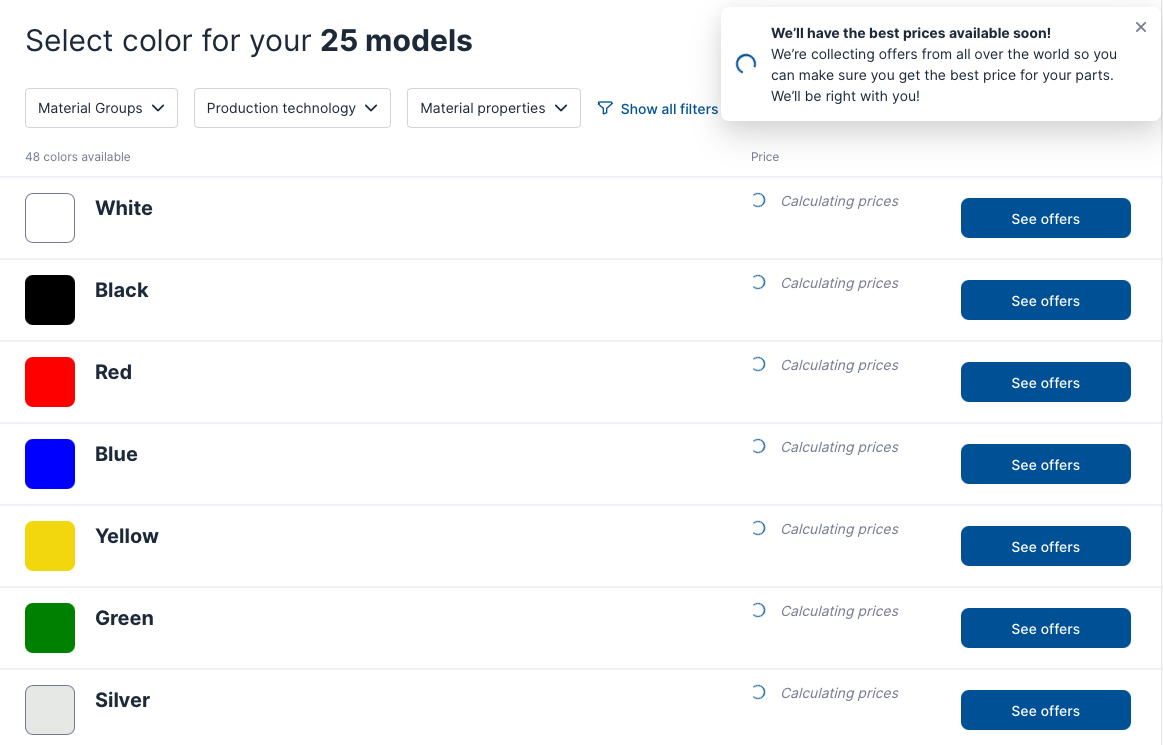
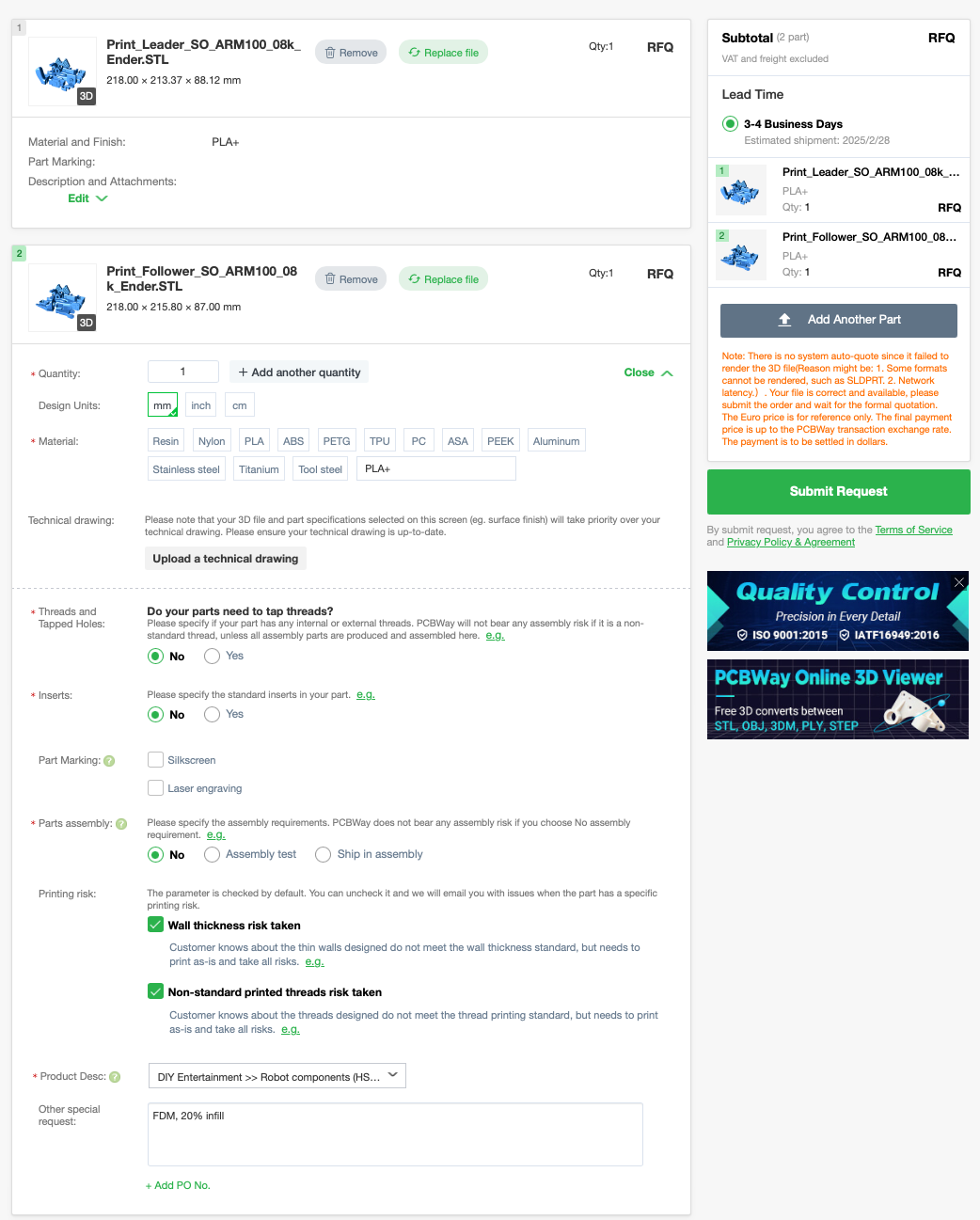
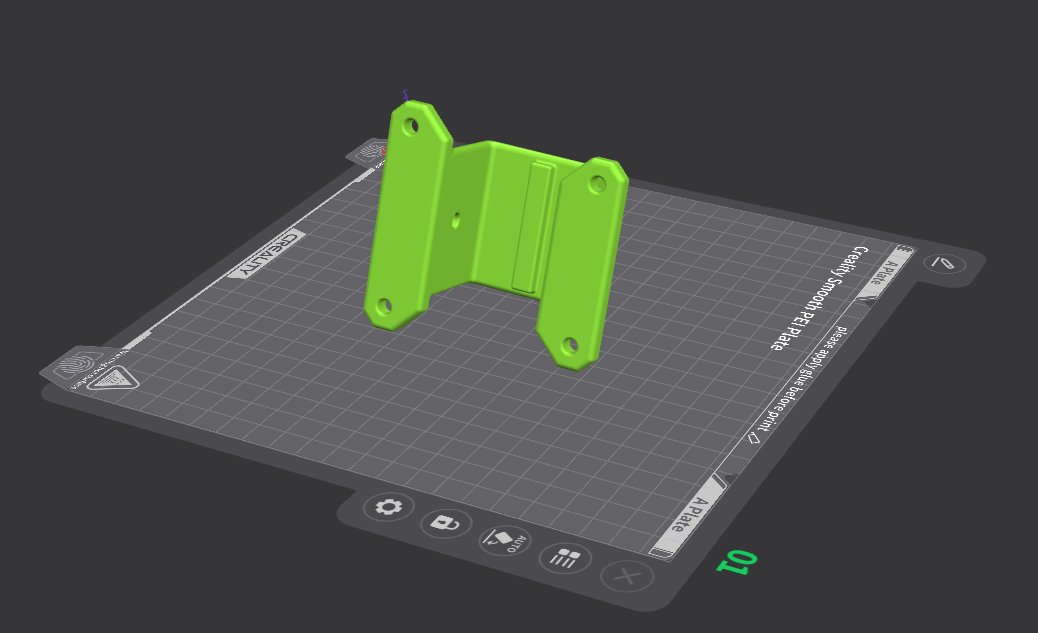
| 主要材料 | 3D打印件 (PLA/PETG) + 标准五金件 |
| 版本 | SO-100 (已弃用) / SO-101 (最新) |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| STS3215 7.4V 1/345齿轮 (C001) | 7 | — | 领导臂1个,从动臂6个 |
| STS3215 7.4V 1/191齿轮 (C044) | 2 | — | 仅领导臂使用 |
| STS3215 7.4V 1/147齿轮 (C046) | 3 | — | 仅领导臂使用 |
| 电机控制板 (如Waveshare) | 2 | — | 每个臂一个 |
| USB-C 数据线 | 2 | — | 用于连接控制板 |
| 5V 电源适配器 | 2 | — | 每个臂一个 |
| 桌面夹具 | 4 | — | 用于固定机械臂 |
| 螺丝刀套装 | 1 | — | 用于组装 |
| 3D打印零件 | 1套 | — | 需自行打印或购买 |
3D 模型
能力画像
⚪ 记忆与知识检索: 1/5
🔵 逻辑推演: 2/5
⚪ 表达与交流: 1/5
⚪ 感知与观察: 2/5
🔵 数理与计算: 2/5
🔵 动手与操作: 4/5
⚪ 狂热与坚持: 3/5
⚪ 创造与创新: 3/5
项目图库










所需技能
🔧 **动手能力**:需要具备一定的动手能力,能够使用螺丝刀、3D打印机等工具进行组装和调试。
💻 **编程能力**:需要基础的Python编程能力,以便设置LeRobot环境、运行数据采集和训练脚本。
⚡ **电子电路**:需要了解基本的电子电路知识,如连接舵机、电源和电机控制板。
适用场景
**机器人研究与教育**:作为低成本平台,用于研究遥操作、模仿学习和机器人控制算法。
**AI数据采集**:用于收集高质量的遥操作数据,训练端到端的机器人AI模型。
**创客与DIY项目**:作为开源硬件项目,供爱好者学习、改装和扩展。
**远程操作应用**:在危险或远程环境中进行简单的物体操作任务。