SEB-Naver: A SE(2)-based Local Navigation Framework for Car-like Robots on Uneven Terrain
seb_naver
四足/人形机器人
1/5
🧩 软硬件结合
已发布
项目简介
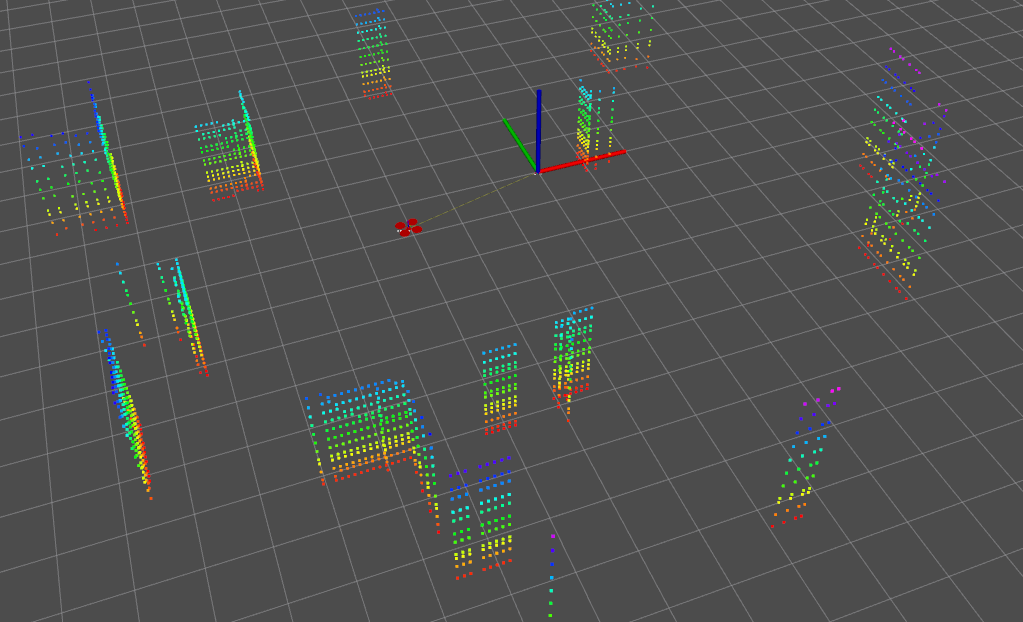
SEB-Naver:基于SE(2)的类车机器人不平地形局部导航框架。
SEB-Naver 是一个面向非平坦地形下类车机器人局部导航的开源框架,基于 SE(2) 位姿空间设计,专门解决轮式机器人在复杂地形中难以兼顾运动约束与地形适应性的问题。该项目由学术论文支撑,并提供了完整的仿真与实车验证视频。
项目特点
基于 SE(2) 的局部导航框架,适用于类车机器人
专门针对不平坦地形进行优化
集成 CasADi 优化库,实现高效运动规划
提供完整的 ROS 仿真环境,支持快速部署与测试
包含学术论文与演示视频,便于理解算法原理
技术规格
| 机器人类型 | 类车机器人 (Car-like Robot) |
|---|---|
| 导航空间 | 2D 平面 (SE(2)) |
| 地形适应性 | 不平坦地形 |
| 依赖框架 | ROS Noetic |
| 优化库 | CasADi |
| 通信协议 | ackermann-msgs |
| 编程语言 | C++ / Python |
| 仿真环境 | Gazebo / RViz |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| ROS Noetic | 1 | — | 运行环境 |
| CasADi | 1 | — | 优化求解器 |
| IPOPT | 1 | — | CasADi 依赖 |
| ackermann-msgs | 1 | — | ROS 消息包 |
3D 模型
能力画像
⚪ 记忆与知识检索: 2/5
🔵 逻辑推演: 4/5
⚪ 表达与交流: 2/5
⚪ 感知与观察: 3/5
🔵 数理与计算: 4/5
🔵 动手与操作: 3/5
⚪ 狂热与坚持: 3/5
🔵 创造与创新: 4/5
项目图库

所需技能
🔧 **动手能力**:需要能够搭建和配置 ROS 开发环境,熟悉 Linux 命令行操作。
💻 **编程能力**:需要掌握 C++ 和 Python,理解 CMake 构建系统,能够阅读和修改运动规划算法代码。
⚡ **电子电路**:无需硬件电路知识,本项目为纯软件仿真。
适用场景
学术研究:作为类车机器人不平坦地形导航算法的基准框架
机器人开发:为类车机器人提供局部导航解决方案
教学演示:用于机器人运动规划与控制课程的教学案例
仿真测试:在 Gazebo 环境中验证导航算法性能