bipedal_wheeled_robot
StackForce双足轮腿机器人开源套件:ESP32主控,3D打印,含教程与代码。
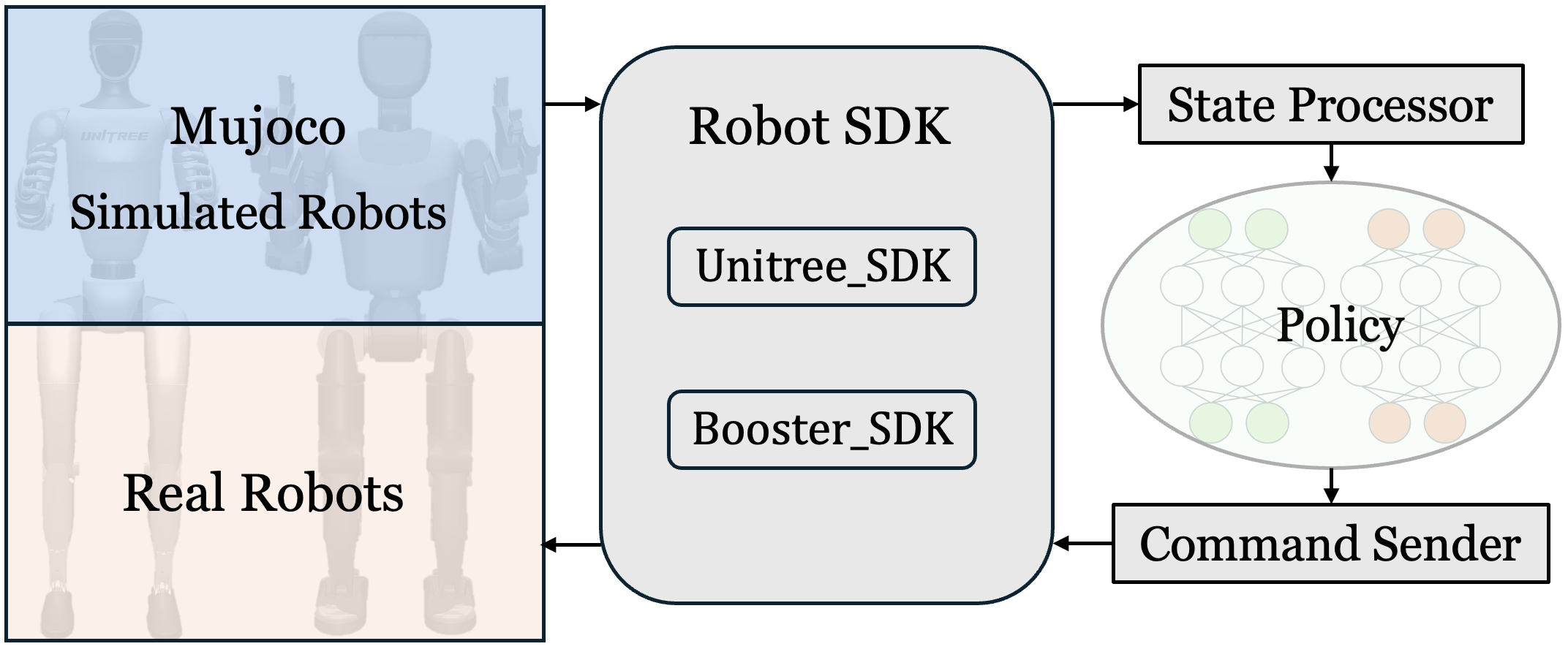
LeCAR-Lab/BFM-Zero
BFM_Zero: A Promptable Behavioral Foundation Model for Humanoid Control Using Unsupervised Reinforcement Learning
dvalenciar/robotic_arm_environment
Doosan robotic arm, simulation, control, visualization in Gazebo and ROS2 for Reinforcement Learning.
noshluk2/ROS2-Ultimate-guide-for-Custom-Robotic-Arms-and-Panda-7-DOF
ROS2 based custom robotic arm with ros2_control
sea-bass/pyroboplan
Educational Python library for manipulator motion planning
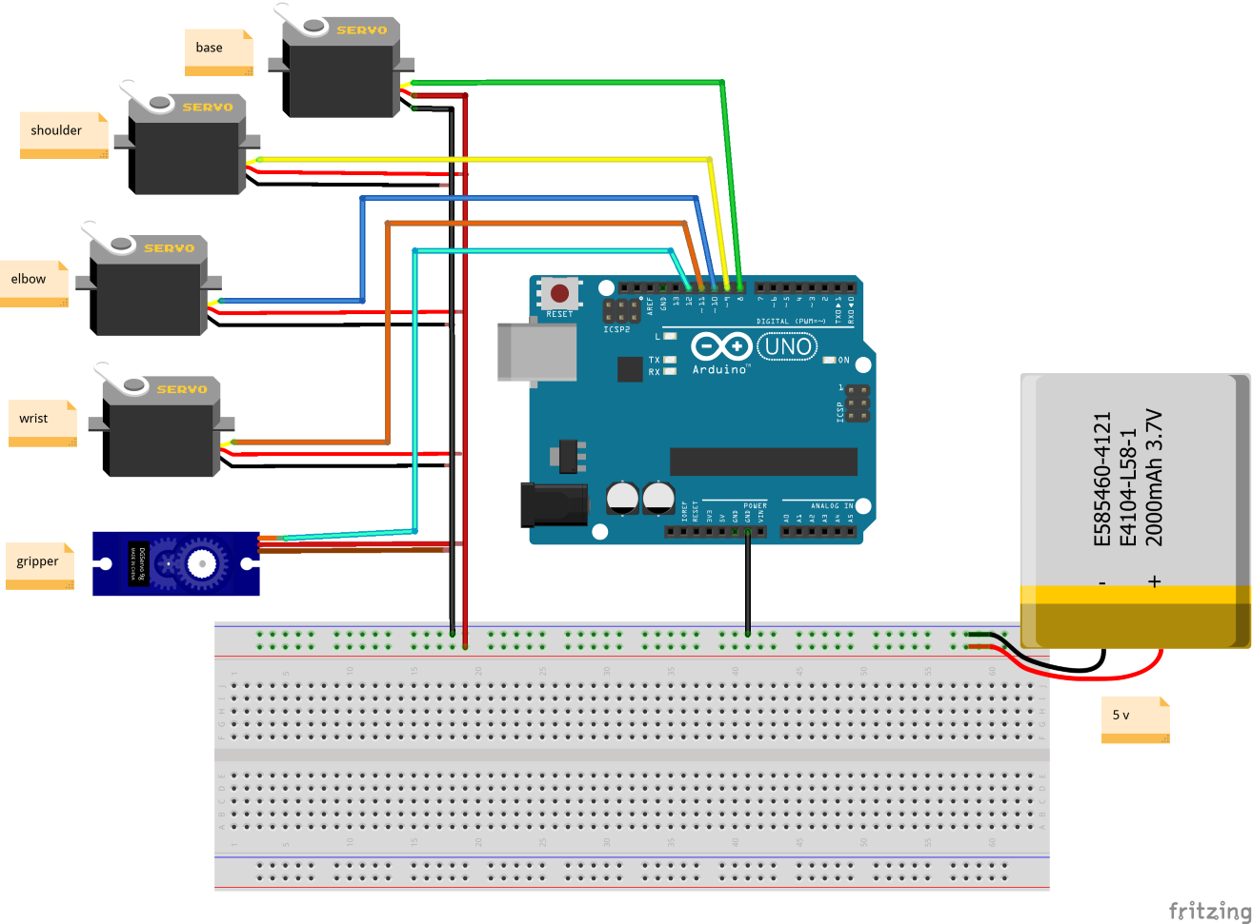
smart-methods/arduino_robot_arm
ROS packages to control an Arduino robot arm by using Moveit
aaedmusa/TOPS
TOPS (Traverser of Planar Surfaces) or "SPOT" backwards is a 3D printed Open Source quadrupedal robot
LeCAR-Lab/FALCON
[L4DC 2026] "FALCON: Learning Force-Adaptive Humanoid Loco-Manipulation"
glumb/mrc
MicroPede robot controller 🤖🖥👾
adamb314/ServoProject
Getting the most out of your hobby servo
pal-robotics/tiago_tutorials
Public tutorials of TIAGo robot
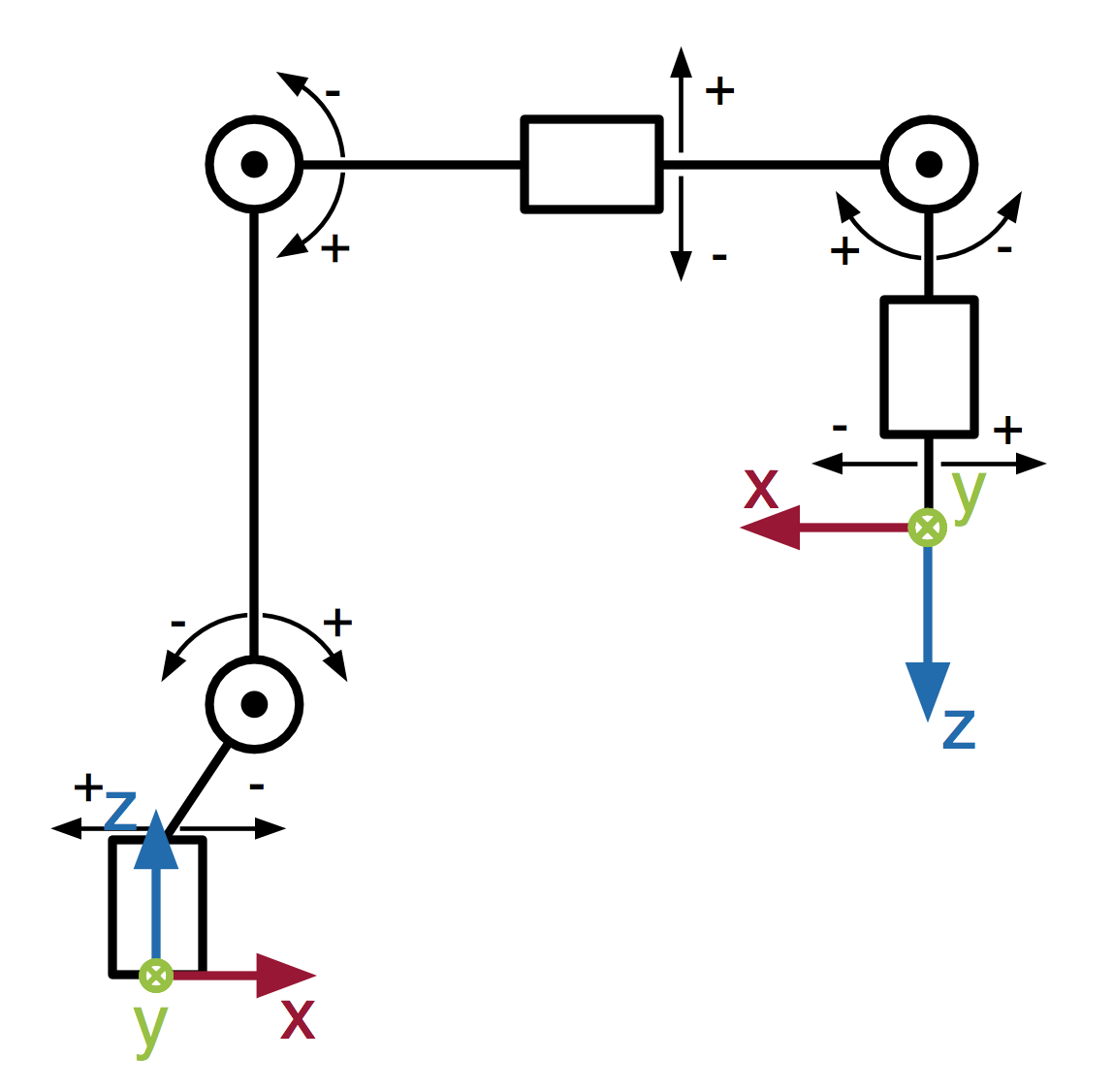
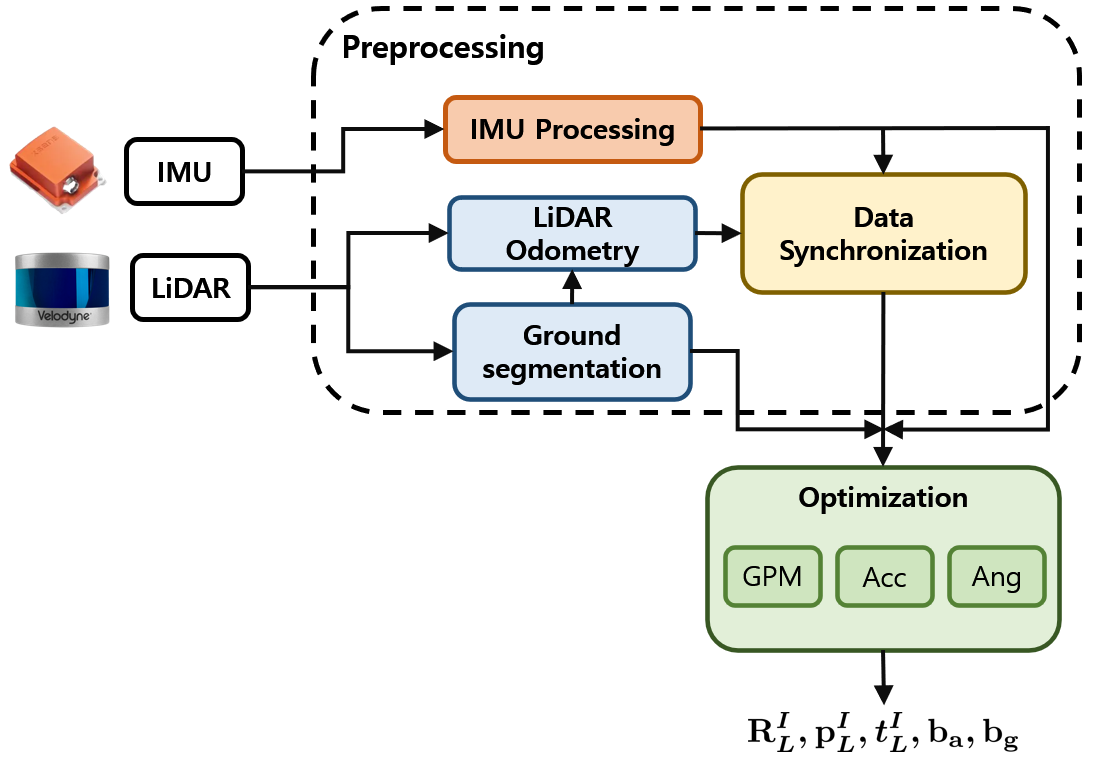
Taeyoung96/GRIL-Calib
[RA-L 2024] GRIL-Calib: Targetless Ground Robot IMU-LiDAR Extrinsic Calibration Method using Ground Plane Motion Constra
epfl-lasa/ridgeback_ur5_controller
Several controllers to move Ridgeback mobile-robot and UR5 robotic-arm.
Robotisim/mobile_robotics_engineer
LEARNING PATH for Robotics Software Engineer . Theory , Programming and Research
botbotrobotics/BotBrain
Modular open-source brain for legged robots. Web UI for teleops, autonomous navigation, mapping & monitoring. 3D-printab
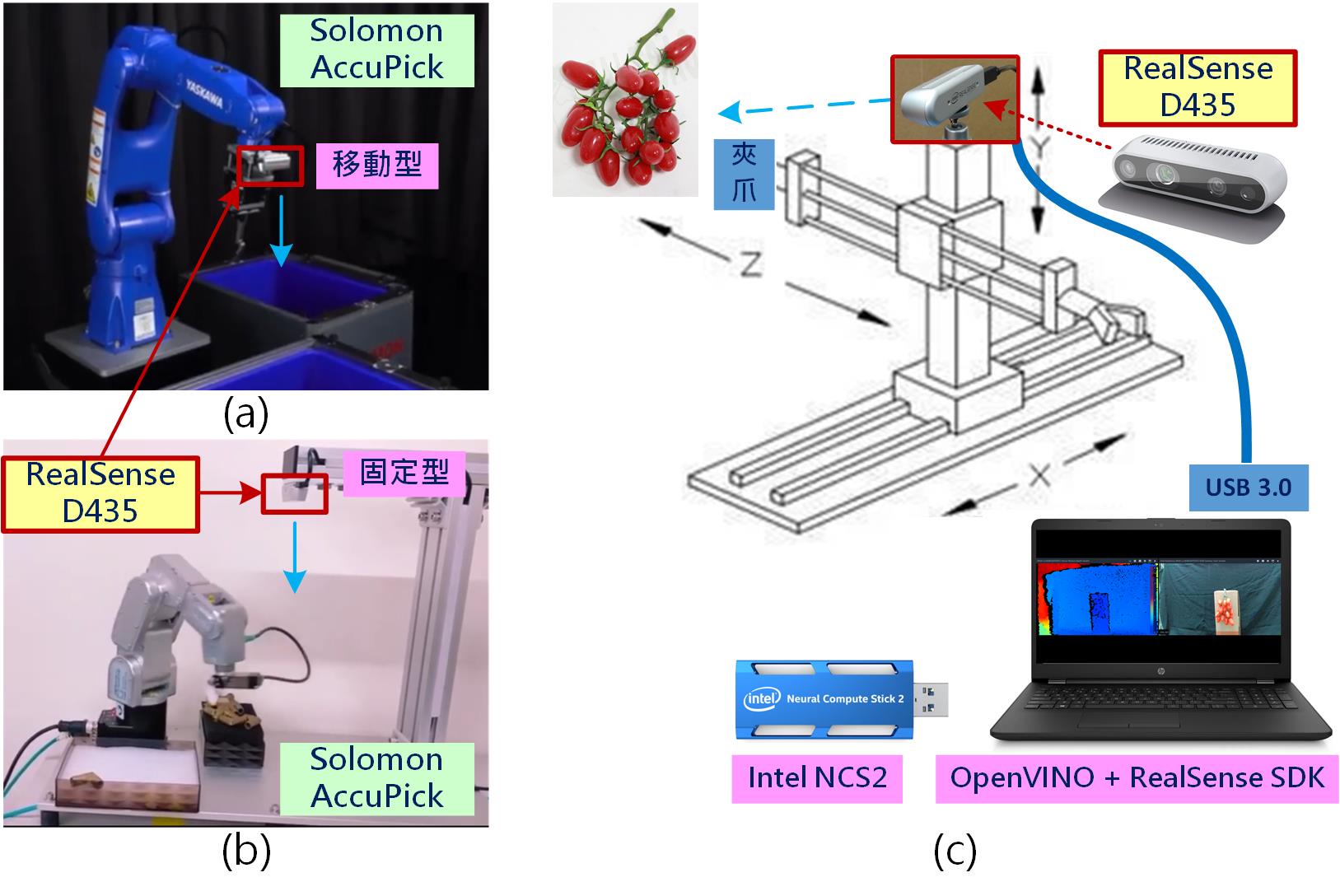
OmniXRI/OpenVINO_RealSense_HarvestBot
土炮智能機器手視覺系統,結合Intel OpenVINO NCS, RealSense D435完成採收小蕃茄直交式機器手臂視覺系統概念機。
openroberta-lab
Open Roberta Lab让青少年编程机器人。
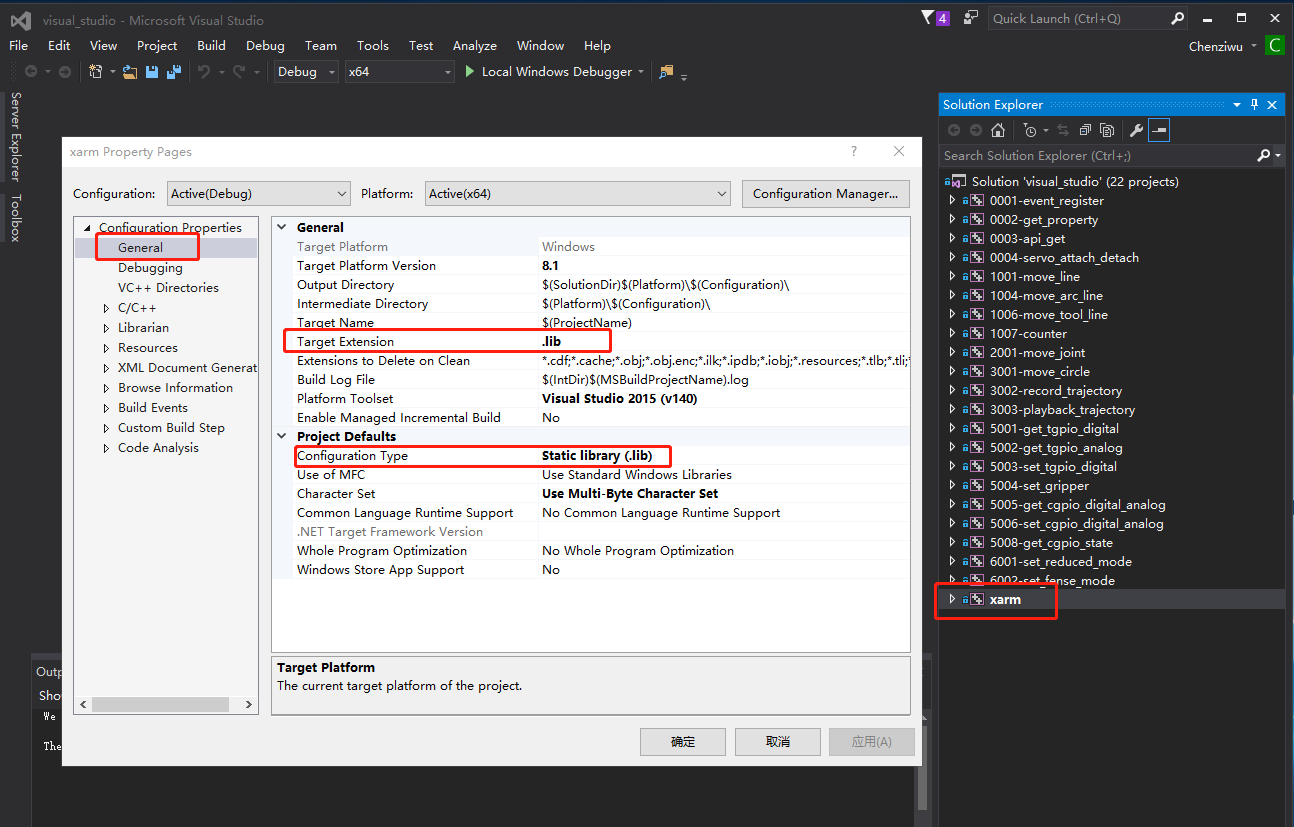
xArm-Developer/xArm-CPLUS-SDK
C++ SDK for UFACTORY robots, 850, xArm5/6/7, and Lite6.
uos/katana_driver
This stack contains hardware drivers, Gazebo plugins and other basic functionalities for the Neuronics Katana family of
ian-chuang/Manipulator-Mujoco
Base Mujoco Gymnasium environment for easily controlling any robot arm with operational space control. Built with dm-con