待补充
sea-bass/pyroboplan
机器人
3/5
🧩 软硬件结合
已发布
项目简介
Educational Python library for manipulator motion planning
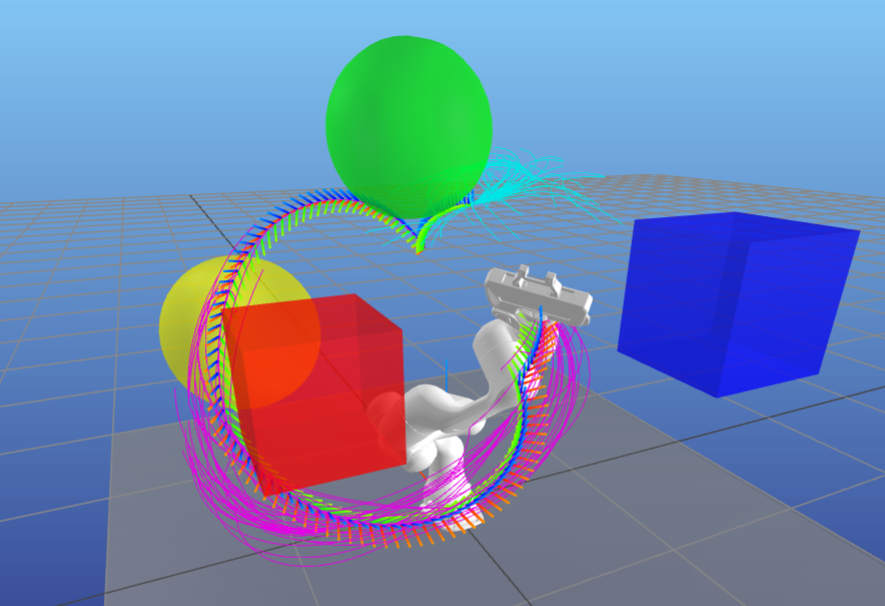
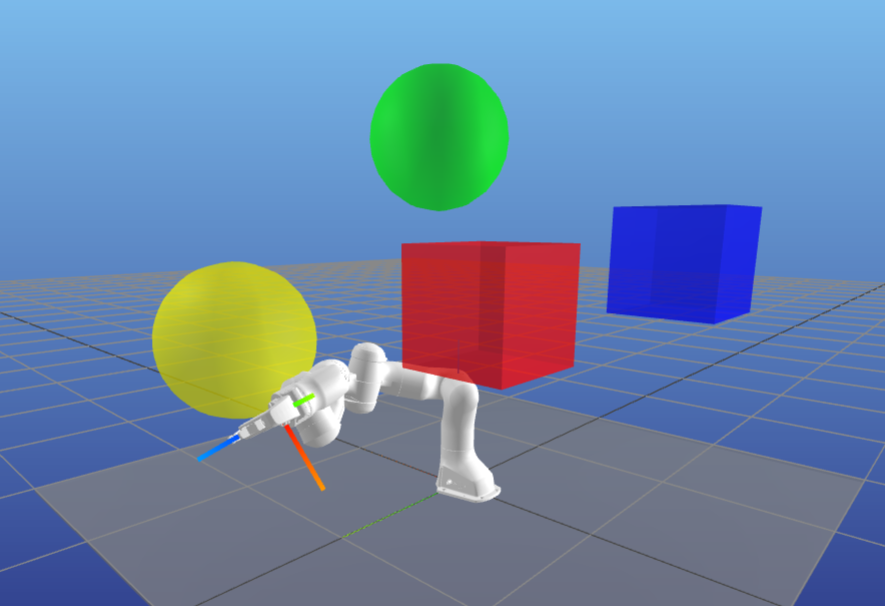
PyRoboPlan 是一个专注于机械臂运动规划的教育型 Python 开源库,由 Sebastian Castro 于 2024 年发起并持续维护。该项目旨在通过简洁清晰的代码实现,帮助机器人领域的学习者和研究者理解运动规划的核心算法与原理。它深度集成了 Pinocchio 库的 Python 绑定,用于机器人运动学与动力学的建模与计算,从而能够高效地处理关节空间与笛卡尔空间中的规划问题。核心功能包括基于快速随机搜索树(RRT)的路径规划、笛卡尔空间运动规划以及轨迹执行的可视化演示。项目通过直观的 GIF 示例展示了从规划到执行的全流程,让用户能够快速看到算法效果。PyRoboPlan 主要解决了现有工业级运动规划库(如 RoboPlan)对初学者门槛较高的问题,它刻意保持轻量化和教学导向,适合在课堂实验、个人学习或算法原型验证等场景中使用。技术栈上以 Python 为主,依赖 Pinocchio 进行底层计算,并集成了测试与文档工具以确保代码质量。需要注意的是,该项目明确声明仅用于教育目的,对于需要高可靠性和性能的生产环境,官方建议转向更成熟的 RoboPlan 等库。
标签
项目特点
**教育导向设计**:代码结构清晰、注释丰富,专为机器人运动规划的学习者设计,降低入门门槛。
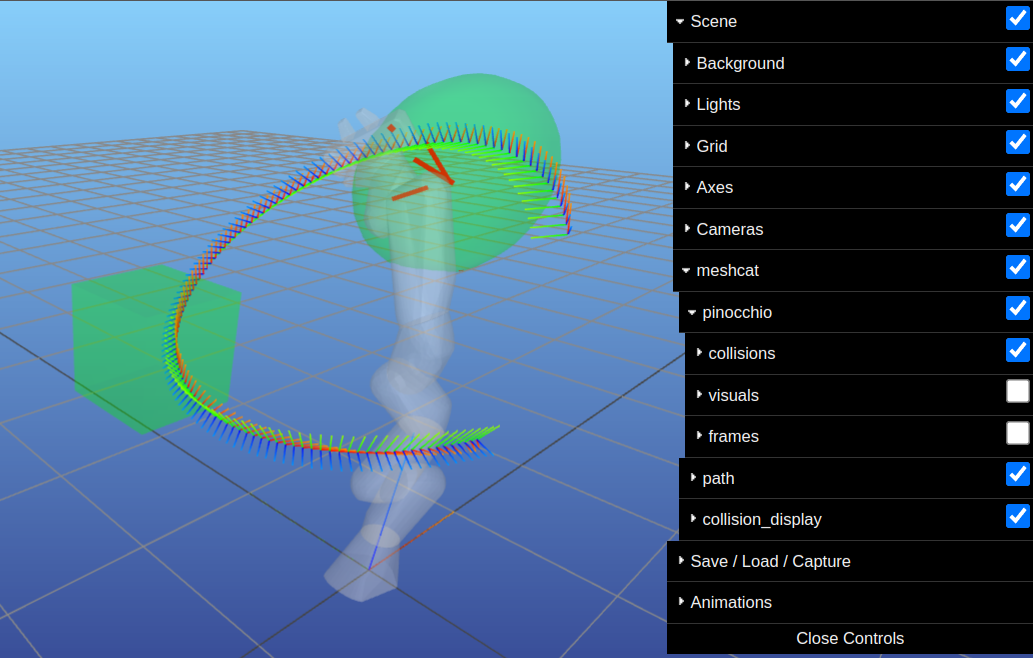
**深度集成 Pinocchio**:利用 Pinocchio 库的 Python 绑定进行运动学与动力学建模,确保规划结果在真实机器人模型上的准确性。
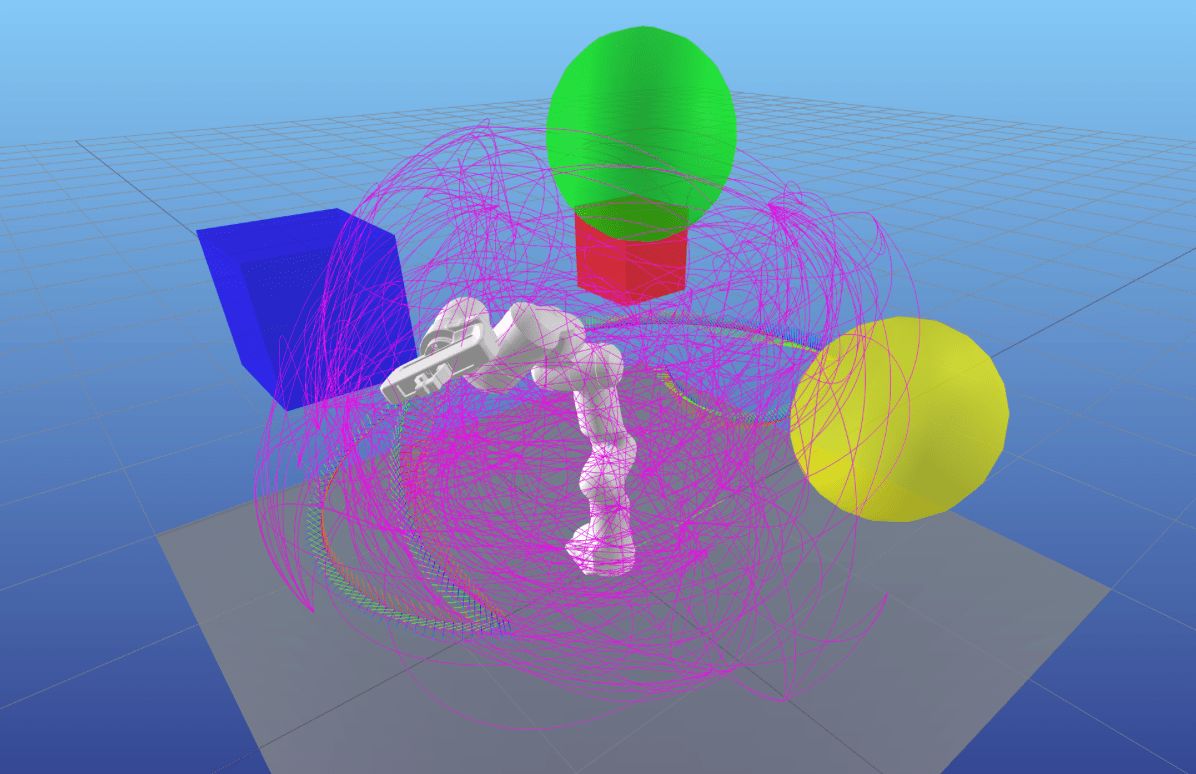
**支持 RRT 路径规划**:实现了基于快速随机搜索树(RRT)的关节空间路径规划算法,适合处理高维空间中的避障问题。
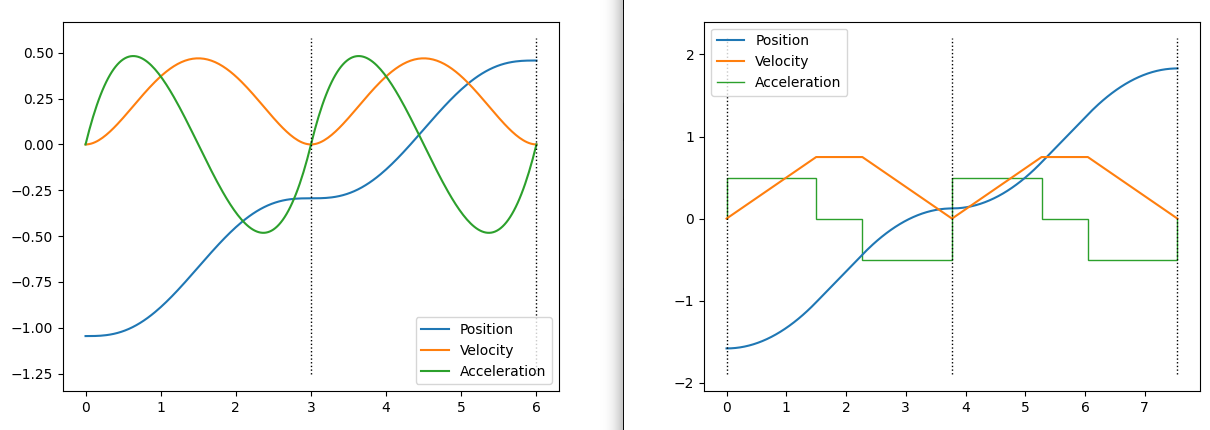
**笛卡尔空间规划**:支持在笛卡尔空间中进行运动规划,方便用户直接指定末端执行器的目标位姿。
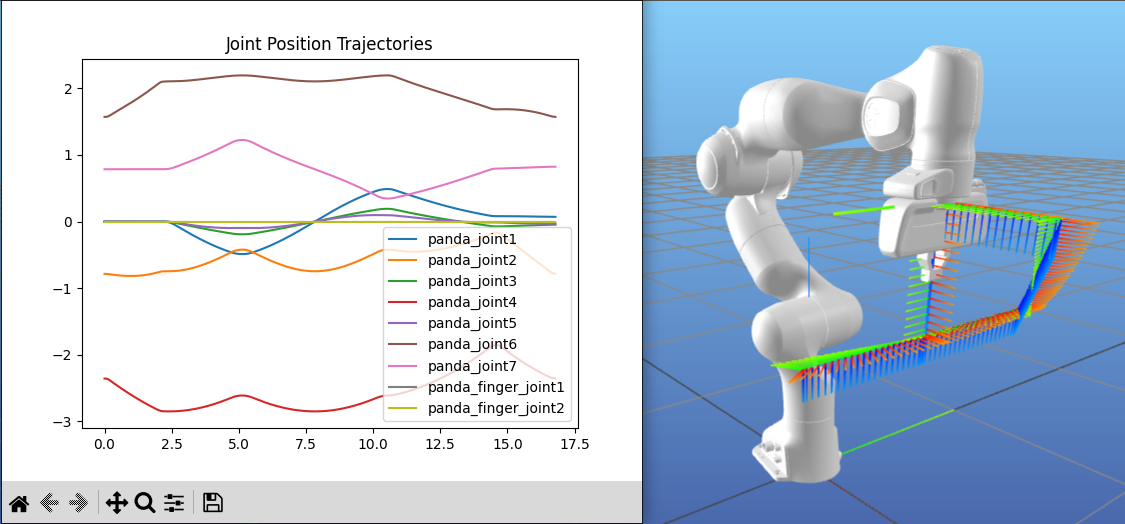
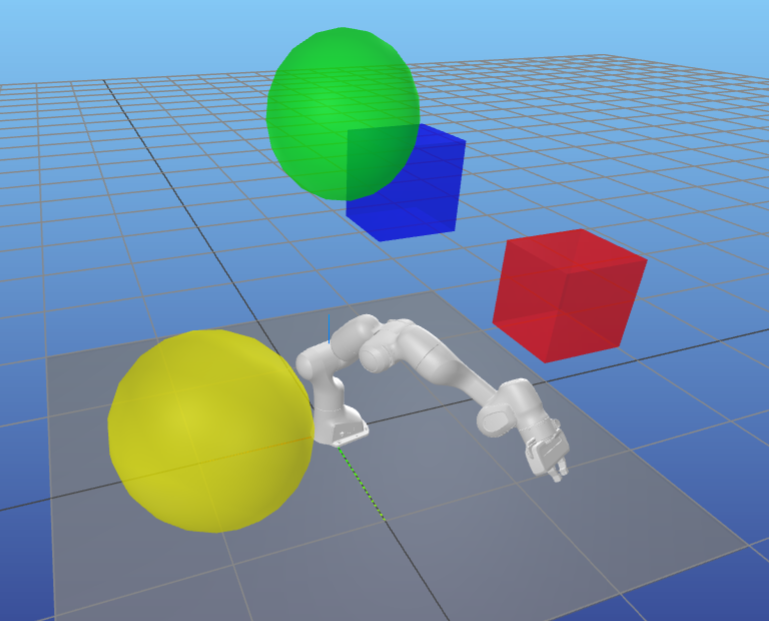
**可视化演示**:提供直观的 GIF 和图形化示例,展示从规划到轨迹执行的全流程,便于理解算法效果。
**轻量且可扩展**:代码量适中,易于修改和扩展,适合作为教学示例或进一步研究的基础。
技术规格
| 编程语言 | |
|---|---|
| 核心依赖 | |
| 支持机器人模型 | |
| 规划算法 | |
| 规划空间 | |
| 可视化工具 | |
| 操作系统支持 | |
| 项目起始年份 | |
| 维护状态 | |
| GitHub 星数 |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| Python 3 | 1 | — | 运行环境 |
| Pinocchio | 1 | — | 运动学/动力学库 |
| NumPy | 1 | — | 数值计算 |
| Matplotlib | 1 | — | 可视化 |
| 其他 Python 包 | 若干 | — | 见 requirements.txt |
| 无特定硬件要求 | - | — | 纯软件项目,可在普通计算机上运行 |
3D 模型
能力画像
**记忆与知识检索**:2/5 — 项目本身不涉及知识库或检索功能,但文档和代码注释提供了算法原理的参考。
**动手与操作**:3/5 — 需要用户手动安装依赖、运行示例脚本,并通过修改参数观察规划效果,有一定动手操作成分。
**编程与算法**:4/5 — 核心是运动规划算法的 Python 实现,用户需要理解 RRT 等算法逻辑,并可自行修改代码进行实验。
**设计与建模**:3/5 — 通过 Pinocchio 加载 URDF 模型进行运动学建模,但项目不涉及从零开始设计机器人模型。
**实验与调试**:4/5 — 支持快速修改规划参数、测试不同场景,并通过可视化结果调试算法表现。
**协作与分享**:2/5 — 开源项目,可通过 GitHub 提交 Issue 或 Pull Request,但社区规模较小。
**学习与研究**:5/5 — 项目定位为教育型库,非常适合学习运动规划基础算法和机器人学原理。
**系统集成**:2/5 — 作为独立库使用,不直接提供与 ROS 或其他机器人框架的集成接口,但可手动集成。
项目图库



所需技能
Python 编程基础
机器人学基础知识(运动学、动力学概念)
理解路径规划算法(如 RRT)的基本原理
使用 Git 进行版本控制(推荐)
基本的命令行操作(安装依赖、运行脚本)
阅读英文技术文档的能力
适用场景
机器人学课程中运动规划章节的教学演示与实验
个人学习机械臂运动规划算法的入门实践
快速原型验证 RRT 等规划算法在关节空间或笛卡尔空间的效果
作为机器人运动规划研究的代码基础,进行算法改进或对比实验
机器人爱好者探索开源机器人软件栈的入门项目