搜索 "planning" 找到 17 个结果
A Robust and Efficient Trajectory Planner for Quadrotors
[CVPR 2023 Best Paper Award] Planning-oriented Autonomous Driving
MoveIt运动规划框架。
Central repository for tools, tutorials, resources, and documentation for robotics simulation in Unity.
基于Timed-Elastic-Bands的移动机器人最优轨迹规划器(ROS Pac)
Quadrotor control, path planning and trajectory optimization
Teach-Repeat-Replan: A Complete and Robust System for Aggressive Flight in Complex Environments
An Efficient Framework for Fast UAV Exploration
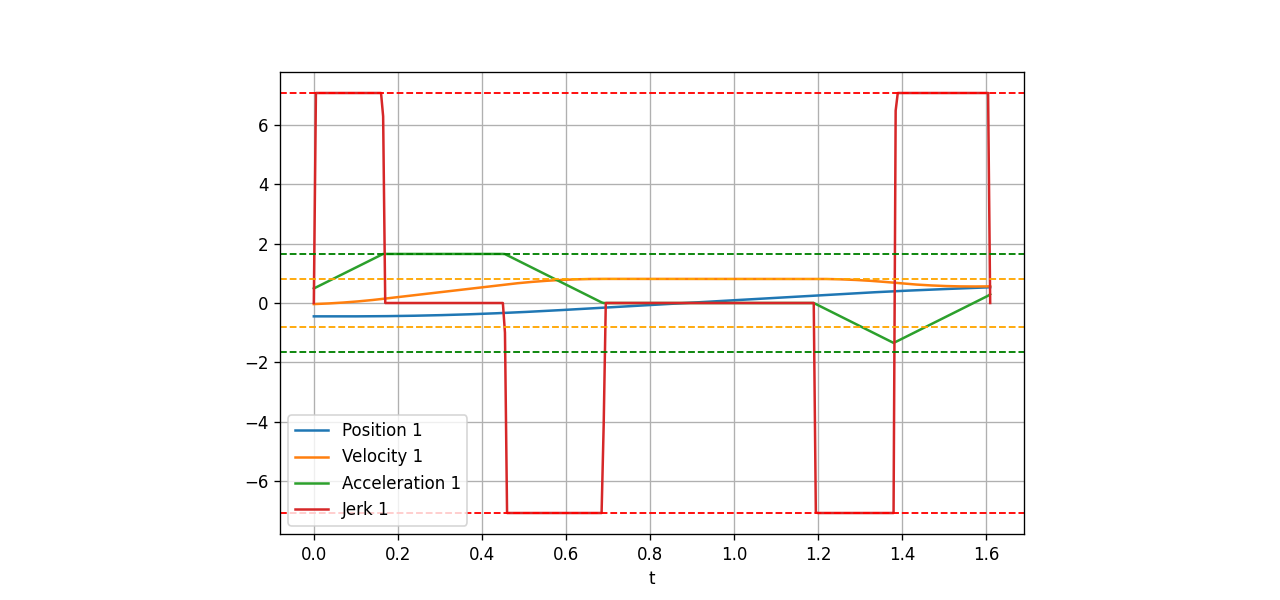
Motion Generation for Robots and Machines. Real-time. Jerk-constrained. Time-optimal.
3D Trajectory Planner in Unknown Environments
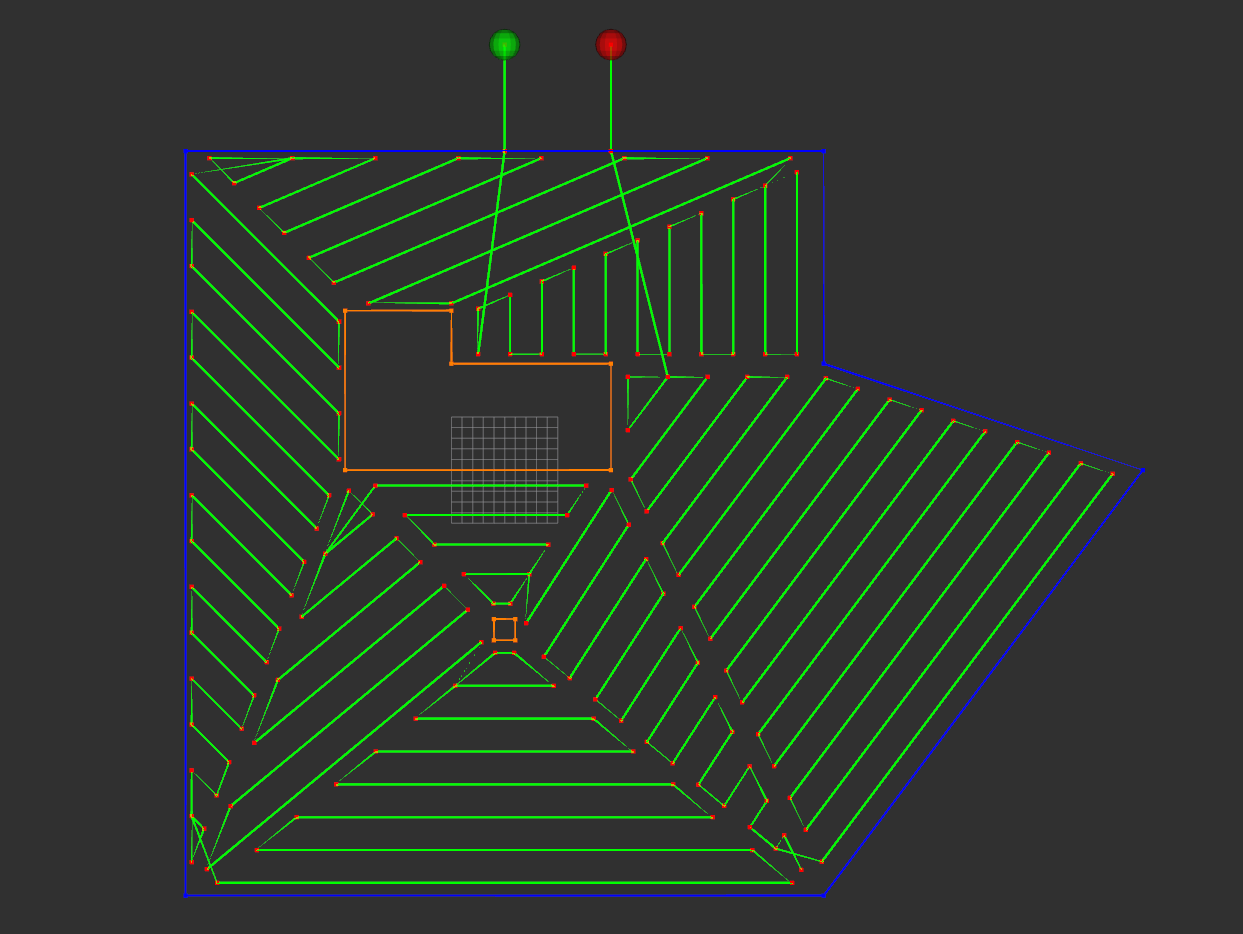
Coverage planning in general polygons with holes.
Modular framework for online informative path planning.
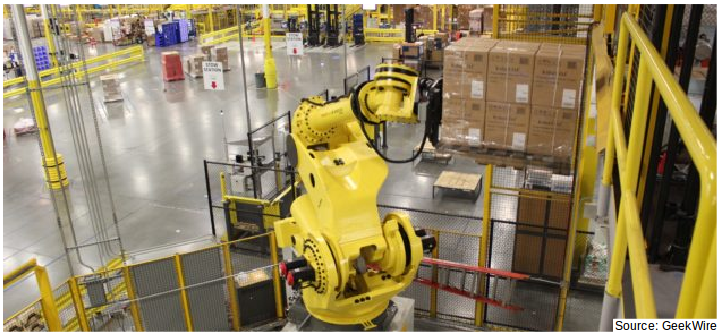
Object picking and stowing with a 6-DOF KUKA Robot using ROS
Whole-Body Nonlinear MPC for Realtime Humanoid Loco-Manipulation Planning and Control
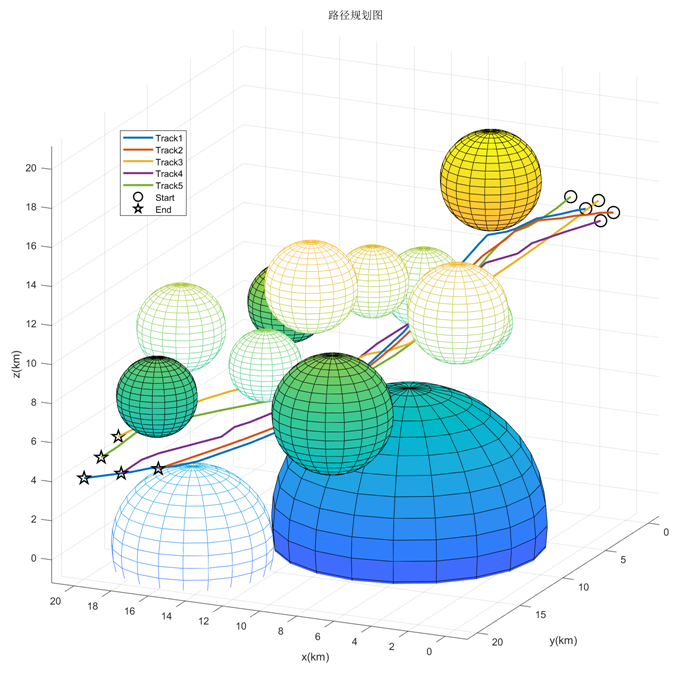
灰狼优化算法(GWO)路径规划/轨迹规划/轨迹优化、多智能体/多无人机航迹规划
Educational Python library for manipulator motion planning
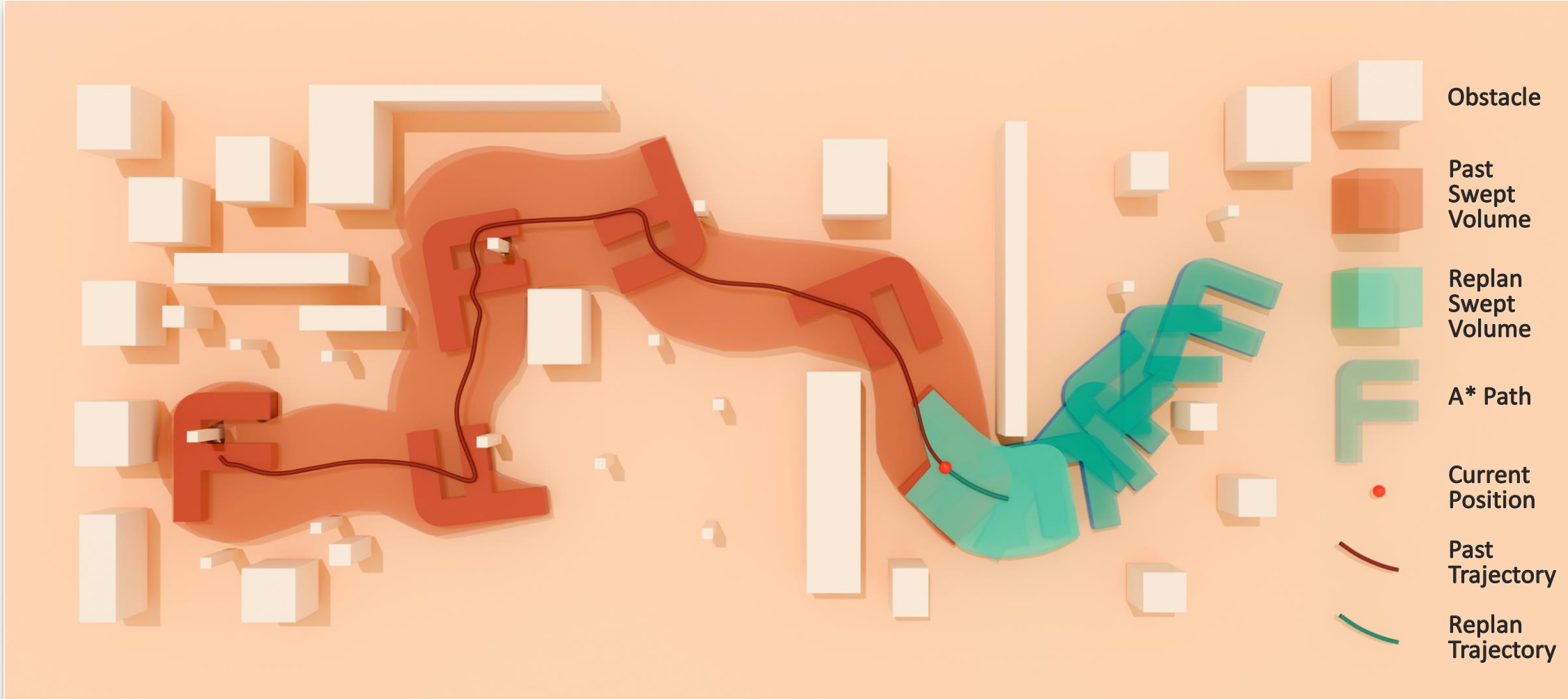
通过SVSDF实现任意形状实时重规划。