待补充
ethz-asl/mav_active_3d_planning
飞控/无人机
3/5
🧩 软硬件结合
已发布
项目简介
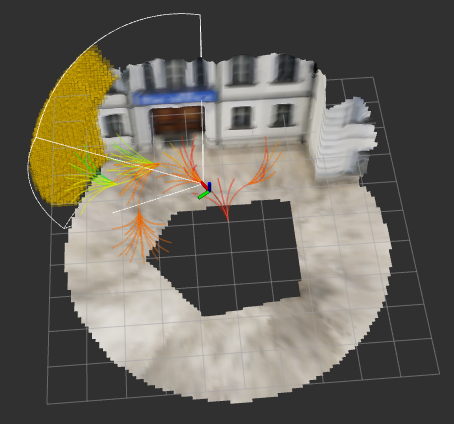
Modular framework for online informative path planning.
mav_active_3d_planning 是由瑞士苏黎世联邦理工学院(ETH Zurich)自动系统实验室(ASL)开发的一个模块化在线信息路径规划(IPP)框架,专门用于微小型飞行器(MAV)在未知环境中的自主探索与三维重建任务。该项目主要解决无人机在未知、复杂环境中如何高效规划飞行路径以最大化信息获取的问题,适用于自主探索、三维重建、环境监测等场景。
标签
项目特点
**模块化架构**:框架采用高度模块化设计,用户可以灵活替换或定制规划器、成本函数、信息增益计算等组件,适应不同任务需求。
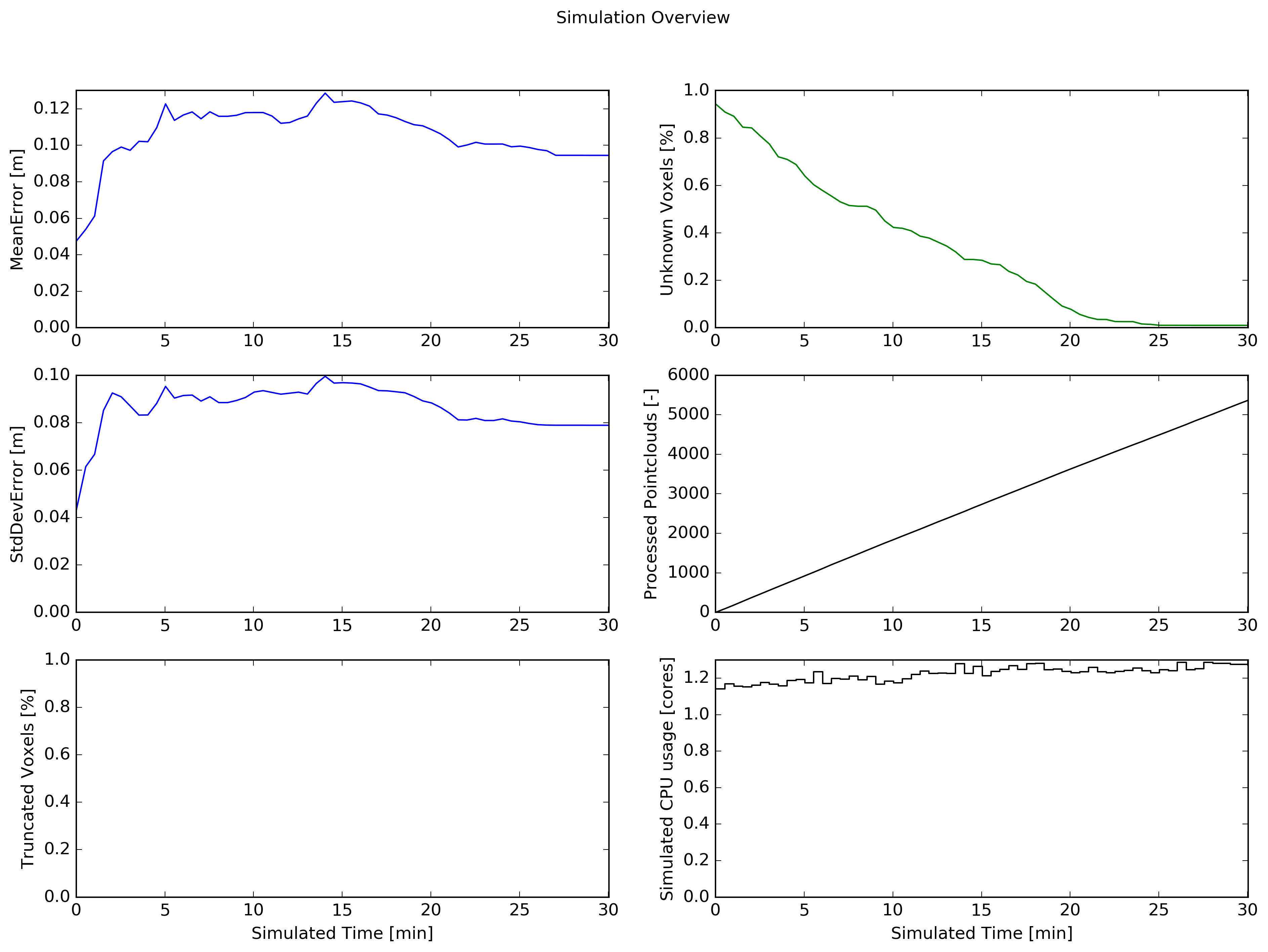
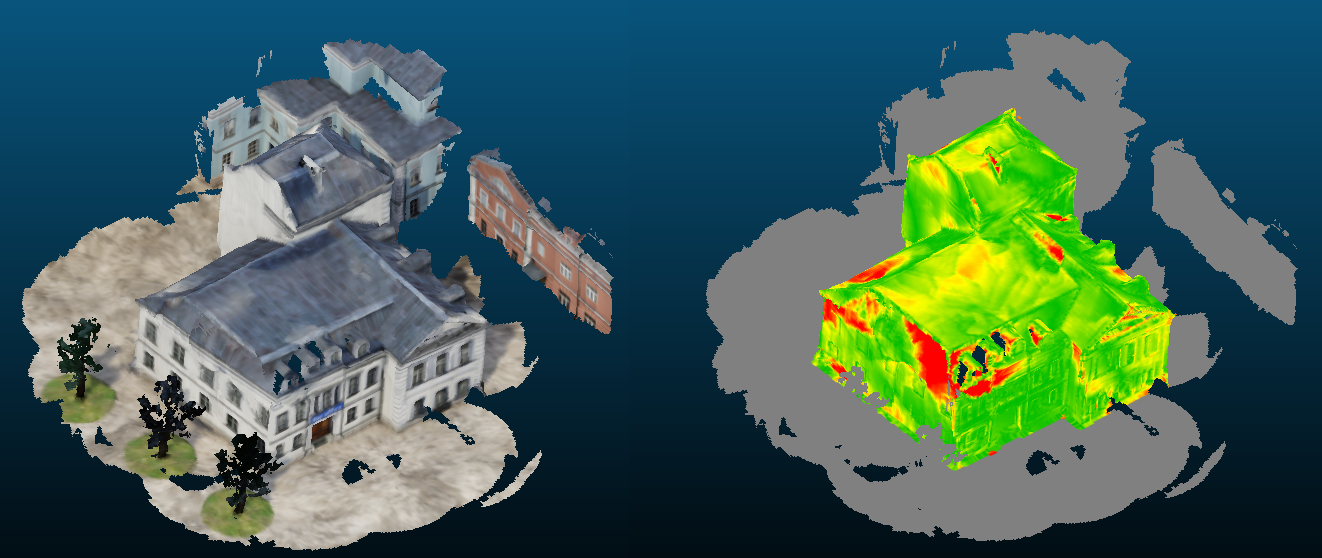
**在线实时规划**:支持在飞行过程中动态重新规划路径,根据最新传感器数据实时调整飞行轨迹,确保信息获取最大化。
**多传感器支持**:兼容多种深度传感器(如RGB-D相机、激光雷达等),并能处理不同传感器模型带来的不确定性。
**多种规划策略**:内置多种路径规划算法,包括基于RRT*、局部规划、全局探索等策略,用户可根据场景选择或组合。
**集成仿真环境**:提供与Gazebo、RViz等仿真工具的接口,支持在真实飞行前进行算法验证和参数调优。
**开源社区活跃**:项目在GitHub上拥有460+星标,有详细的文档和示例,便于二次开发和学术研究。
技术规格
| 开发语言 | |
|---|---|
| 依赖框架 | |
| 支持ROS版本 | |
| 支持无人机平台 | |
| 传感器类型 | |
| 规划频率 | |
| 地图表示 | |
| 路径规划算法 | |
| 信息增益计算 | |
| 仿真环境 | |
| 操作系统 |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| 多旋翼无人机平台 | 1 | — | 如DJI Matrice 100/600或自组装四旋翼 |
| 机载计算机 | 1 | — | 如Intel NUC或NVIDIA Jetson TX2 |
| RGB-D深度相机 | 1 | — | 如Intel RealSense D435 |
| 激光雷达(可选) | 1 | — | 如Velodyne VLP-16 |
| 飞控板 | 1 | — | 如Pixhawk或DJI A3 |
| GPS模块(可选) | 1 | — | 用于室外定位 |
| Ubuntu操作系统 | 1 | — | 16.04/18.04/20.04 |
| ROS | 1 | — | Kinetic/Melodic/Noetic |
| Voxblox | 1 | — | 用于体素地图构建 |
| Octomap | 1 | — | 可选,用于八叉树地图 |
| Gazebo仿真器 | 1 | — | 用于仿真测试 |
| RViz | 1 | — | 用于可视化 |
能力画像
**记忆与知识检索**:2/5 — 项目本身不涉及知识库或检索功能,但文档和Wiki提供了必要的技术参考。
**动手与操作**:4/5 — 需要组装调试无人机硬件、配置传感器、进行实际飞行测试,动手要求较高。
**编程与算法**:5/5 — 核心是C++实现的路径规划与信息增益算法,需要较强的编程和算法理解能力。
**设计与建模**:3/5 — 涉及传感器模型、环境地图建模,但主要是使用现有框架进行配置。
**实验与调试**:4/5 — 需要大量仿真和实际飞行实验来调参,调试过程复杂且依赖日志分析。
**协作与分享**:3/5 — 开源项目支持社区贡献,但主要面向研究团队,协作门槛较高。
**学习与研究**:5/5 — 项目本身是前沿研究产物,需要阅读论文、理解信息论和路径规划理论。
**系统集成**:4/5 — 需要将飞控、机载计算机、传感器、ROS系统等多个软硬件模块集成在一起。
项目图库



所需技能
C++编程(核心)
ROS(机器人操作系统)使用与开发
路径规划算法基础(RRT*、A*等)
三维重建与地图构建概念
无人机飞控与硬件调试
Linux系统操作与命令行
Git版本控制
传感器标定与数据融合
仿真环境(Gazebo)使用
英文技术文档阅读能力
适用场景
未知环境自主探索与测绘
室内外三维重建与建模
灾害现场快速勘察与建模
农业植保中的作物三维监测
工业设施巡检与数字孪生
科研教学中的路径规划算法验证
无人机自主导航与避障研究
环境监测与变化检测