待补充
Salman-H/pick-place-robot
机器人
3/5
🧩 软硬件结合
已发布
项目简介
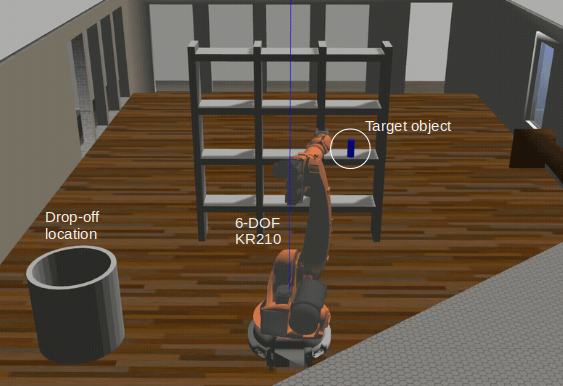
Object picking and stowing with a 6-DOF KUKA Robot using ROS
这是一个基于机器人操作系统(ROS)开发的开源项目,核心目标是实现六自由度KUKA KR210工业机械臂的自主抓取与放置操作。项目通过完整的运动学求解与仿真验证,解决了在非结构化环境中机械臂如何精准定位目标、规划无碰撞路径并完成抓取任务这一工业机器人领域的经典难题。
标签
项目特点
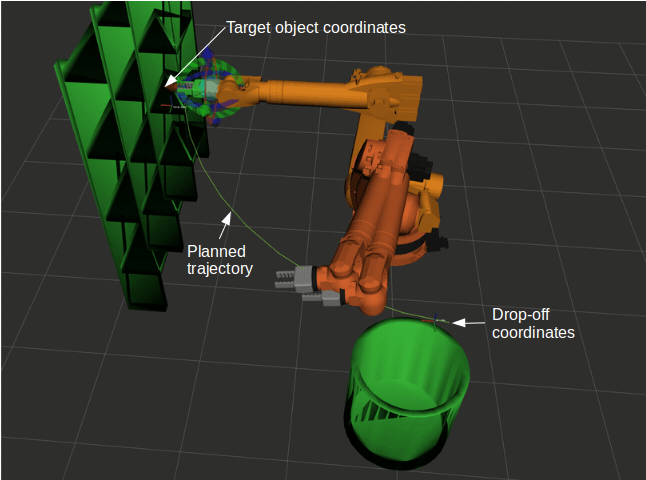
**完整运动学求解**:实现了KUKA KR210的正向和逆向运动学算法,让机械臂能准确计算每个关节的角度。
**ROS集成**:基于ROS框架开发,可以方便地与其他ROS组件(如MoveIt、Rviz)协同工作。
**仿真验证**:在Gazebo或Rviz中提供完整的仿真环境,无需真实硬件即可测试抓取逻辑。
**自主抓取流程**:从目标检测、路径规划到抓取执行,形成一套闭环的自主操作流程。
**模块化设计**:代码结构清晰,各功能模块(运动学、规划、控制)独立,便于修改和扩展。
**开源社区支持**:GitHub上有332颗星,社区活跃,文档和示例代码齐全。
技术规格
| 机械臂型号 | |
|---|---|
| 自由度 | |
| 最大工作半径 | |
| 额定负载 | |
| 控制系统 | |
| 运动学求解器 | |
| 路径规划库 | |
| 仿真环境 | |
| 编程语言 | |
| 支持操作系统 |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| KUKA KR210机械臂 | 1 | — | 六自由度工业机械臂 |
| 夹爪/末端执行器 | 1 | — | 需自行选型或3D打印 |
| 工控机/PC | 1 | — | 运行ROS和仿真环境 |
| Ubuntu操作系统 | 1 | — | 推荐16.04或18.04 LTS |
| ROS Kinetic/Melodic | 1 | — | 机器人操作系统 |
| MoveIt | 1 | — | 运动规划库 |
| Gazebo | 1 | — | 物理仿真环境 |
| Rviz | 1 | — | 可视化工具 |
3D 模型
能力画像
**记忆与知识检索**:3/5 — 需要查阅ROS文档和运动学公式,但项目本身提供了完整代码参考。
**动手与操作**:4/5 — 如果有真实机械臂,需要接线、调试和校准;纯仿真则动手需求较低。
**编程与算法**:5/5 — 核心是C++和Python编程,涉及运动学求解、路径规划算法,编程量较大。
**设计与建模**:2/5 — 机械臂模型已提供,主要工作是理解现有模型,无需大量新设计。
**实验与调试**:4/5 — 需要反复调试运动学参数、碰撞检测和抓取逻辑,仿真和实物调试都很关键。
**协作与分享**:3/5 — 项目开源,可以提交Issue或PR,但社区规模中等,协作机会一般。
**学习与研究**:5/5 — 非常适合学习ROS、运动学、工业机器人控制,是很好的教学和研究平台。
**系统集成**:4/5 — 需要将ROS、MoveIt、Gazebo、硬件驱动等多个子系统整合在一起。
项目图库




视频
所需技能
机器人操作系统(ROS)基础
C++或Python编程能力
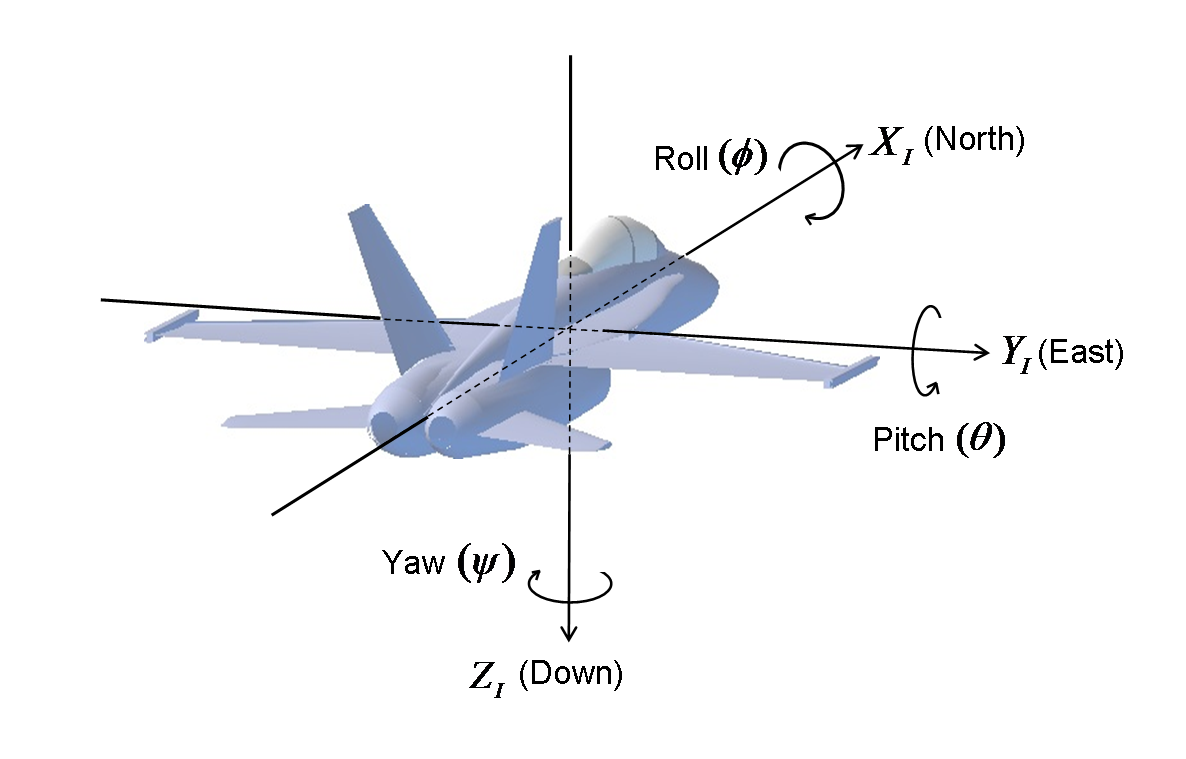
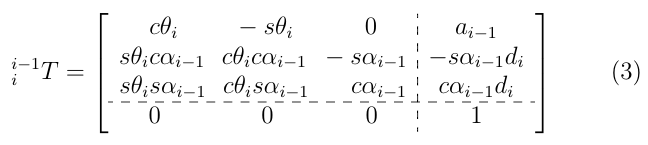
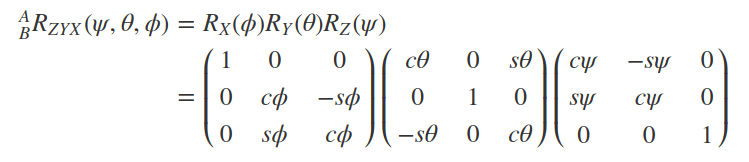
机器人运动学(正向/逆向)理解
基本线性代数与几何知识
Linux命令行操作
机械臂控制与路径规划概念
仿真环境(Gazebo/Rviz)使用经验
版本控制(Git)基础
适用场景
高校机器人课程实验与教学
工业机器人自主抓取技术研究
基于ROS的机械臂控制开发入门
运动学与路径规划算法验证
智能制造与自动化产线原型设计
机器人竞赛(如RoboCup、ICRA挑战赛)技术储备
个人机器人爱好者学习与改装