Ruckig
ruckig
机器人
3/5
🧩 软硬件结合
已发布

项目简介
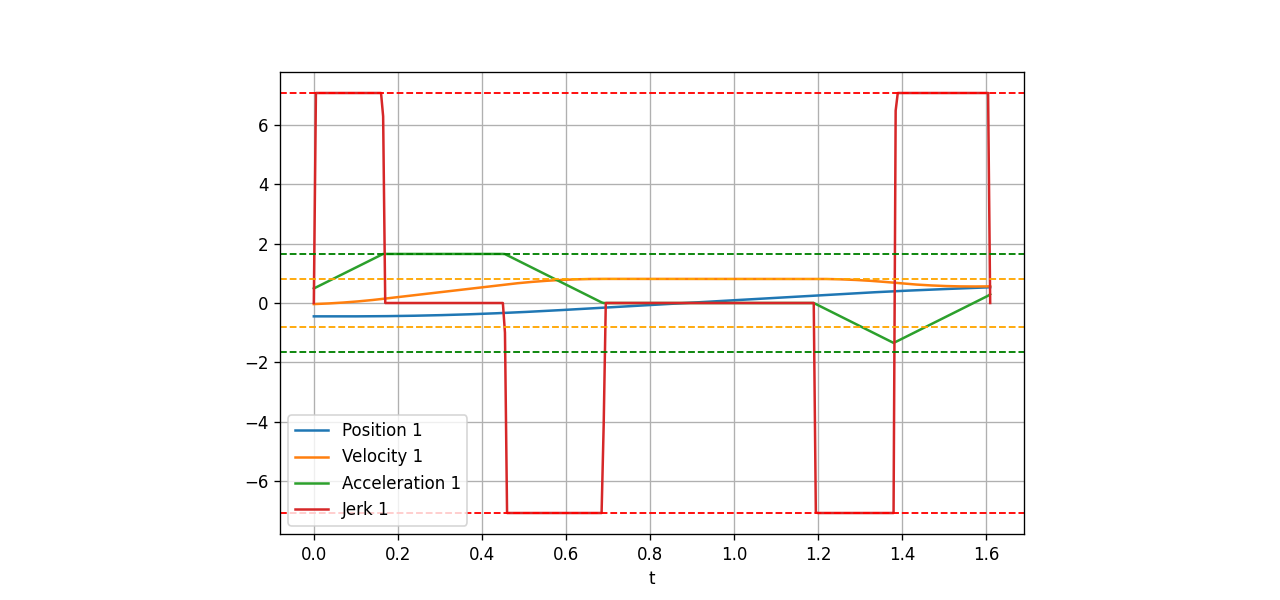
Motion Generation for Robots and Machines. Real-time. Jerk-constrained. Time-optimal.
Ruckig 是一个专为机器人和自动化设备设计的实时运动轨迹生成库,其核心能力是在极短时间内计算出满足运动学约束的平滑轨迹。该项目由 Pantor 团队开发,采用 MIT 开源协议,目前已在 GitHub 上获得广泛关注。
标签
项目特点
**实时性**:可在控制循环内逐时间步计算轨迹,支持对传感器输入的即时响应
**加加速度约束**:生成平滑的 jerk-limited 轨迹,避免加速度突变
**时间最优**:对于状态到状态的运动,保证时间最优解
**中间路径点**:支持定义中间位置进行路径点跟随,联合优化路径和时间
**多自由度同步**:支持多个自由度的相位同步、时间同步或不同步
**灵活的控制接口**:支持位置控制和速度控制两种接口
**无外部依赖**:核心库仅依赖 C++ 标准库,易于集成
技术规格
| 支持自由度 | 任意数量(模板参数指定) |
|---|---|
| 控制周期 | 用户指定(如 0.001s) |
| 约束类型 | 速度、加速度、加加速度(jerk) |
| 目标状态 | 位置、速度、加速度 |
| 同步模式 | 相位同步、时间同步、不同步 |
| 控制接口 | 位置控制、速度控制 |
| 编程语言 | C++ (C++17), Python |
| 许可证 | MIT |
| 依赖 | 无(测试除外) |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| Ruckig 库 | 1 | — | 无外部依赖 |
| CMake | 1 | — | 构建工具 |
| Python (可选) | 1 | — | 用于 Python 模块 |
能力画像
⚪ 记忆与知识检索: 1/5
🔵 逻辑推演: 4/5
⚪ 表达与交流: 1/5
⚪ 感知与观察: 1/5
🔵 数理与计算: 5/5
🔵 动手与操作: 2/5
⚪ 狂热与坚持: 2/5
🔵 创造与创新: 3/5
项目图库
所需技能
🔧 **动手能力**:基本的 C++ 编译和 CMake 构建能力,能够将库集成到现有机器人控制系统中
💻 **编程能力**:需要 C++ 编程经验,理解模板编程和实时系统概念;Python 用户需了解 pip 安装和基本 API 使用
⚡ **电子电路**:不需要,纯软件库
适用场景
工业机器人轨迹规划与控制
协作机器人(cobot)的实时运动生成
自动化设备的平滑运动控制
视觉伺服(visual servoing)中的即时轨迹调整
多轴同步运动控制(如 CNC、3D 打印机)
人机协作场景中需要不同速度限制的应用