MoveIt 运动规划框架
moveit
ROS
1/5
🧩 软硬件结合
已发布
项目简介
MoveIt运动规划框架。
MoveIt 是 ROS(机器人操作系统)生态中最成熟、应用最广泛的开源运动规划框架,专为机械臂等机器人操作任务设计。它的核心价值在于将复杂的运动规划、逆运动学求解、碰撞检测、路径优化等底层算法封装成一套易用的工具链,让开发者无需从零编写运动学代码,即可快速为机器人添加自主抓取、避障移动、轨迹规划等高级功能。
项目特点
**运动规划**:集成了多种运动规划算法(如OMPL、CHOMP、STOMP),支持复杂环境下的无碰撞路径规划。
**逆运动学求解**:提供多种IK求解器接口,支持自定义求解器。
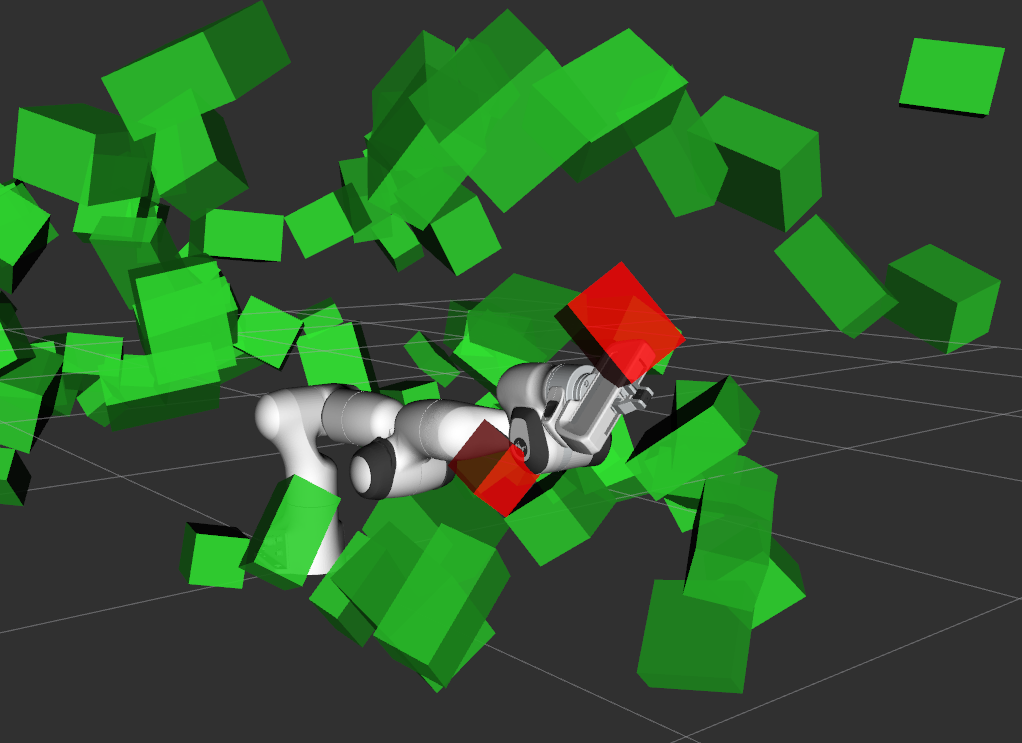
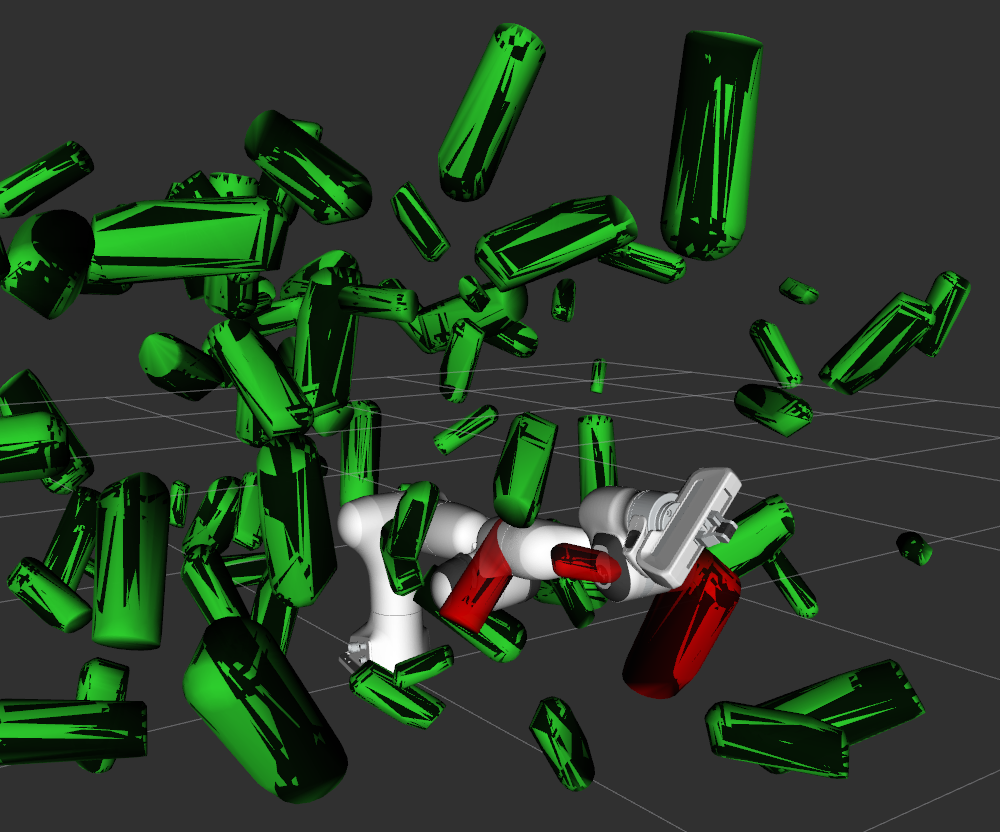
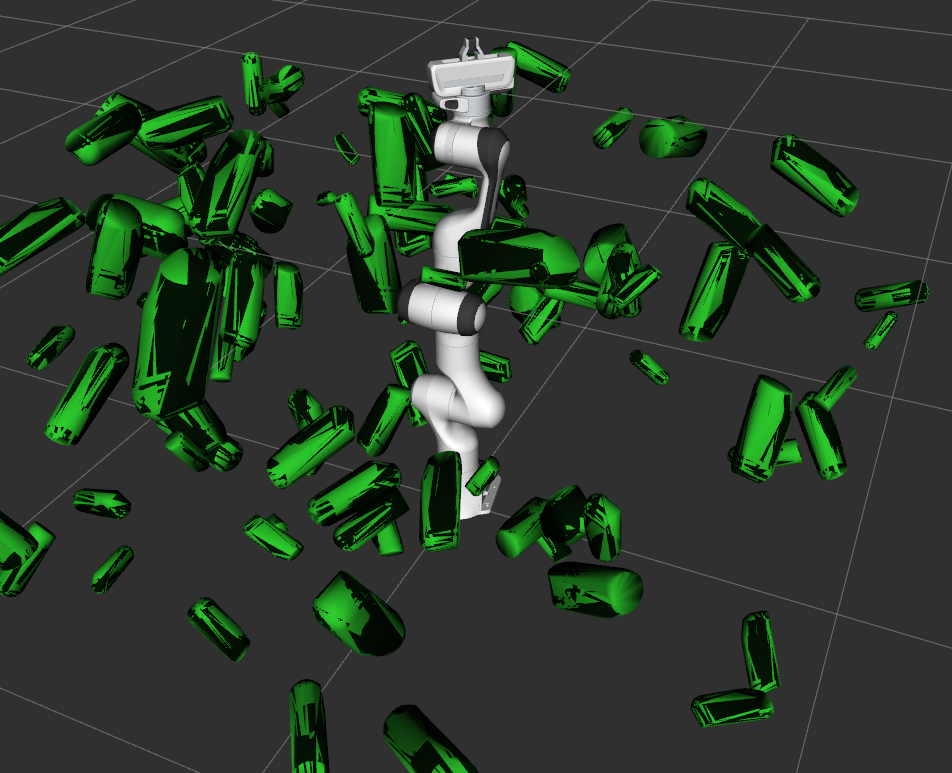
**碰撞检测**:利用FCL(Flexible Collision Library)进行高效碰撞检测,支持自碰撞和环境碰撞。
**3D感知集成**:可与深度相机、激光雷达等传感器集成,进行环境建模和物体识别。
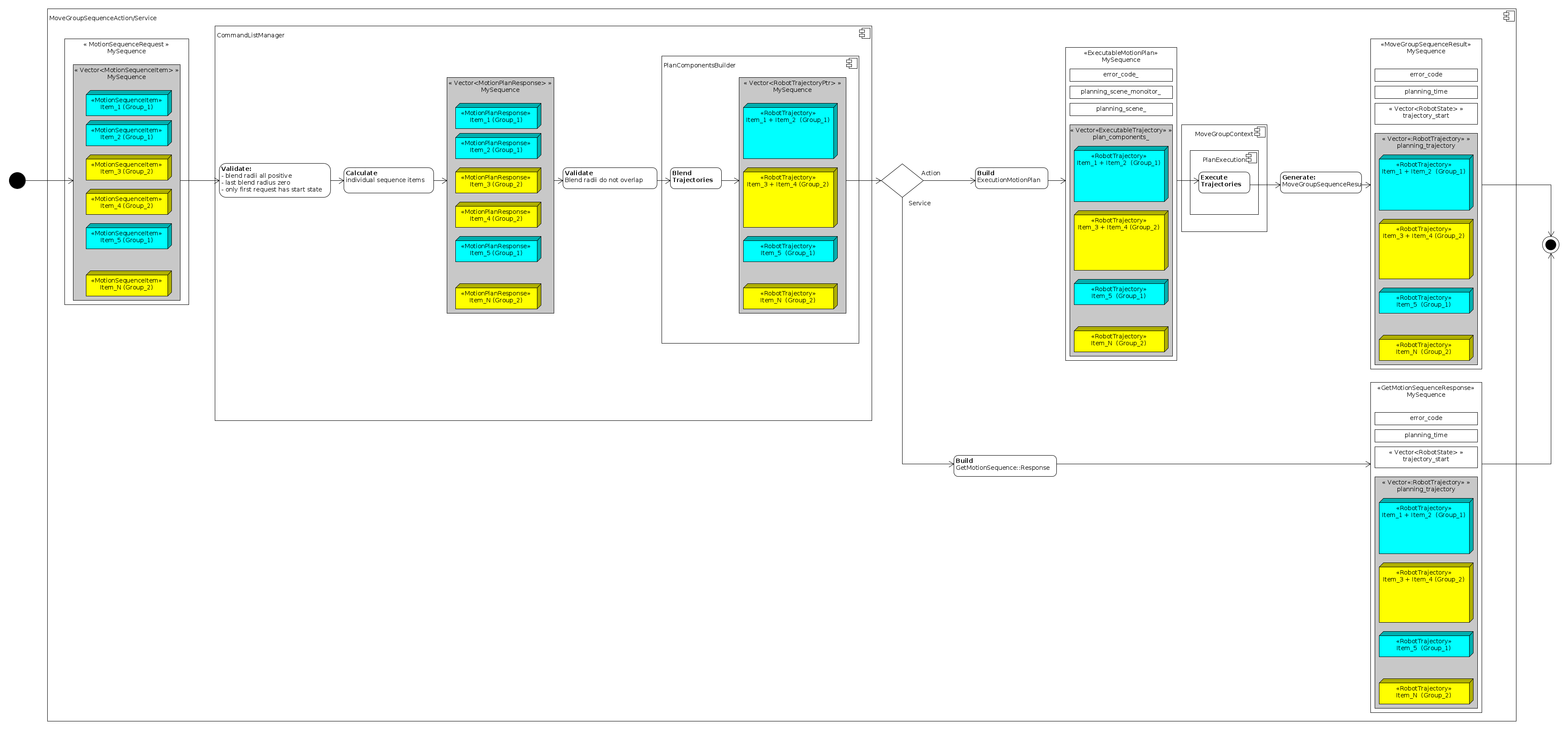
**ROS集成**:深度集成ROS消息、服务和动作,提供丰富的ROS接口。
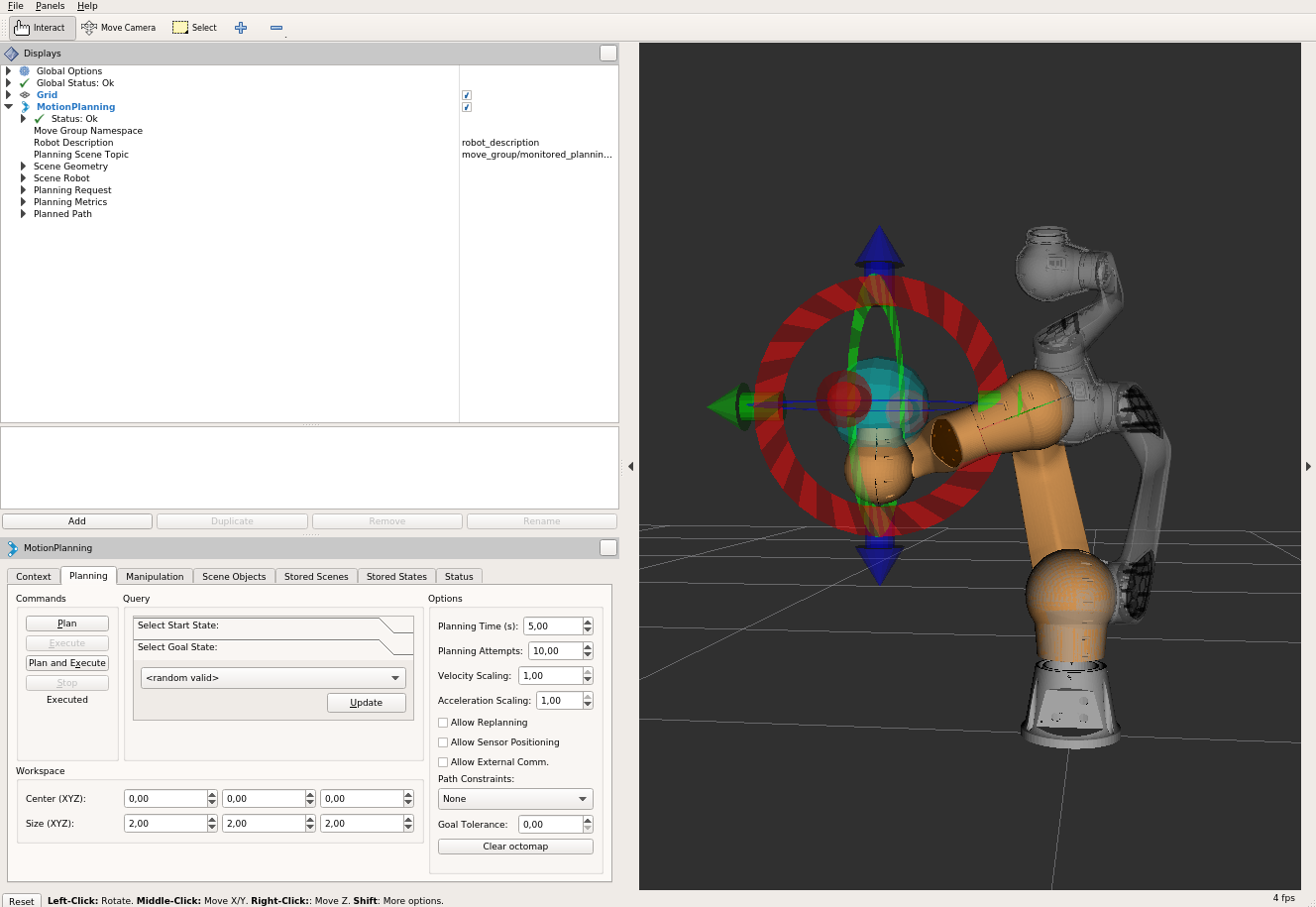
**可视化工具**:通过RViz插件提供直观的机器人模型、规划场景和运动轨迹可视化。
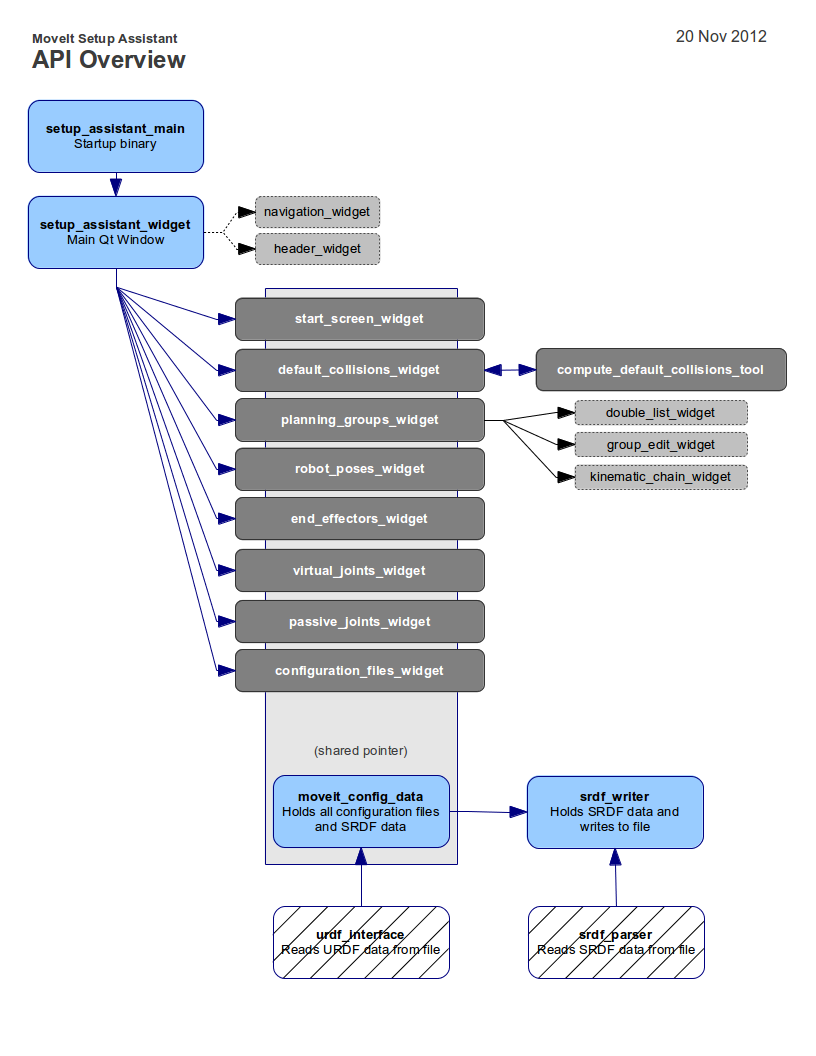
**模块化设计**:核心库、规划器、运动学等组件独立,易于扩展和替换。
**商业支持**:有商业版本MoveIt Pro,提供企业级功能和支持。
技术规格
| 支持ROS版本 | ROS 1 Melodic (Ubuntu Bionic), Noetic (Ubuntu Focal) |
|---|---|
| 核心库 | moveit_core |
| 运动规划器 | OMPL, CHOMP, Pilz Industrial Motion Planner |
| 逆运动学 | 多种IK求解器(KDL, TRAC-IK等) |
| 碰撞检测 | FCL (Flexible Collision Library) |
| 编程语言 | C++, Python |
| 许可证 | BSD |
| 持续集成 | GitHub Actions, CodeCov, ROS Buildfarm |
| Docker支持 | 官方Docker镜像,自动构建 |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| Ubuntu 18.04/20.04 | 1 | — | 操作系统 |
| ROS Melodic/Noetic | 1 | — | 机器人操作系统 |
| MoveIt | 1 | — | 运动规划框架 |
| 兼容ROS的机器人(如UR5, Panda等) | 1 | — | 可选,用于实际测试 |
| 深度相机(如Intel RealSense) | 1 | — | 可选,用于3D感知 |
3D 模型
能力画像
⚪ 记忆与知识检索: 2/5
🔵 逻辑推演: 4/5
⚪ 表达与交流: 1/5
⚪ 感知与观察: 3/5
⚪ 数理与计算: 4/5
⚪ 动手与操作: 2/5
⚪ 狂热与坚持: 3/5
⚪ 创造与创新: 4/5
项目图库



所需技能
🔧 **动手能力**:需要能够搭建和配置机器人硬件(如机械臂、传感器),进行简单的硬件调试。
💻 **编程能力**:需要熟练掌握C++或Python,熟悉ROS编程模型(节点、话题、服务、动作),理解运动规划算法原理。
⚡ **电子电路**:基本了解,主要用于传感器和机器人控制器的连接。
适用场景
**工业机器人编程**:为工业机械臂(如UR、KUKA、ABB)开发运动规划和控制程序。
**机器人研究**:作为算法研究平台,测试新的运动规划、IK或碰撞检测算法。
**教育**:用于机器人学课程教学,帮助学生理解运动规划、逆运动学等概念。
**商业应用开发**:快速原型验证,开发机器人抓取、装配、搬运等商业应用。
**服务机器人**:为移动操作机器人(如PR2、Fetch)提供运动规划能力。