实时SVSDF规划器
Real-Time-SVSDF-Planner
比赛/竞技
1/5
🧩 软硬件结合
已发布
项目简介
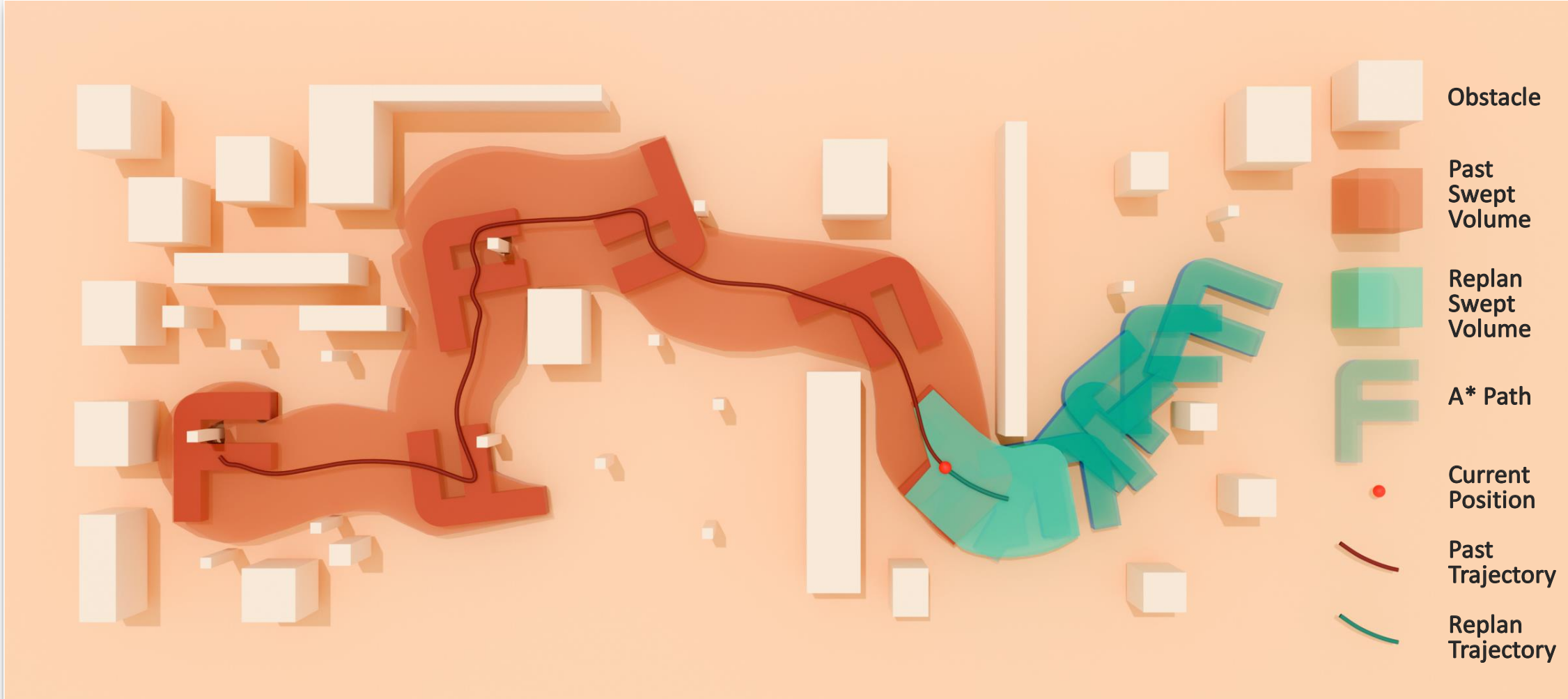
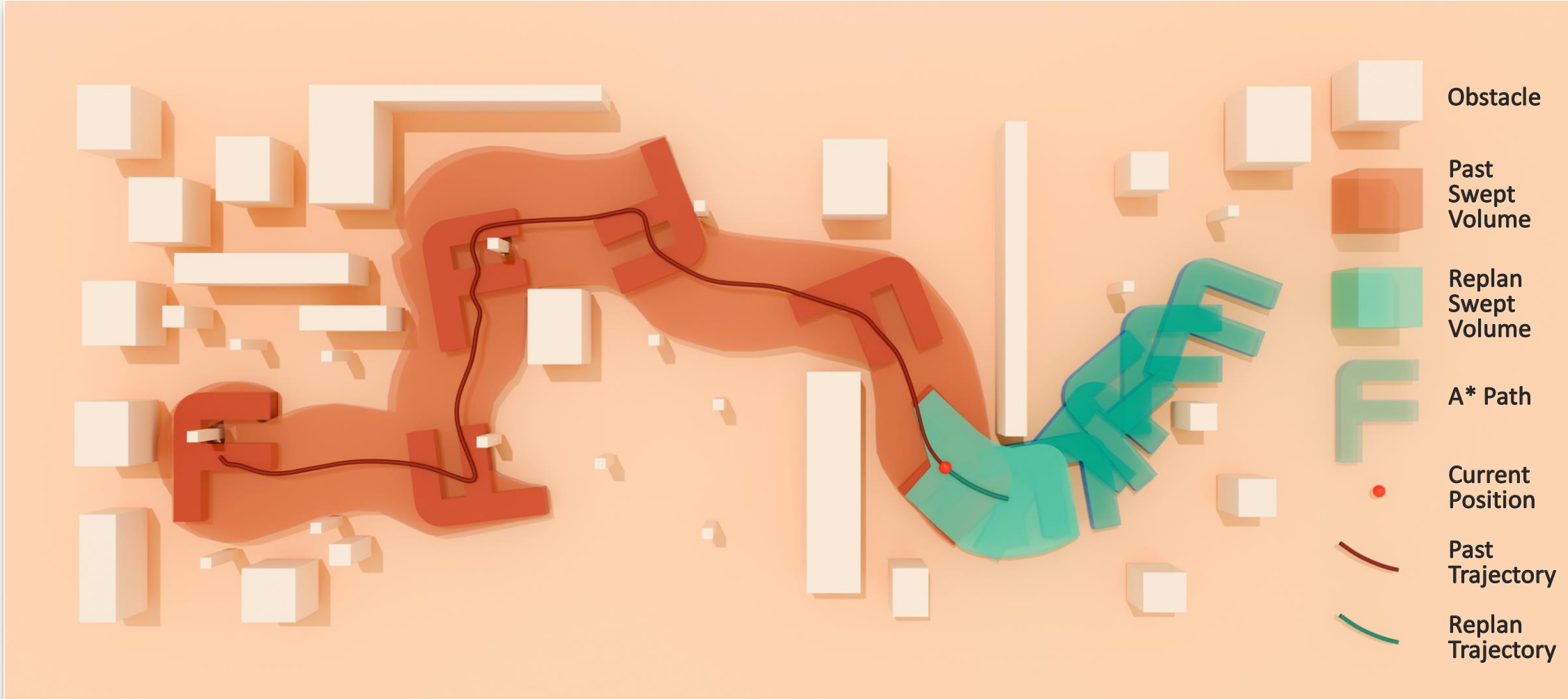
通过SVSDF实现任意形状实时重规划。
Real-Time-SVSDF-Planner 是一个面向任意形状机器人的实时重规划开源项目,核心基于符号化有符号距离场(SVSDF)技术。该项目解决了传统路径规划方法在复杂动态环境中难以兼顾实时性与任意形状适应性的痛点——当机器人外形不规则或环境发生突变时,现有规划器往往需要大量预计算或牺牲响应速度。通过SVSDF的数学表达,该规划器能够将任意形状的机器人模型转化为高效的碰撞检测与路径优化约束,在毫秒级时间内完成重规划,尤其适用于仓储物流机器人、服务机器人以及需要频繁避障的无人机集群等场景。
项目特点
支持任意形状机器人的实时路径重规划
基于 SVSDF 的高效碰撞检测与路径优化
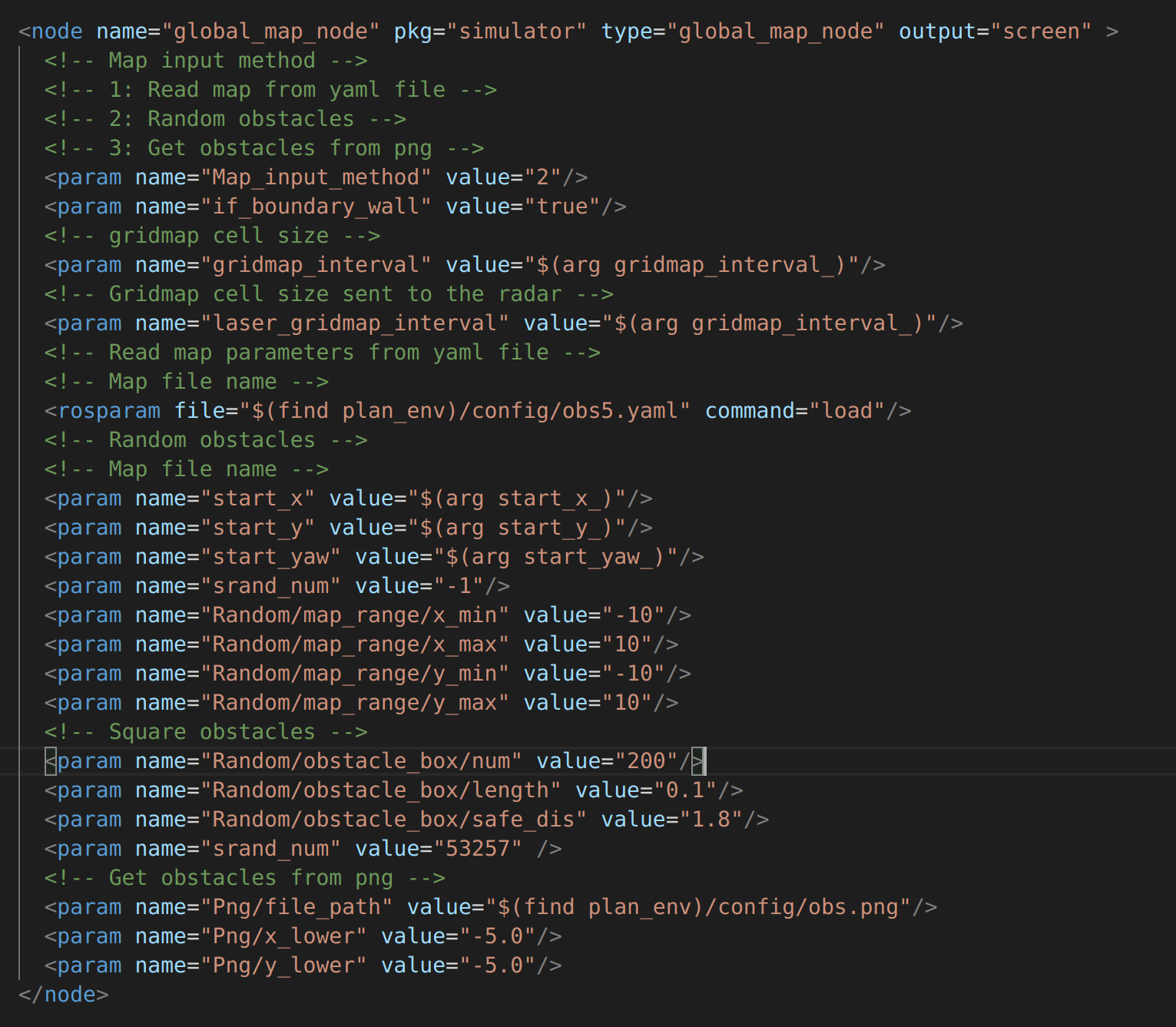
提供 ROS 仿真环境,方便测试与验证
地图参数可调,适应不同场景需求
技术规格
| 规划器类型 | 实时重规划器 |
|---|---|
| 核心算法 | SVSDF (Signed Vector Distance Field) |
| 支持机器人形状 | 任意形状 |
| 仿真环境 | ROS (Robot Operating System) |
| 当前版本 | 1.0 |
| 依赖 | Catkin, ROS |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| ROS (Melodic/Noetic) | 1 | — | 必需 |
| Catkin 构建工具 | 1 | — | 必需 |
| 运行 ROS 的计算机 | 1 | — | 推荐 Ubuntu 系统 |
能力画像
⚪ 记忆与知识检索: 1/5
🔵 逻辑推演: 4/5
⚪ 表达与交流: 1/5
⚪ 感知与观察: 2/5
🔵 数理与计算: 4/5
🔵 动手与操作: 3/5
⚪ 狂热与坚持: 2/5
🔵 创造与创新: 4/5
项目图库

所需技能
🔧 **动手能力**:能够搭建 ROS 环境,运行仿真,调整参数。
💻 **编程能力**:熟悉 C++/Python,了解 ROS 编程和 Catkin 构建系统。
⚡ **电子电路**:无需硬件电路知识,纯软件仿真项目。
适用场景
无人机在复杂环境中的实时路径规划与避障
机器人导航算法的研究与教学
基于 SVSDF 的路径规划算法验证与对比