待补充
glumb/mrc
机器人
3/5
🧩 软硬件结合
已发布

项目简介
MicroPede robot controller 🤖🖥👾
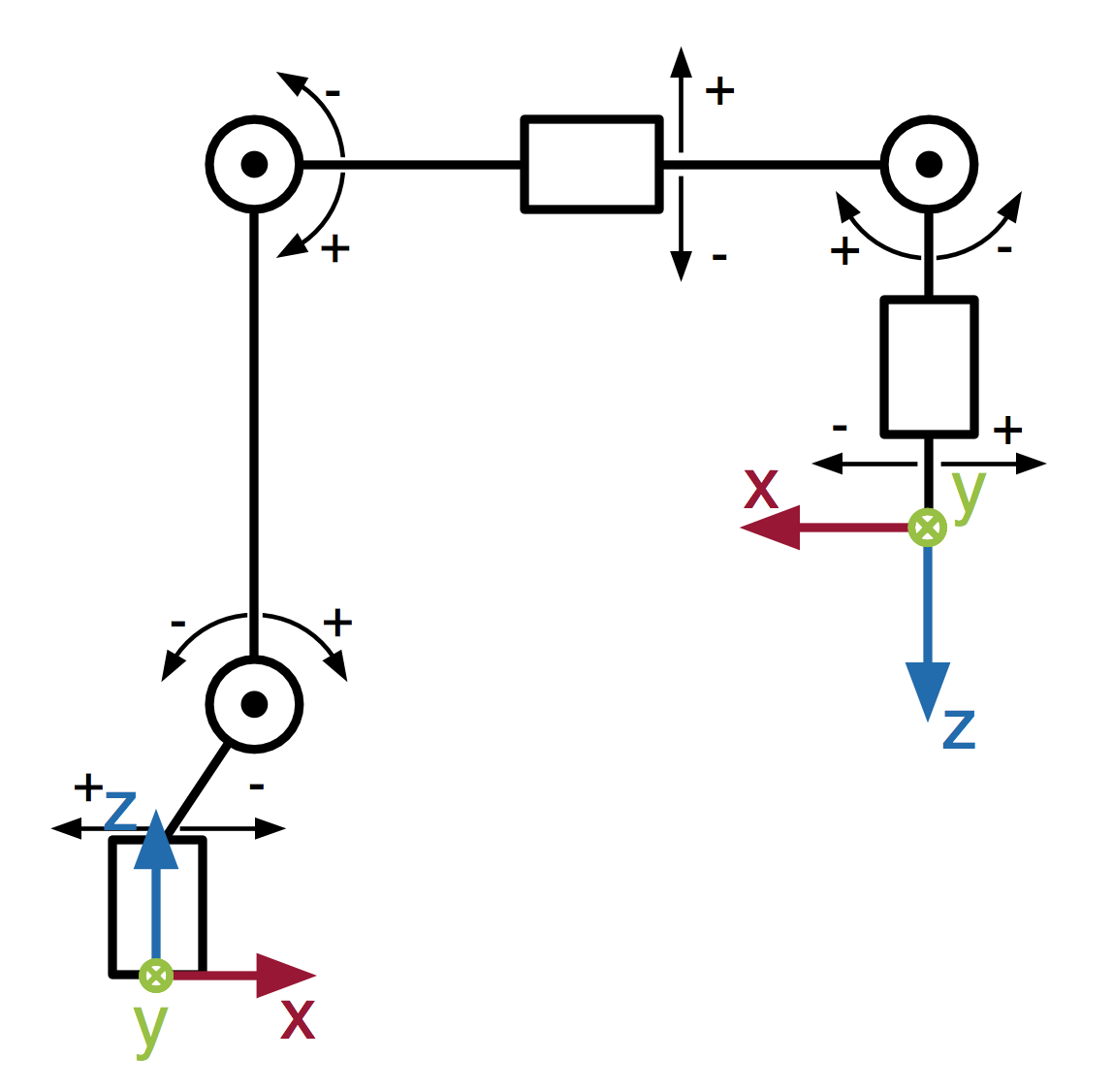
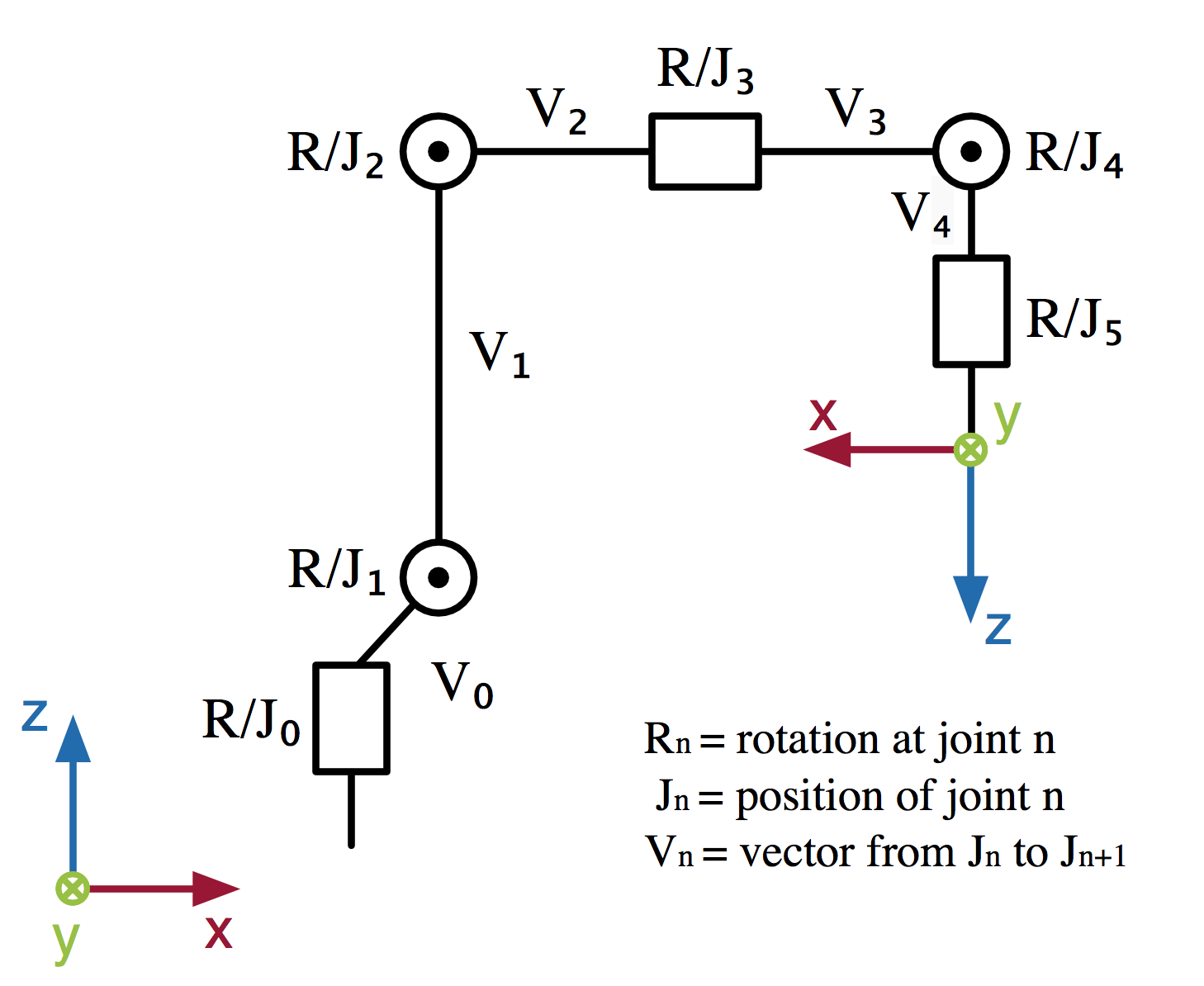
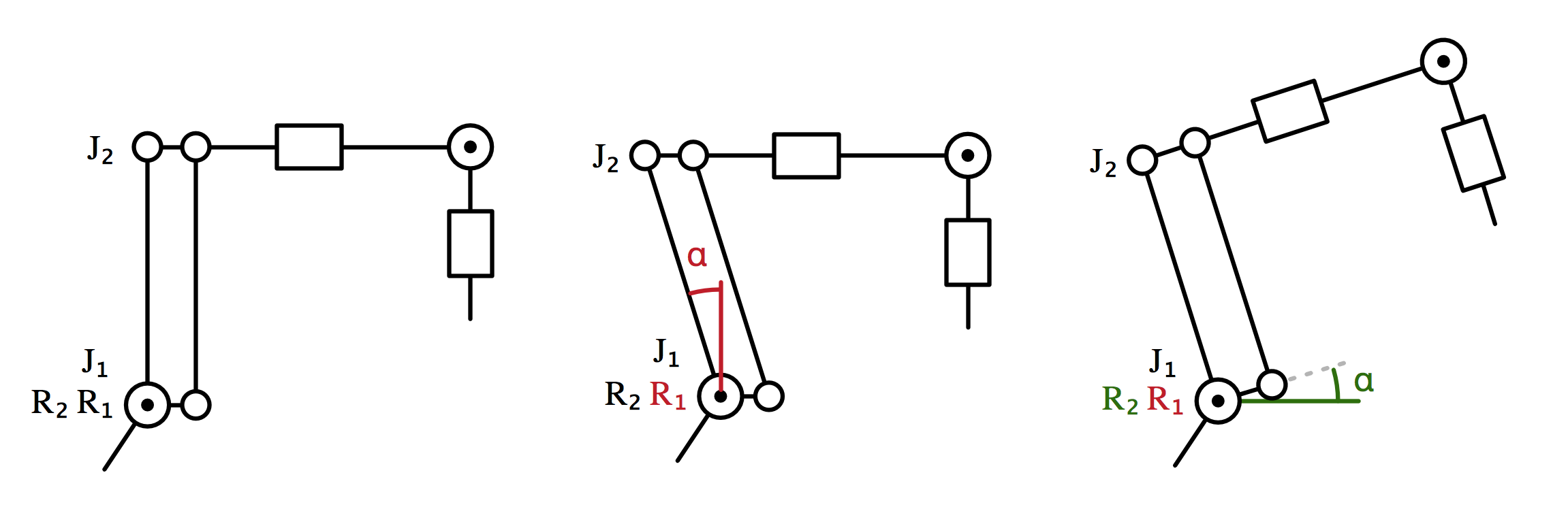
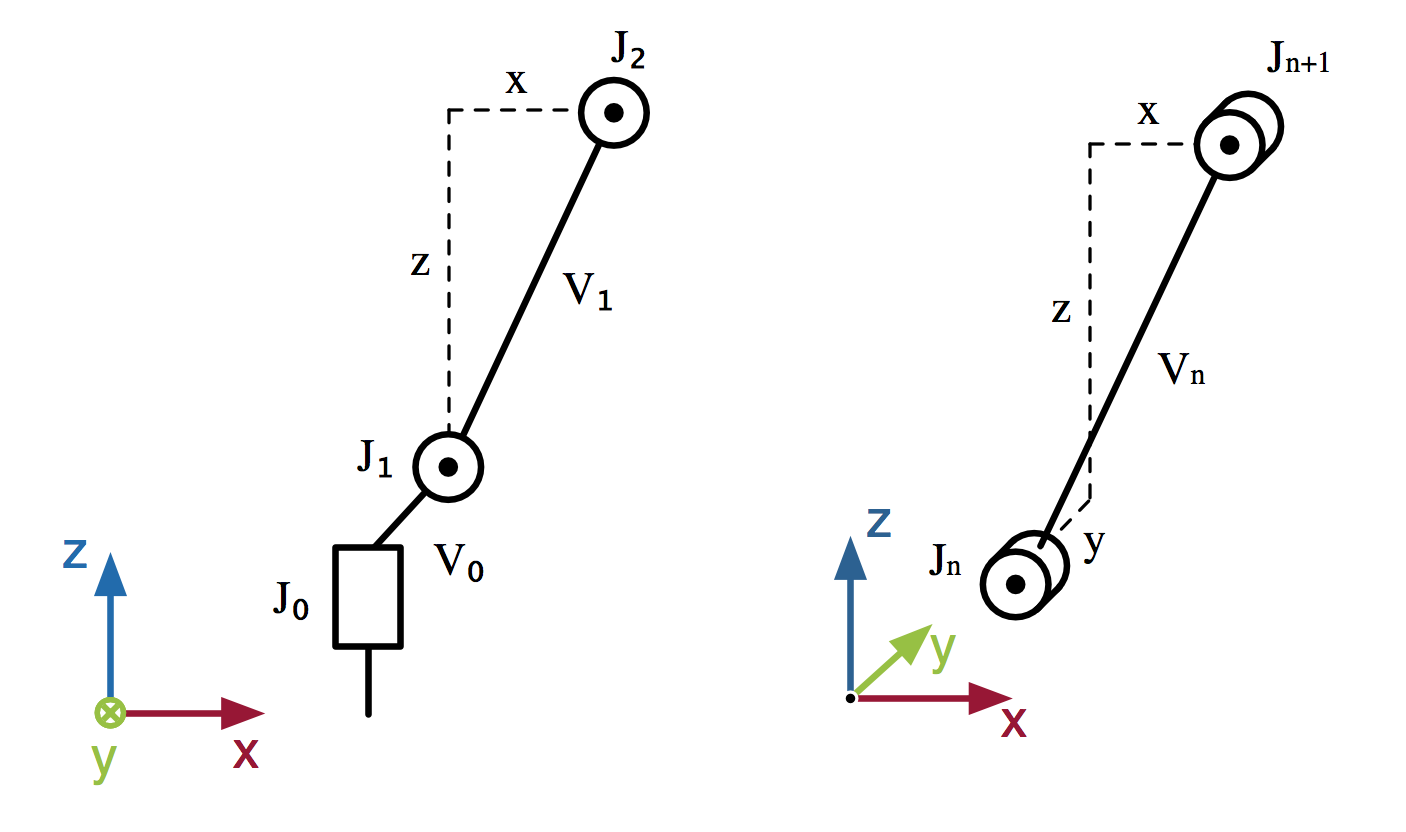
mrc 是一个面向微型机器人爱好者的开源项目,核心功能是让用户通过类 G 代码的 MRIL 语言,精确控制六自由度(6 DOF)机械臂。项目目前仍在积极开发中,欢迎社区参与改进。它主要解决的是微型机械臂控制门槛高、缺乏统一指令集的问题。通过 mrc,用户无需编写复杂的底层驱动,只需通过串口发送简单的文本指令,就能让机械臂执行复杂的空间运动。项目基于 PlatformIO 构建,支持 Arduino 或 Teensy 等常见微控制器,技术栈主要涉及 C++ 和嵌入式开发。其核心优势在于提供了一套完整的软硬件方案:从伺服电机校准、机器人几何参数配置,到逆运动学解算,再到与上位机通信的 MRIL 指令集,形成了一条清晰的控制链路。用户可以通过配置文件灵活定义每个舵机的引脚、角度范围、最大角速度以及机器人的连杆长度等几何参数。此外,项目还支持扩展轴(如夹爪)和通用 IO 控制,并可选配 128x64 显示屏用于状态反馈。适用场景非常明确:适合教育、创客空间或小型实验室中,需要快速搭建和调试微型机械臂原型。无论是用于教学演示、自动化实验,还是作为机器人控制算法的验证平台,mrc 都能提供一个轻量、开放且可定制的起点。对于希望深入理解机械臂控制原理或进行二次开发的开发者来说,这个项目也是一个很好的学习资源。
标签
项目特点
**MRIL 指令语言**:提供类似 G 代码的文本指令集,降低机械臂控制门槛,无需深入嵌入式开发即可操作。
**完整软硬件方案**:从伺服电机校准、机器人几何参数配置到逆运动学解算,提供一站式解决方案。
**跨平台支持**:基于 PlatformIO 构建,兼容 Arduino 和 Teensy 等主流微控制器,易于移植和扩展。
**六自由度控制**:支持精确控制 6 DOF 机械臂,实现复杂的空间运动轨迹。
**开源社区驱动**:项目仍在积极开发中,鼓励社区贡献代码、文档和改进建议。
**串口通信**:通过标准串口与上位机通信,方便与各种上位机软件或自定义工具集成。
技术规格
| 控制自由度 | 6 DOF |
|---|---|
| 指令语言 | MRIL(类 G 代码) |
| 开发框架 | PlatformIO |
| 支持微控制器 | Arduino、Teensy 等 |
| 通信方式 | 串口(UART) |
| 编程语言 | C++ |
| 逆运动学解算 | 内置支持 |
| 伺服电机校准 | 支持 |
| 几何参数配置 | 支持 |
| 项目状态 | 积极开发中 |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| Arduino 或 Teensy 开发板 | 1 | — | 推荐使用 Teensy 以获得更好性能 |
| 微型伺服电机 | 6 | — | 用于六自由度机械臂关节 |
| USB 转串口模块 | 1 | — | 用于与上位机通信 |
| 机械臂结构件 | 1套 | — | 3D 打印或成品套件 |
| 5V/2A 电源适配器 | 1 | — | 为控制器和伺服电机供电 |
能力画像
**记忆与知识检索**:3/5 — 需要查阅 MRIL 指令集和机械臂运动学文档,但指令数量有限,上手较快。
**动手与操作**:4/5 — 需要组装机械臂、连接电路和校准伺服电机,对动手能力有一定要求。
**编程与算法**:3/5 — 主要使用 C++ 进行固件修改和功能扩展,但基础功能无需编程即可使用。
**设计与建模**:2/5 — 项目提供现成方案,如需自定义机械臂结构,则需 3D 建模能力。
**实验与调试**:4/5 — 需要反复调试伺服角度、逆运动学参数和串口通信,实验性质较强。
**协作与分享**:3/5 — 项目开源且欢迎社区贡献,可通过 Issue 和 PR 参与协作。
**学习与研究**:4/5 — 涉及机器人学、运动学、嵌入式系统等多个领域,学习价值高。
**系统集成**:3/5 — 需要将硬件、固件和上位机软件集成在一起,但整体复杂度适中。
项目图库



所需技能
基础嵌入式开发(C++)
串口通信原理
机器人运动学基础(逆运动学概念)
电路连接与调试
3D 打印或机械组装(可选)
PlatformIO 或 Arduino IDE 使用
适用场景
微型机器人爱好者的入门实践项目
教育场景中的机器人控制教学
桌面级机械臂的快速原型开发
机器人运动学算法的实验平台
创客空间中的自动化演示项目
小型生产线或实验室的轻量级机械臂控制