待补充
LeCAR-Lab/FALCON
机器人
3/5
🧩 软硬件结合
已发布
项目简介
[L4DC 2026] "FALCON: Learning Force-Adaptive Humanoid Loco-Manipulation"
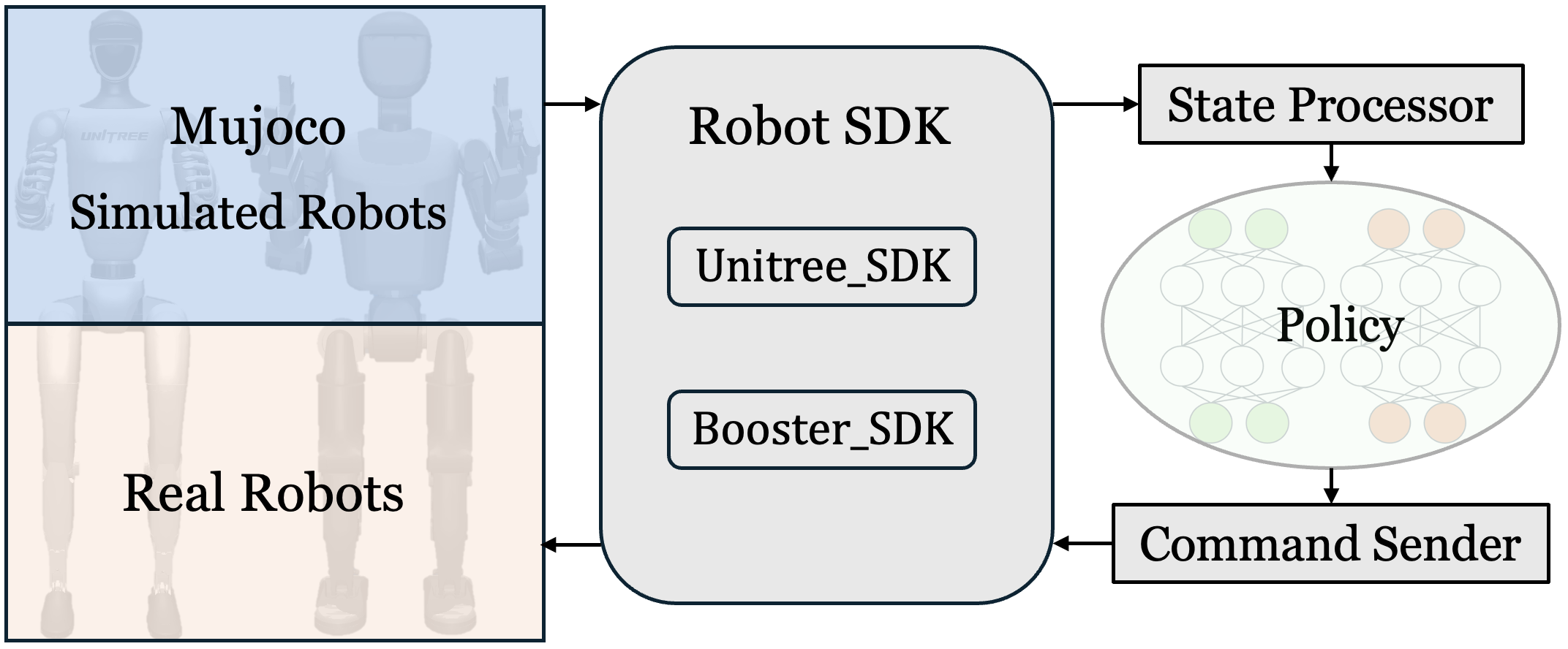
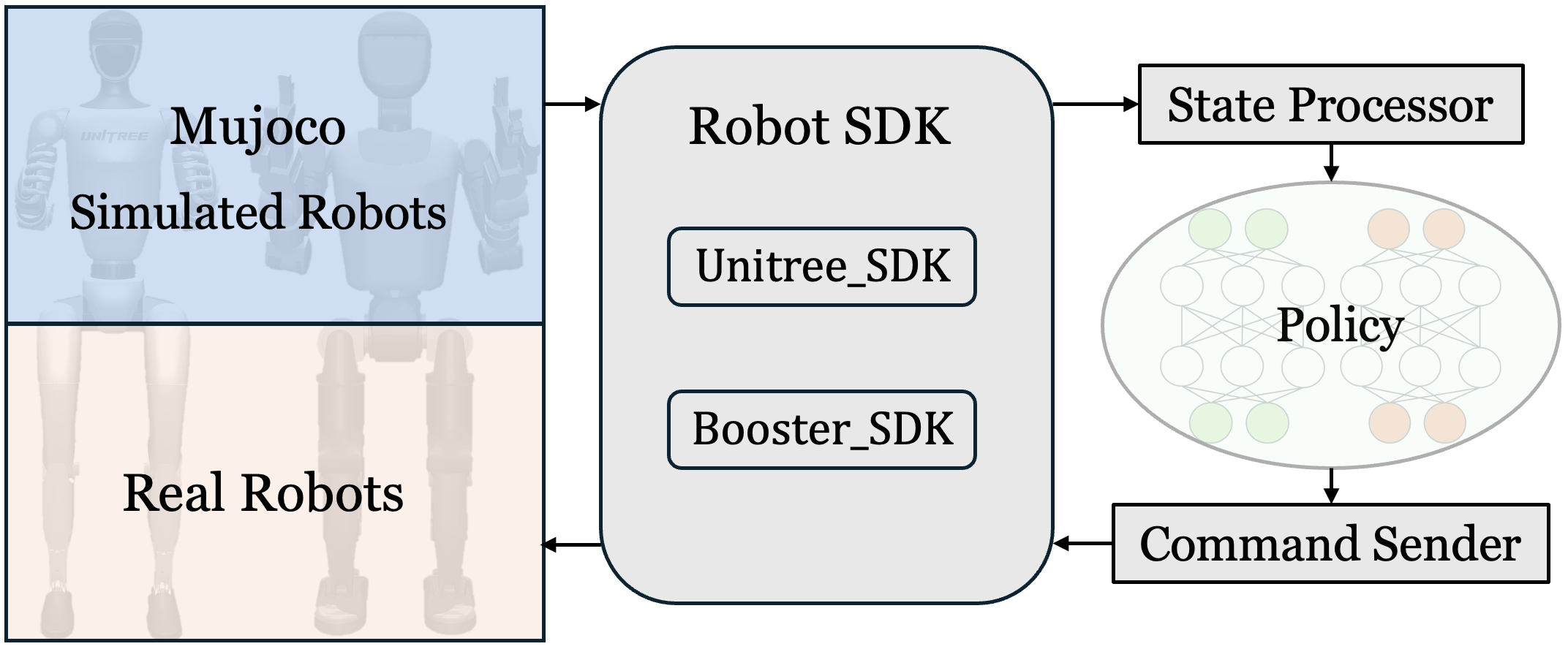
FALCON是一个面向人形机器人的力自适应全身运动与操作学习框架,由LeCAR Lab团队开发,相关论文已被L4DC 2026会议接收为Oral报告。该项目旨在解决人形机器人在复杂物理交互场景中,如何同时协调下肢行走与上肢操作这一核心难题。传统方法往往将运动与操作分离处理,导致机器人面对外力干扰或需要同时搬运、推拉物体时表现僵硬、适应性差。FALCON的核心创新在于提出了一种双智能体强化学习架构,将全身控制解耦为下肢运动与上肢操作两个协同学习的策略网络,并通过力自适应机制让机器人能够根据实时接触力动态调整姿态与动作。项目基于NVIDIA IsaacGym物理仿真平台进行训练,支持Unitree G1和Booster T1两款29自由度人形机器人。技术栈方面,采用Python开发,依赖PyTorch进行策略网络训练,并集成了域随机化、多智能体PPO等算法来提升策略的鲁棒性。FALCON提供了完整的训练、评估、仿真到仿真(sim2sim)以及仿真到实物(sim2real)的部署代码,支持通过unitree_sdk2_python和booster_robotics_sdk直接控制真实机器人。该框架适用于需要人形机器人在非结构化环境中执行搬运、推拉、抗扰动等任务,尤其适合对力交互有高要求的场景,如家庭服务、工业巡检、灾难救援等。项目已开源全部代码,并提供了详细的安装与使用文档。
标签
项目特点
**双智能体强化学习架构**:将全身控制解耦为下肢运动与上肢操作两个协同学习的策略网络,实现高效分工与联合优化。
**力自适应机制**:机器人能够根据实时接触力动态调整姿态与动作,在复杂物理交互场景中保持稳定与灵活。
**基于NVIDIA IsaacGym**:利用高性能物理仿真环境进行训练,支持大规模并行模拟,加速策略学习。
**支持Unitree机器人**:框架针对Unitree系列人形机器人进行了适配与验证,具备实际部署潜力。
**学术前沿成果**:相关论文被L4DC 2026会议接收为Oral报告,技术路线经过同行评审认可。
技术规格
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| Unitree 人形机器人 | 1 | — | 具体型号待确认 |
| GPU工作站(NVIDIA RTX系列) | 1 | — | 用于训练与推理 |
| 关节编码器 | 按机器人配置 | — | 内置 |
| 六维力/力矩传感器 | 按机器人配置 | — | 用于力自适应反馈 |
| IMU | 1 | — | 用于姿态估计 |
| NVIDIA IsaacGym | 1 | — | 物理仿真环境 |
| PyTorch | 1 | — | 深度学习框架 |
| ROS(可选) | 1 | — | 机器人操作系统接口 |
3D 模型
能力画像
**记忆与知识检索**:3/5 — 项目涉及强化学习与机器人控制知识,需要查阅论文与文档,但本身不提供知识库功能。
**动手与操作**:4/5 — 需要搭建仿真环境、配置机器人硬件、调试传感器与执行器,动手要求较高。
**编程与算法**:5/5 — 核心是双智能体强化学习算法实现,需要扎实的Python、PyTorch及RL编程能力。
**设计与建模**:3/5 — 需要理解机器人运动学与动力学模型,但框架已提供预定义模型,修改需求中等。
**实验与调试**:5/5 — 训练过程需要大量实验调参,包括奖励函数设计、策略网络结构、训练超参数等。
**协作与分享**:3/5 — 开源项目支持社区贡献,但当前团队规模较小,协作文档有待完善。
**学习与研究**:5/5 — 前沿研究项目,适合学习人形机器人全身控制与强化学习,论文已被顶级会议接收。
**系统集成**:4/5 — 需要将仿真训练的策略部署到真实机器人,涉及仿真到现实的迁移与系统集成。
项目图库








视频
所需技能
Python 编程
PyTorch 深度学习框架
强化学习(特别是策略梯度方法、双智能体架构)
机器人运动学与动力学基础
NVIDIA IsaacGym 仿真环境使用
人形机器人控制基础
传感器数据处理(力传感器、IMU)
版本控制(Git)
实验设计与调参能力
适用场景
人形机器人全身协调控制研究
复杂物理交互场景下的运动与操作联合学习
双智能体强化学习算法验证与对比
人形机器人搬运、推拉、开门等任务开发
仿真到现实(Sim-to-Real)迁移研究
机器人抗外力干扰与自适应控制实验
高校与科研机构的机器人控制课程项目
人形机器人竞赛或演示任务开发