待补充
epfl-lasa/ridgeback_ur5_controller
机器人
3/5
🧩 软硬件结合
已发布
项目简介
Several controllers to move Ridgeback mobile-robot and UR5 robotic-arm.
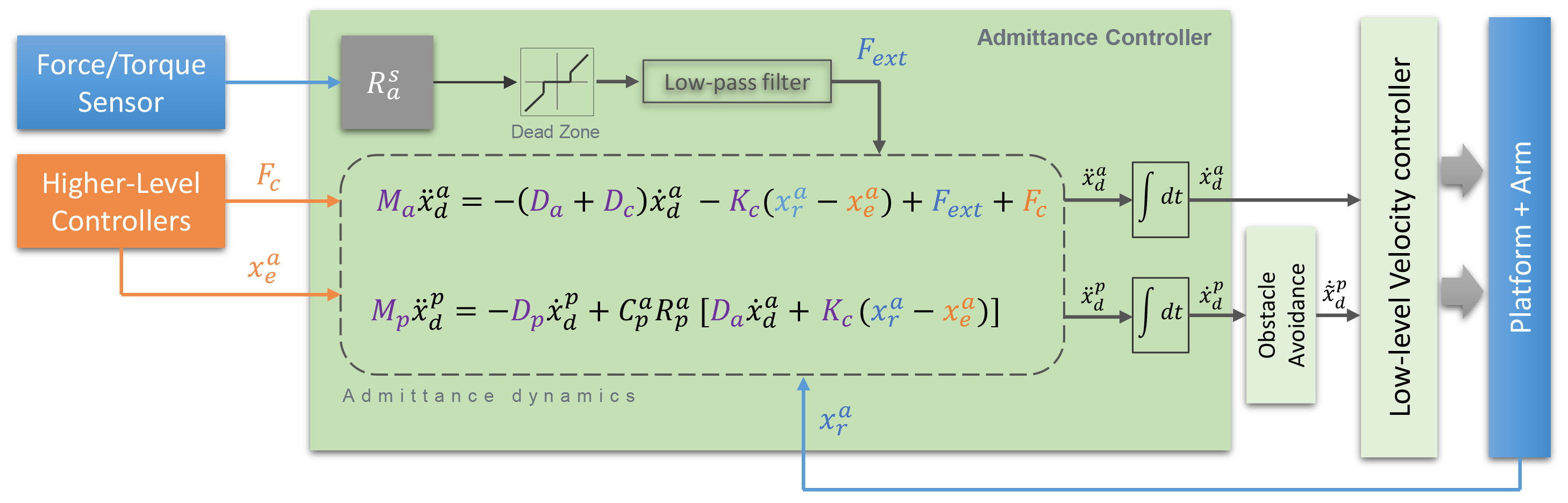
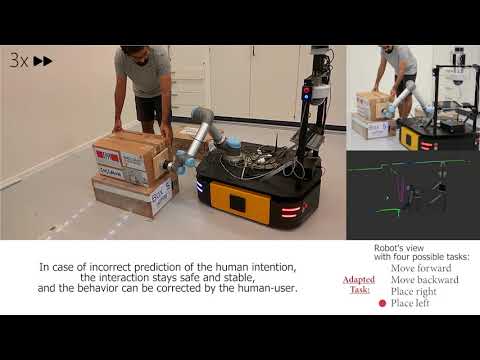
这是一个由瑞士洛桑联邦理工学院(EPFL)先进机器人实验室开发的开源机器人控制项目,专门针对搭载了UR5机械臂的Ridgeback移动机器人平台。项目核心提供了一套完整的运动控制解决方案,主要包含五个功能模块:首先是导纳控制器,它通过力/扭矩传感器感知外部作用力,并基于质量-阻尼-刚度动力学模型计算机器人平台与机械臂的期望加速度,实现柔顺的人机交互;其次是UR5笛卡尔速度控制器,能够直接控制机械臂末端在三维空间中的运动速度;第三是障碍物规避模块,利用激光雷达实时检测最近障碍物并自动滤除朝向障碍物的速度分量;第四是运动捕捉跟踪模块,使机器人能够自动校准并跟踪外部标记物的位置;最后还提供了完整的仿真与实机启动配置。技术栈基于ROS Indigo和Gazebo 7仿真环境,采用C++编写核心控制算法,通过YAML文件灵活配置导纳参数。这个项目主要解决了移动机械臂在复杂环境中安全、柔顺地执行任务的问题,特别适用于需要人机协作的场景,比如在实验室或工厂中,机器人需要配合人类操作员完成搬运、装配等任务,同时能够自主避开障碍物并跟踪移动目标。
标签
项目特点
**导纳控制**:通过力/扭矩传感器感知外部作用力,基于质量-阻尼-刚度动力学模型计算机器人平台与机械臂的期望加速度,实现柔顺的人机交互
**UR5笛卡尔速度控制**:直接控制机械臂末端在三维空间中的运动速度,便于精确操作
**障碍物规避**:利用激光雷达实时检测最近障碍物,自动滤除朝向障碍物的速度分量,确保安全
**运动捕捉跟踪**:使机器人能够自动校准并跟踪外部标记物的位置,适用于动态环境
**完整仿真支持**:提供完整的仿真环境,方便在部署前进行算法验证和测试
技术规格
| 机器人平台 | |
|---|---|
| 机械臂 | |
| 传感器 | |
| 控制频率 | |
| 通信接口 | |
| 操作系统 | |
| 编程语言 | |
| 依赖框架 |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| Ridgeback移动机器人 | 1 | — | Clearpath Robotics |
| UR5协作机器人 | 1 | — | Universal Robots |
| 力/扭矩传感器 | 1 | — | 安装在机械臂末端 |
| 激光雷达 | 1 | — | 用于障碍物检测 |
| 工控机/笔记本电脑 | 1 | — | 运行ROS控制节点 |
| 运动捕捉标记物 | 若干 | — | 用于位置跟踪 |
能力画像
**记忆与知识检索**:2/5 — 项目本身不涉及知识库或检索功能,但依赖ROS生态文档
**动手与操作**:4/5 — 需要实际搭建机器人硬件平台,安装传感器并进行校准
**编程与算法**:5/5 — 核心包含导纳控制、速度控制、障碍物规避等复杂算法实现
**设计与建模**:3/5 — 涉及动力学模型设计,但主要基于已有模型进行参数调整
**实验与调试**:4/5 — 需要在实际机器人上进行大量调试,包括传感器标定和参数整定
**协作与分享**:3/5 — 开源项目,支持社区贡献,但文档和社区规模有限
**学习与研究**:5/5 — 涉及人机交互、运动控制、避障等前沿机器人研究领域
**系统集成**:5/5 — 需要集成移动平台、机械臂、多种传感器和控制系统
项目图库


所需技能
ROS(机器人操作系统)基础与进阶使用
C++编程(特别是Eigen库的使用)
机器人运动学与动力学基础
导纳控制与阻抗控制理论
激光雷达数据处理与障碍物检测
运动捕捉系统配置与使用
Linux系统操作与命令行
Git版本控制
硬件调试与传感器标定
适用场景
人机协作机器人研究(如物理人机交互实验)
移动操作机器人开发(移动平台+机械臂联合控制)
服务机器人应用(如仓储物流、医疗辅助)
机器人避障与导航算法验证
机器人教学与学术研究(高校实验室)
工业自动化中的柔性装配任务
机器人仿真与算法快速原型开发