待补充
Taeyoung96/GRIL-Calib
机器人
3/5
🧩 软硬件结合
已发布
项目简介
[RA-L 2024] GRIL-Calib: Targetless Ground Robot IMU-LiDAR Extrinsic Calibration Method using Ground Plane Motion Constra
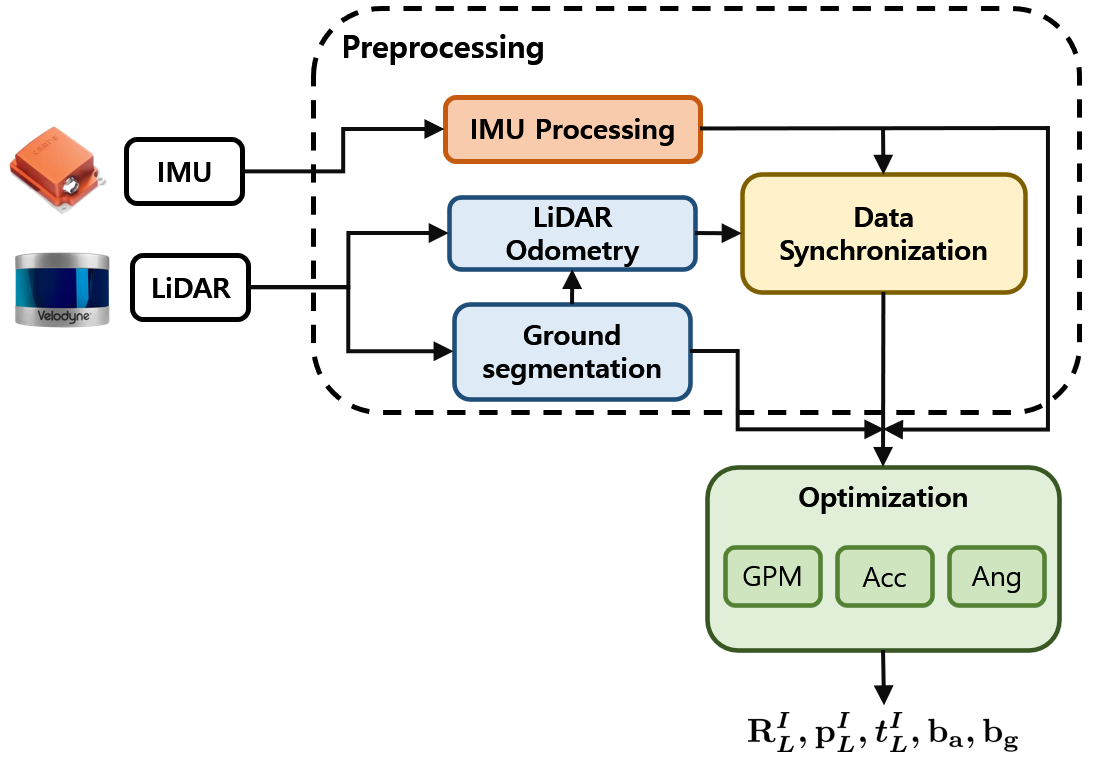
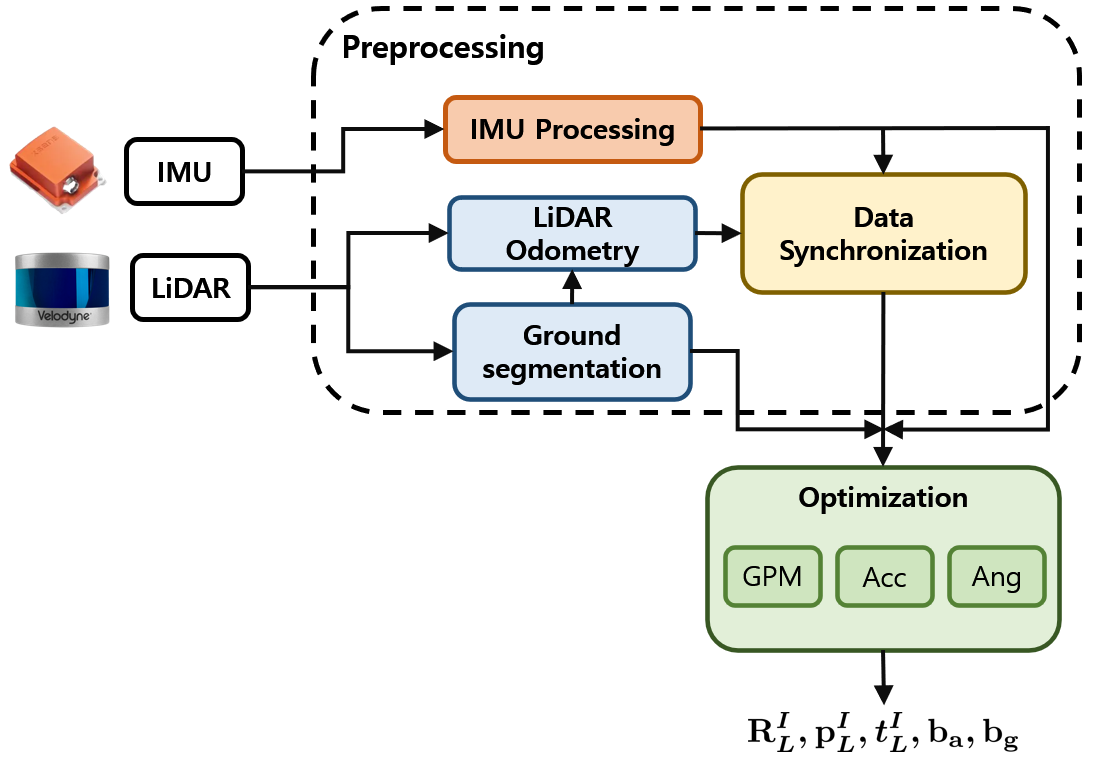
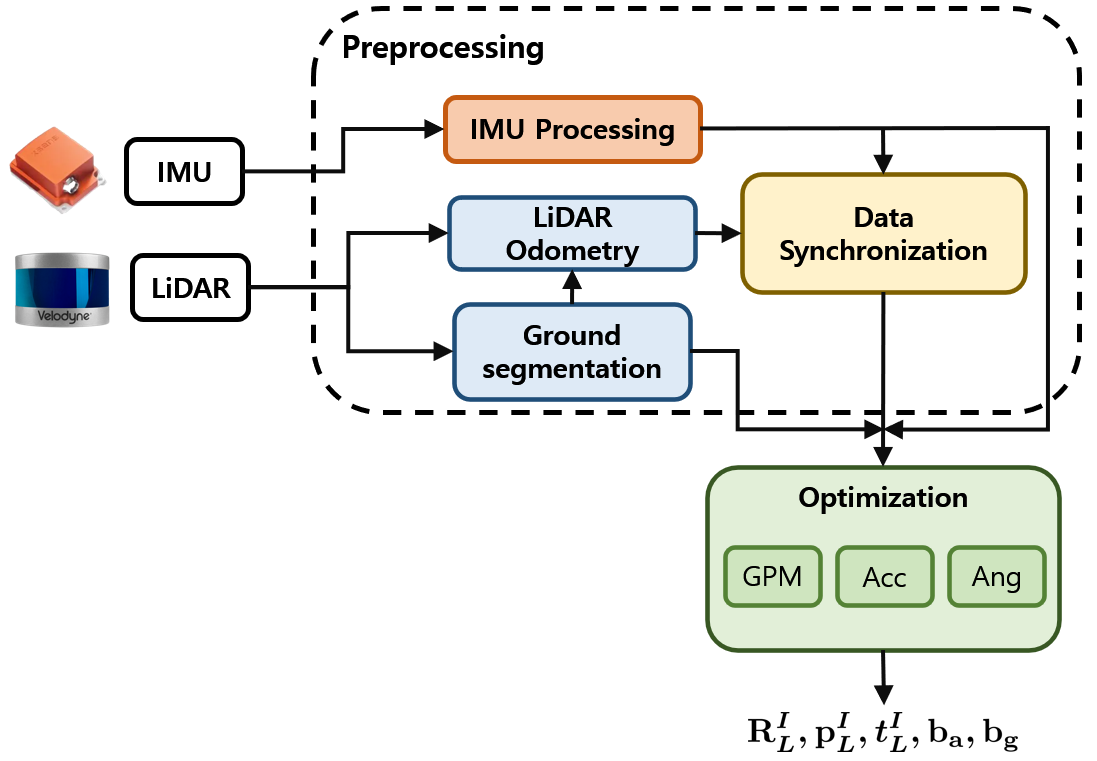
GRIL-Calib 是一个面向地面机器人的开源IMU与LiDAR外参标定工具,由韩国延世大学研究团队开发,相关论文已被IEEE RA-L接收。该项目最核心的创新在于实现了“无靶标”标定——无需任何标定板或人工特征,仅利用地面平面运动约束即可完成六自由度外参的精确估计。这意味着用户只需让机器人在平坦地面上正常行驶,系统就能自动完成传感器之间的旋转和平移参数标定。
标签
项目特点
**无靶标标定**:无需标定板、棋盘格或任何人工特征,仅利用地面平面约束即可完成标定
**仅需平面运动**:用户只需让机器人在平坦地面上行驶,无需复杂的运动轨迹或特定动作
**六自由度精确估计**:同时估计IMU与LiDAR之间的旋转矩阵和平移向量,覆盖全部6个自由度
**开源且可复现**:代码完全开源,提供详细的实验数据和复现指南,方便学术研究和工程应用
**基于论文验证**:相关方法已被IEEE RA-L期刊接收,算法经过同行评审,可靠性有保障
**面向地面机器人**:专为轮式或履带式地面机器人设计,贴合实际应用场景
技术规格
| 标定对象 | IMU(惯性测量单元)与LiDAR(激光雷达) |
|---|---|
| 标定自由度 | 6自由度(3旋转 + 3平移) |
| 标定方式 | 无靶标,基于地面平面运动约束 |
| 运动要求 | 平坦地面上的平面运动 |
| 输入数据 | IMU测量数据 + LiDAR点云数据 |
| 输出结果 | 外参旋转矩阵R和平移向量t |
| 开发语言 | Python |
| 依赖框架 | ROS(Robot Operating System) |
| 论文状态 | 已被IEEE RA-L接收 |
| 开发机构 | 韩国延世大学 |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| 地面机器人平台 | 1 | — | 轮式或履带式,需搭载IMU和LiDAR |
| IMU传感器 | 1 | — | 提供角速度和加速度数据 |
| LiDAR传感器 | 1 | — | 提供3D点云数据 |
| ROS(Robot Operating System) | 1 | — | 推荐Melodic或Noetic版本 |
| Python 3 | 1 | — | 运行标定脚本 |
| NumPy | 1 | — | 数值计算库 |
| Open3D或PCL | 1 | — | 点云处理库 |
| 平面运动数据集 | 1 | — | 用户自行采集或使用提供的示例数据 |
能力画像
**记忆与知识检索**:2/5 — 项目本身不涉及知识检索,但需要理解IMU和LiDAR标定的基础理论
**动手与操作**:4/5 — 需要搭建机器人平台、安装传感器、采集数据,动手操作要求较高
**编程与算法**:4/5 — 需要编写或修改Python脚本,理解标定算法中的数学推导
**设计与建模**:2/5 — 不需要设计新模型,但需要理解地面平面约束的数学模型
**实验与调试**:4/5 — 标定过程涉及数据采集、参数调优和结果验证,实验调试工作量大
**协作与分享**:3/5 — 开源项目鼓励社区贡献,可通过Issues和PR进行协作
**学习与研究**:4/5 — 涉及传感器标定、状态估计等前沿技术,适合深入学习和研究
**系统集成**:3/5 — 需要将标定结果集成到机器人系统中,涉及ROS节点和传感器驱动配置
项目图库
所需技能
机器人学基础,了解IMU和LiDAR工作原理
ROS(Robot Operating System)基本使用与节点编写
Python编程,熟悉NumPy等科学计算库
点云处理基础知识(Open3D或PCL)
线性代数与刚体变换基础
传感器标定基本概念
地面机器人平台搭建与调试经验
基本的数据采集与实验设计能力
适用场景
地面机器人(轮式/履带式)的IMU与LiDAR外参标定
自动驾驶小车、AGV、服务机器人等平台的传感器校准
学术研究中需要高精度传感器外参的机器人实验
机器人SLAM系统中IMU与LiDAR数据融合的前置标定
无标定板环境下快速部署机器人传感器的工程场景
机器人竞赛或快速原型开发中需要简化标定流程的场合