待补充
smart-methods/arduino_robot_arm
机器人
2/5
🧩 软硬件结合
已发布
项目简介
ROS packages to control an Arduino robot arm by using Moveit
这是一个基于ROS(机器人操作系统)开发的机械臂控制项目,旨在为机器人手臂提供从仿真到真实硬件的完整运动规划与执行方案。项目核心功能包括通过Moveit插件实现运动学解算(使用KDL求解器),支持在Gazebo仿真环境中进行轨迹规划与测试,并能直接驱动真实的Arduino控制机械臂。技术栈方面,项目依赖ROS Kinetic/Melodic/Noetic发行版,集成了Moveit、joint_state_publisher、Gazebo仿真工具以及rosserial_arduino通信协议,通过/joint_states话题实现ROS系统与Arduino底层电机控制的无缝对接。该机械臂拥有5个关节,其中4个可由ROS和Rviz完全控制,末端夹爪则由Arduino代码独立执行预设动作。项目解决了从仿真验证到实物部署的衔接问题,特别适合需要快速原型验证的机器人研发场景。此外,项目还集成了OpenCV视觉模块,能够通过摄像头识别蓝色物体,将坐标信息发布至/direction话题,结合Moveit的move_group节点实现自动抓取与放置(Pick and Place)功能。典型应用场景包括教育科研中的机器人运动学教学、低成本机械臂的自动化控制实验,以及需要视觉引导的轻量级分拣任务。用户只需按照文档配置好Arduino IDE和ROS依赖,即可通过简单的launch文件启动仿真或连接真实硬件,大幅降低了机器人开发的门槛。
标签
项目特点
完整支持从Gazebo仿真到真实硬件的运动规划与执行流程
集成Moveit运动规划框架,使用KDL求解器进行运动学解算
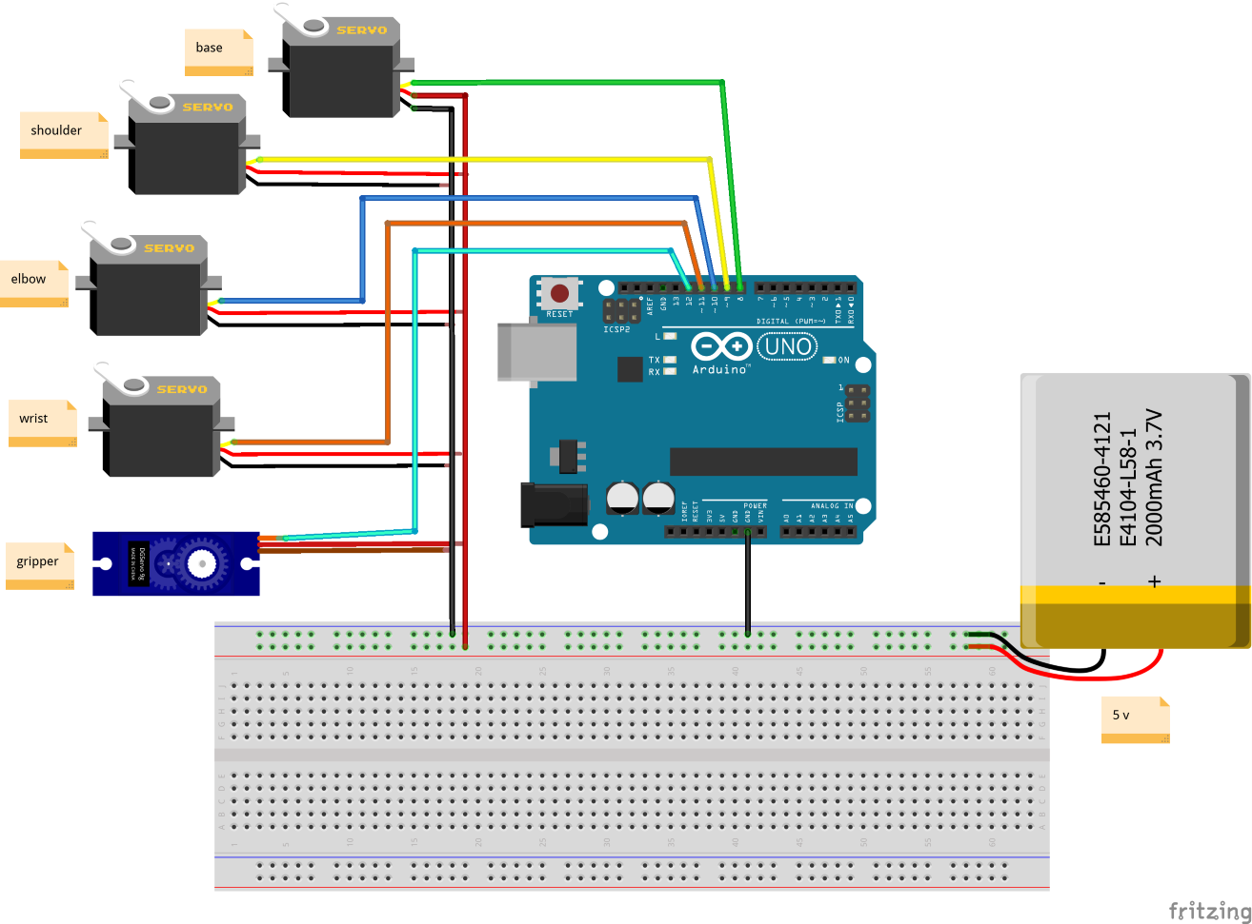
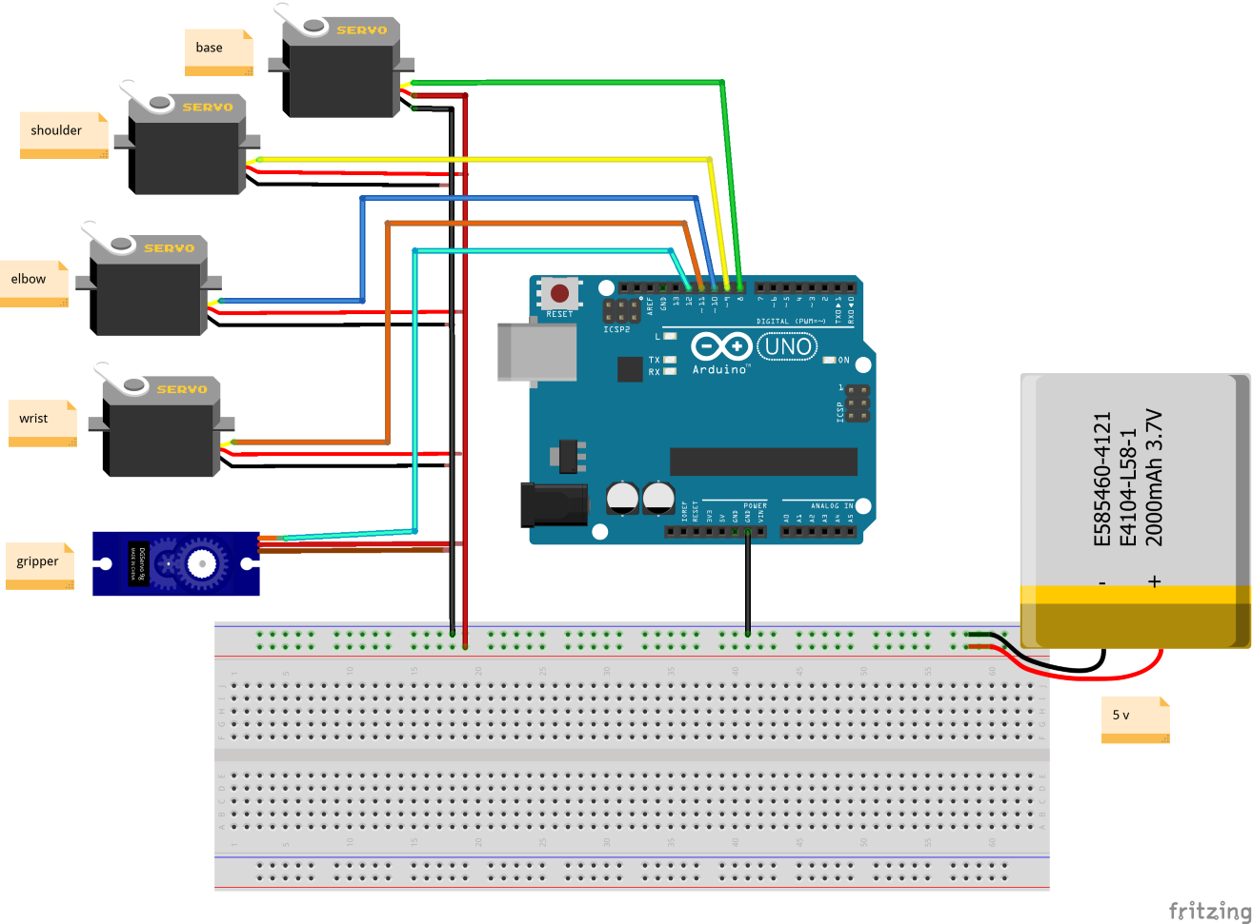
通过rosserial_arduino实现ROS与Arduino底层电机控制的无缝通信
支持ROS Kinetic、Melodic、Noetic多个发行版
提供详细的启动脚本和配置文件,方便快速上手
开源社区活跃,有丰富的文档和示例代码
技术规格
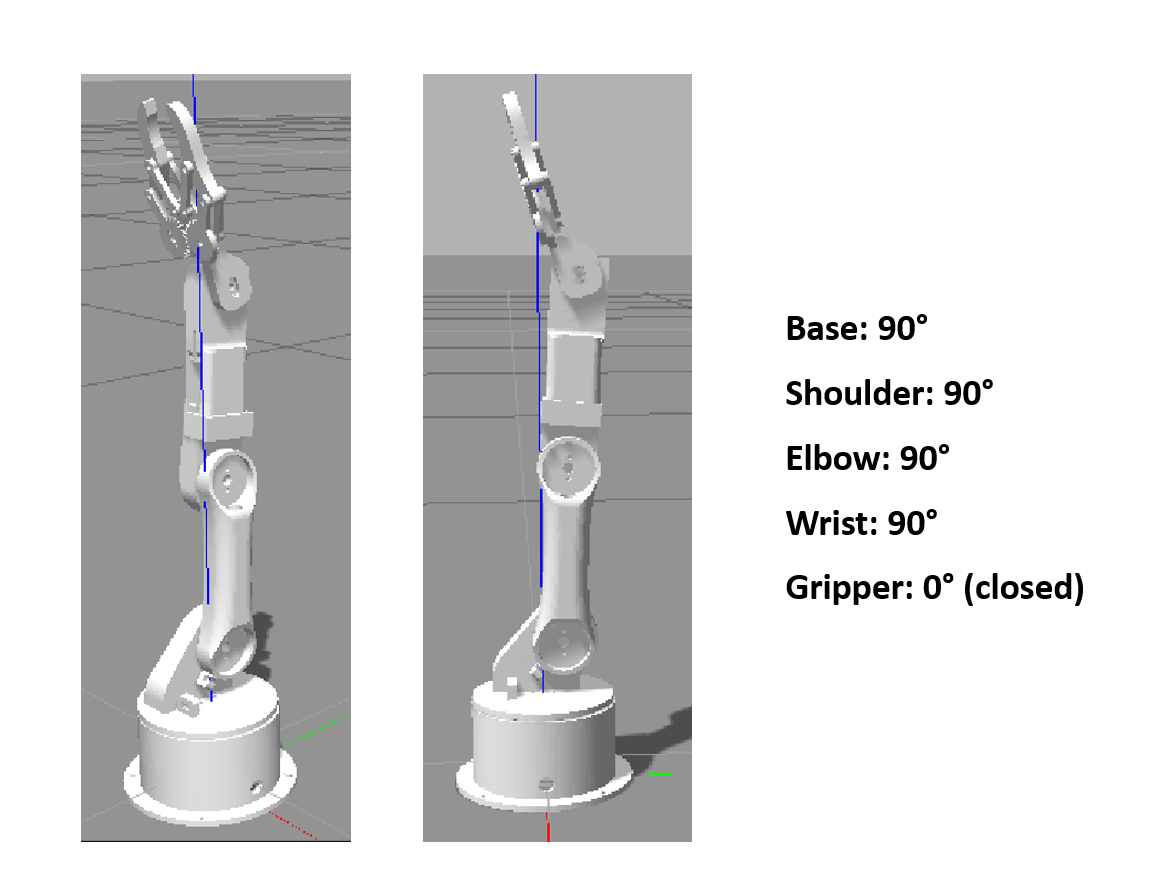
| 自由度 | 5 |
|---|---|
| 支持ROS发行版 | Kinetic / Melodic / Noetic |
| 运动学求解器 | KDL (Kinematics and Dynamics Library) |
| 仿真环境 | Gazebo |
| 运动规划框架 | Moveit |
| 通信协议 | rosserial_arduino |
| 控制话题 | /joint_states |
| 硬件平台 | Arduino (兼容rosserial) |
| 编程语言 | Python / C++ |
| 操作系统 | Ubuntu 16.04 / 18.04 / 20.04 |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| Arduino开发板 | 1 | — | 如Arduino Uno/Mega |
| 舵机(5个自由度) | 5 | — | 具体型号参考项目文档 |
| 机械臂结构件套件 | 1 | — | 3D打印或成品套件 |
| 舵机电源模块 | 1 | — | 根据舵机电压选择 |
| 杜邦线/排线 | 若干 | — | 用于Arduino与舵机连接 |
| USB数据线 | 1 | — | 连接Arduino与电脑 |
3D 模型
能力画像
**记忆与知识检索**:3/5 — 需要查阅ROS、Moveit和Arduino相关文档,但项目本身提供了较完整的启动指南
**动手与操作**:4/5 — 需要组装机械臂硬件、连接电路、调试舵机,动手环节较多
**编程与算法**:4/5 — 涉及ROS节点编写、运动学配置、Arduino固件编程,需要一定的编程基础
**设计与建模**:2/5 — 项目已提供现成的机械臂模型和URDF文件,无需从零设计
**实验与调试**:4/5 — 需要在Gazebo仿真和真实硬件之间反复调试,排查通信和运动规划问题
**协作与分享**:3/5 — 可通过GitHub提交Issue或PR,但项目本身更偏向个人学习实践
**学习与研究**:5/5 — 涵盖了ROS、Moveit、运动学、仿真、嵌入式控制等多个机器人核心技术领域
**系统集成**:4/5 — 需要将ROS上层规划与Arduino底层控制无缝集成,涉及软硬件协同
项目图库
所需技能
基础Linux操作(Ubuntu系统使用)
ROS基本概念(节点、话题、服务、参数)
Python或C++编程基础
Arduino编程与硬件连接
基础机器人运动学知识(正逆运动学)
Git版本控制基础
3D打印或机械组装能力(可选)
适用场景
机器人技术课程教学与实验
个人机器人爱好者入门ROS与机械臂控制
高校或科研机构的机器人原型验证
创客空间或机器人竞赛的硬件平台
工业机械臂控制技术的教学演示
基于ROS的机器人系统集成学习项目