搜索 "os" 找到 345 个结果
Lafayette College OpenDog四足机器人图纸、MATLAB和ROS Python代码仓库。
基于ROS 2的开源AMR平台,负载80kg,支持机械臂集成。
开源智能家居框架,通过边缘计算和LLM实现自然语言控制,具备pri功能。
该仓库包含使用Arduino Uno和PCA9685开发的双足机器人代码。
HiWonder LeArm 6DOF机械臂套件配合ESP32 WROOM 32D实现全功能。
开源机械臂列表,供研究者和开发者使用。
开源5自由度机械臂项目,含SolidWorks CAD、ROS 2与Gazebo仿真、MATLAB Simscape。
基于开源软件和低成本硬件的家庭自动化系统。
ROS包:在Gazebo和Rviz中模拟可视化Stanford Doggo四足机器人。
开源边缘AI机器人平台,集成多传感器融合、设备端智能与ROS 2,基于Raspber构建。
ΠΑΝ:个人AI网络,22传感器可穿戴设备,始终在线语音控制手机、电脑和浏览器。
Netryx 是本地化地理定位工具,用计算机视觉识别精确位置。
开源机械臂项目,使用ROS2和Arduino。
3D打印机械臂,基于Raspberry Pi、ROS和Python,开源LiteArmi2。
ROS是开源机器人系统开发框架,提供工具。
开源C++四轴飞行控制器,核心理念:无需复杂。
开源低成本四足机器人,ESP32控制,PyBullet仿真。
可扩展开源智能家居系统,含定制Zigbee网关(Orange Pi+CC2652P7)、Mesh路由及入墙设备。
该仓库包含基于Espressif的定制开发板完整开源硬件设计。
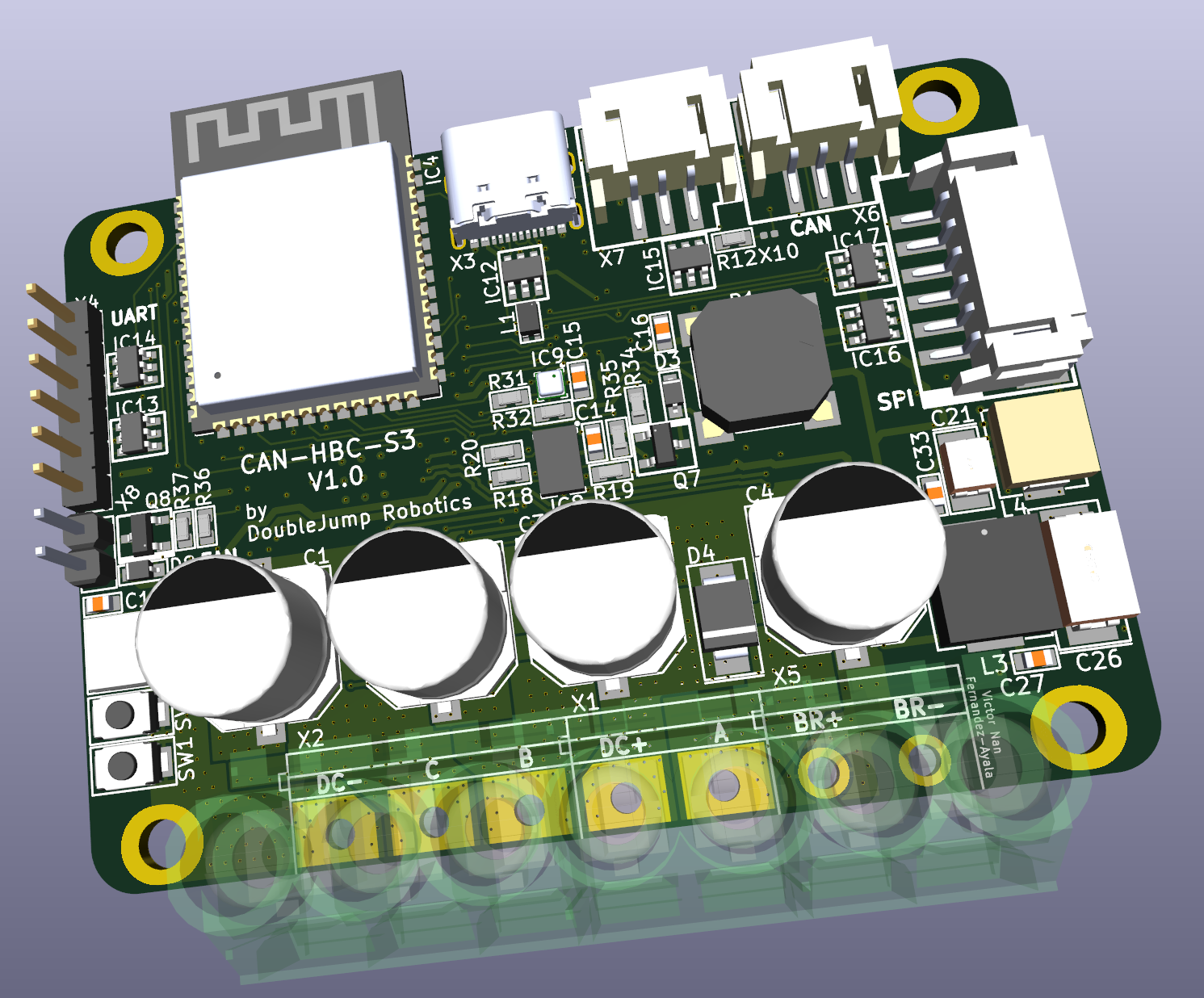
开源ESP32-S3高性能低成本BLDC电机控制器,支持FOC。