Dynominion 自主移动机器人平台
dynominion
ROS、机械臂
3/5
🧩 软硬件结合
已发布

项目简介
基于ROS 2的开源AMR平台,负载80kg,支持机械臂集成。
基于ROS 2的开源自移动机器人平台,具备80公斤负载能力,支持机械臂集成与模块化硬件,适用于机器人教育与应用研究。
项目特点
**高有效https://raw.githubusercontent.com/TeamRobotoAI/dynominion/main/dynominion_description/README.md)便进行学术研究。
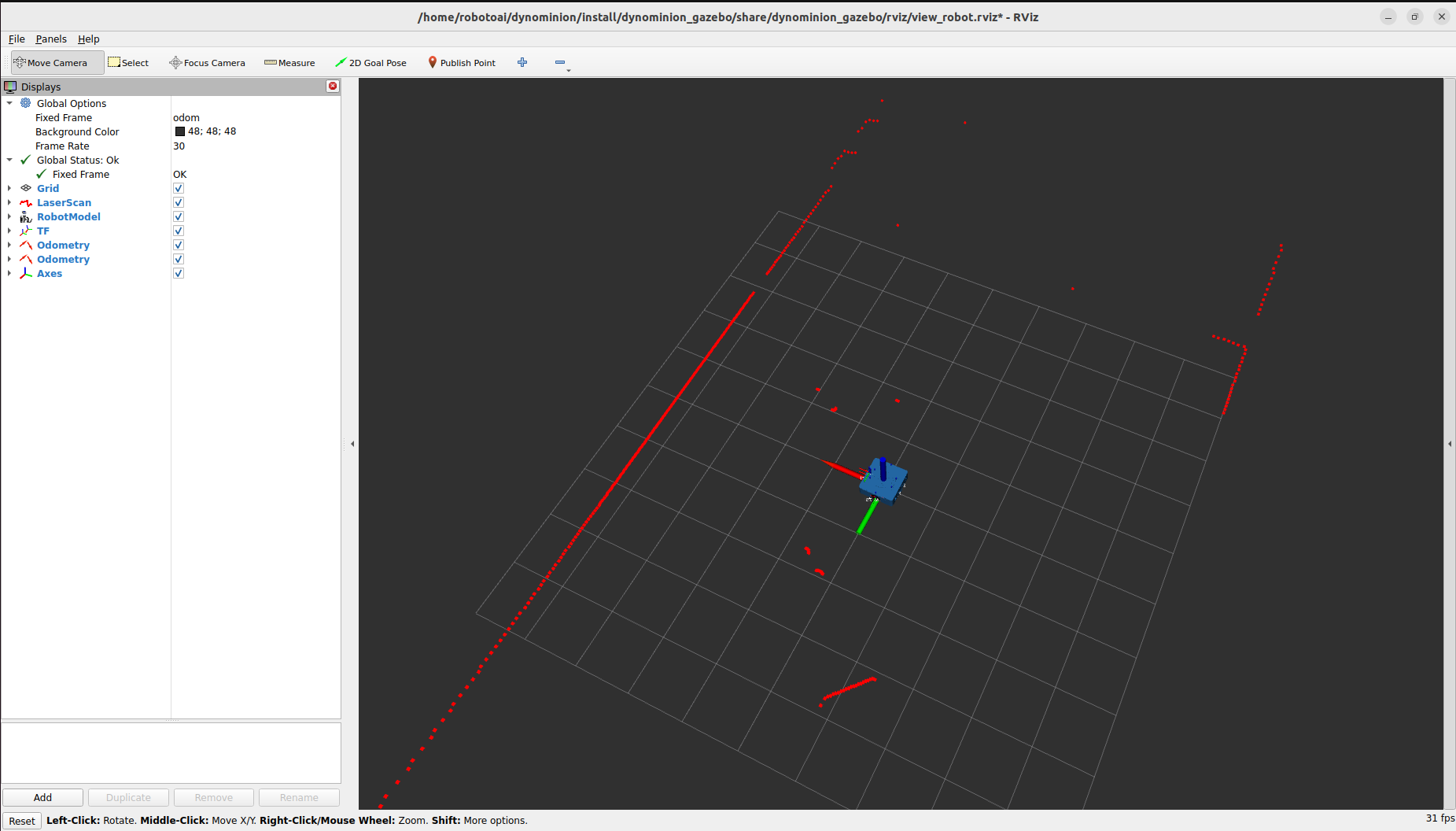
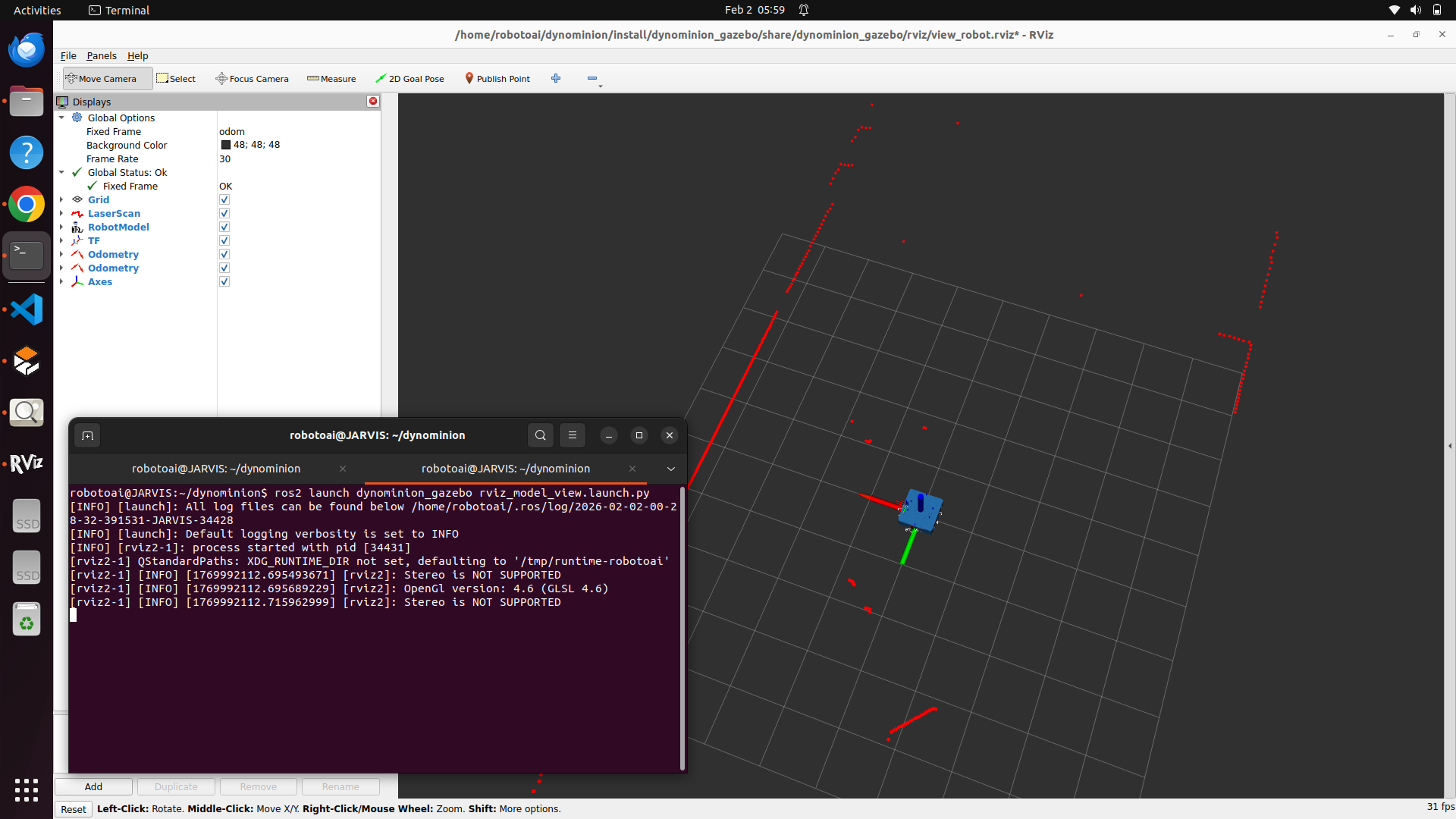
**ROS 2 集成**:基于最新的https://raw.githubusercontent.com/TeamRobotoAI/dynominion/main/dynominion_gazebo/README.md)虚拟机器人模型,支持在无实体硬件的情况下进行https://raw.githubusercontent.com/TeamRobotoAI/dynominion/main/dynominion_navigation/README.md)
技术规格
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| 待采集 | 待采集 | — | 待采集 |
3D 模型
能力画像
⚪ 记忆与知识检索: 2/5
🔵 逻辑推演: 4/5
⚪ 表达与交流: 1/5
⚪ 感知与观察: 2/5
🔵 数理与计算: 4/5
🔵 动手与操作: 5/5
⚪ 狂热与坚持: 3/5
🔵 创造与创新: 4/5
项目图库














所需技能
🔧 **动手能力**:需要具备组装和调试机器人硬件的能力,包括机械结构、电机、传感器和机械臂的集成。
💻 **编程能力**:需要熟悉 ROS 2 框架、C++ 或 Python 编程,以及 Linux 系统操作。
⚡ **电子电路**:需要了解基本的电子电路知识,能够连接和调试电机驱动器、传感器等电子元件。
适用场景
**机器人教育**:作为教学平台,帮助学生理解自主移动机器人的原理和开发流程。
**应用研究**:用于研究机器人导航、SLAM、机械臂控制、人机交互等前沿课题。
**原型开发**:作为快速原型开发平台,验证新的机器人算法和硬件设计。