HiWonder LeArm 开源项目
hiwonder-learm-open-source
机械臂、ESP32
2/5
🧩 软硬件结合
已发布

项目简介
HiWonder LeArm 6DOF机械臂套件配合ESP32 WROOM 32D实现全功能。
一个旨在让HiWonder LeArm 6自由度机械臂套件与ESP32 WROOM 32D完全兼容的项目。此仓库收集了库文件、固件、Arduino草图、翻译文档和故障排除笔记,以克服语言障碍和出厂默认功能失效问题。
标签
项目特点
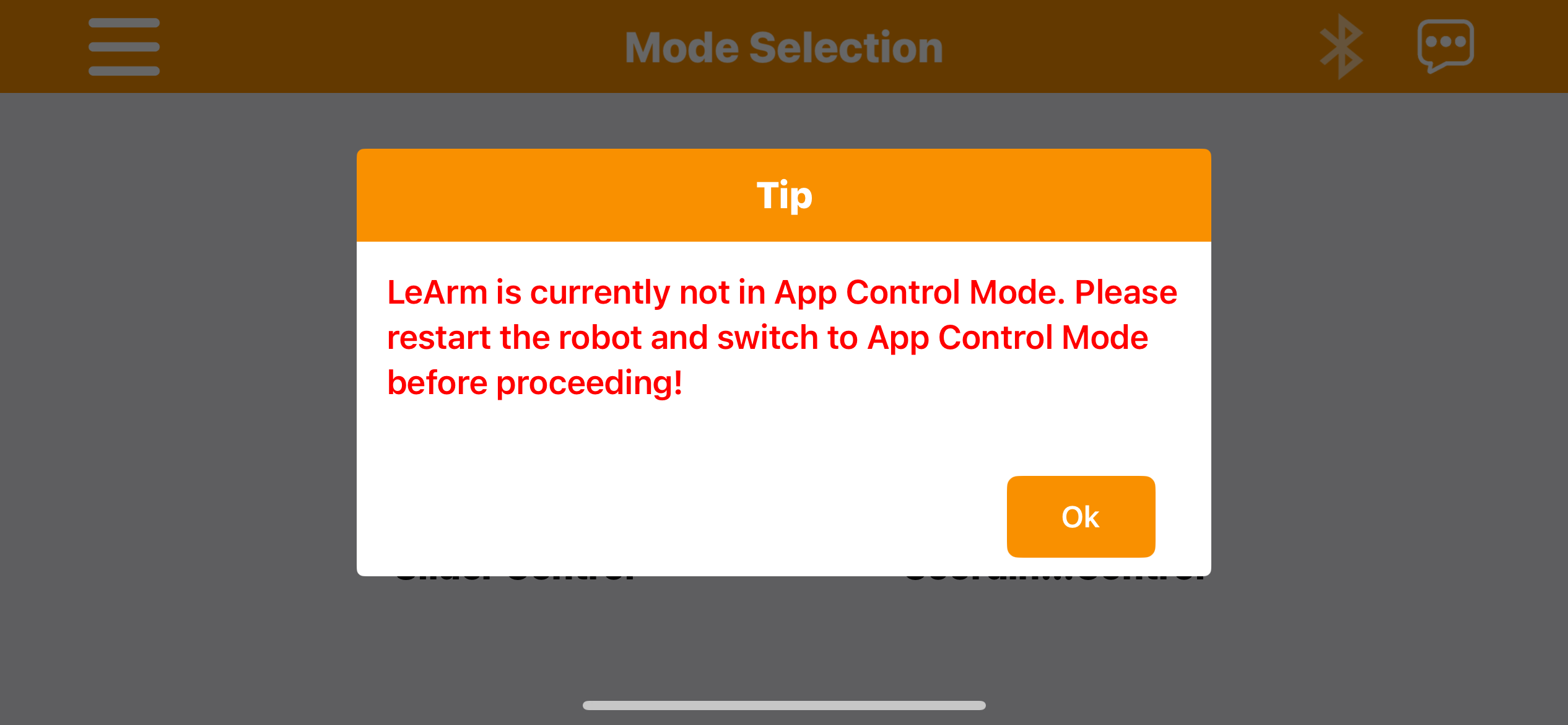
**完整的故障排除记录**:详细记录了从零开始到成功驱动机械臂的每一步,包括遇到的硬件和软件问题及解决方案。
**工厂固件恢复**:提供了从官方获取的工厂默认固件,并分享了使用Arduino Cloud Editor成功编译和上传的步骤。
**文档翻译**:将原始的中文电路图和文档翻译成英文,方便全球用户理解和调试。
**社区驱动**:鼓励社区贡献,旨在创建一个集修复、改进和资源共享于一体的开源项目。
**硬件兼容性验证**:验证了HiWonder LeArm套件与ESP32 WROOM 32D的兼容性,并解决了相关的驱动和库问题。
技术规格
| 机械臂型号 | HiWonder LeArm 6DOF Robotic Arm Kit |
|---|---|
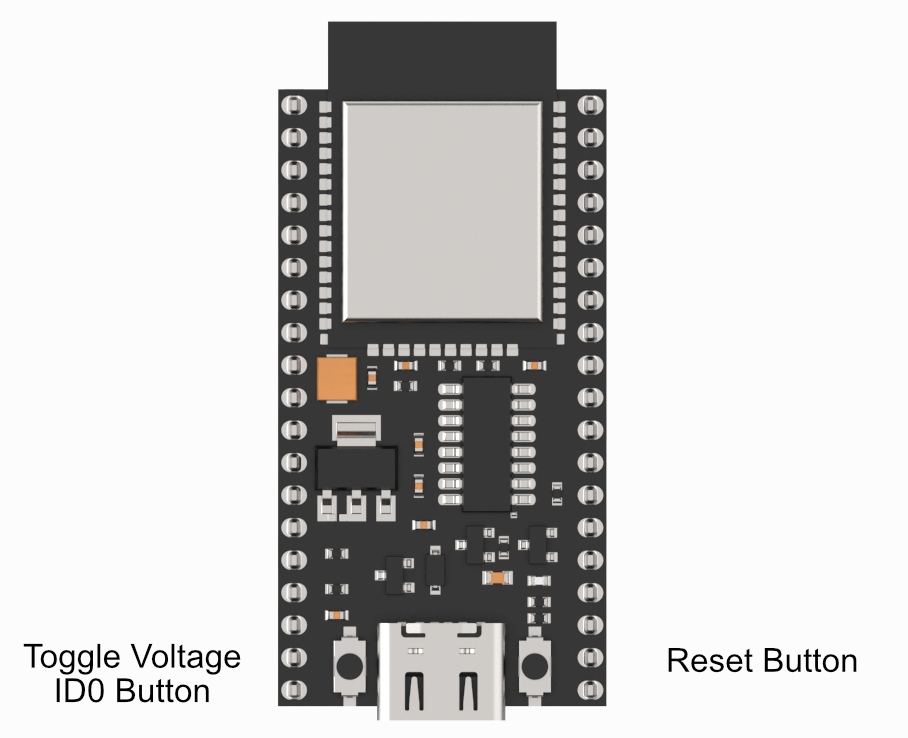
| 主控芯片 | ESP32 WROOM 32D |
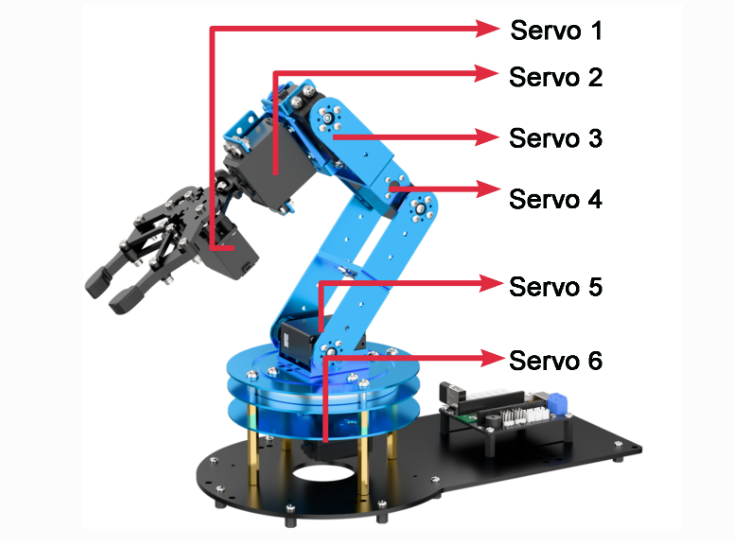
| 自由度 | 6 |
| 舵机类型 | LDX-218 (轴4,5), LD-1501 MG (轴6), LDX-335 MG (轴1), LFD-06 MG (轴2,3) |
| 舵机旋转范围 | 0-180° |
| 舵机精度 | 0.3° |
| 舵机旋转速度 | 0.16-0.25 sec/60° (7.4v) |
| 舵机堵转扭矩 | 6-20 kg.cm (7.4v) |
| 开发环境 | Arduino IDE (不推荐) / Arduino Cloud Editor (推荐) |
| ESP32板支持包 | Espressif ESP32 by Espressif Systems v3.3.2 |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| HiWonder LeArm 6DOF 机器人机械臂套件 | 1 | — | 包含所有机械和电子部件 |
| ESP32 WROOM 32D | 1 | — | 集成在套件中 |
| LDX-218 | 2 | — | 用于轴4和轴5 |
| LD-1501 MG | 1 | — | 用于轴6 |
| LDX-335 MG | 1 | — | 用于轴1 |
| LFD-06 MG | 2 | — | 用于轴2和轴3 |
| PS2手柄 | 1 | — | 套件附带 |
| 电源适配器 | 1 | — | 套件附带 |
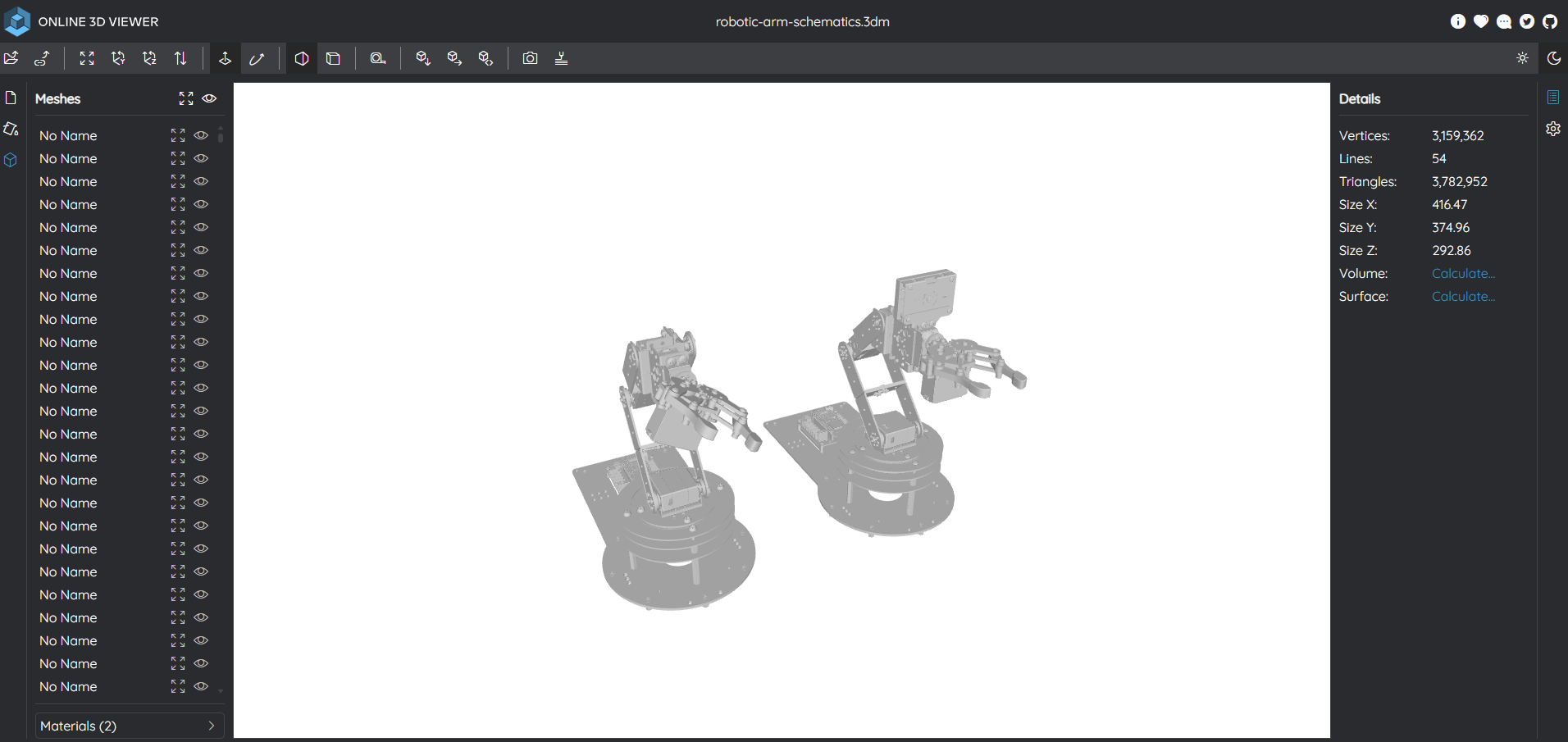
3D 模型
能力画像
⚪ 记忆与知识检索: 2/5
🔵 逻辑推演: 4/5
⚪ 表达与交流: 2/5
⚪ 感知与观察: 3/5
⚪ 数理与计算: 3/5
🔵 动手与操作: 4/5
⚪ 狂热与坚持: 5/5
⚪ 创造与创新: 3/5
项目图库

所需技能
🔧 **动手能力**:需要能够按照说明书精确组装机械臂,涉及螺丝固定和线缆连接。
💻 **编程能力**:需要熟悉Arduino IDE或Arduino Cloud Editor,能够处理库依赖和编译错误。
⚡ **电子电路**:需要能够阅读和理解电路图(中英文),进行基本的故障排查。
适用场景
**机器人学习与研究**:作为学习6自由度机械臂运动学、控制算法和嵌入式开发的实践平台。
**STEM教育**:适合作为大学或高级中学的机器人课程项目,让学生体验从硬件组装到软件调试的全过程。
**开源硬件修复**:对于购买了HiWonder LeArm但遇到类似问题的用户,本项目提供了完整的解决方案和故障排除指南。
**二次开发**:基于ESP32平台,开发者可以修改固件,添加自定义功能,如视觉识别、语音控制等。