Guará Nano 超低成本四足机器人
guara-nano
ESP32
1/5
🧩 软硬件结合
已发布
项目简介
开源低成本四足机器人,ESP32控制,PyBullet仿真。
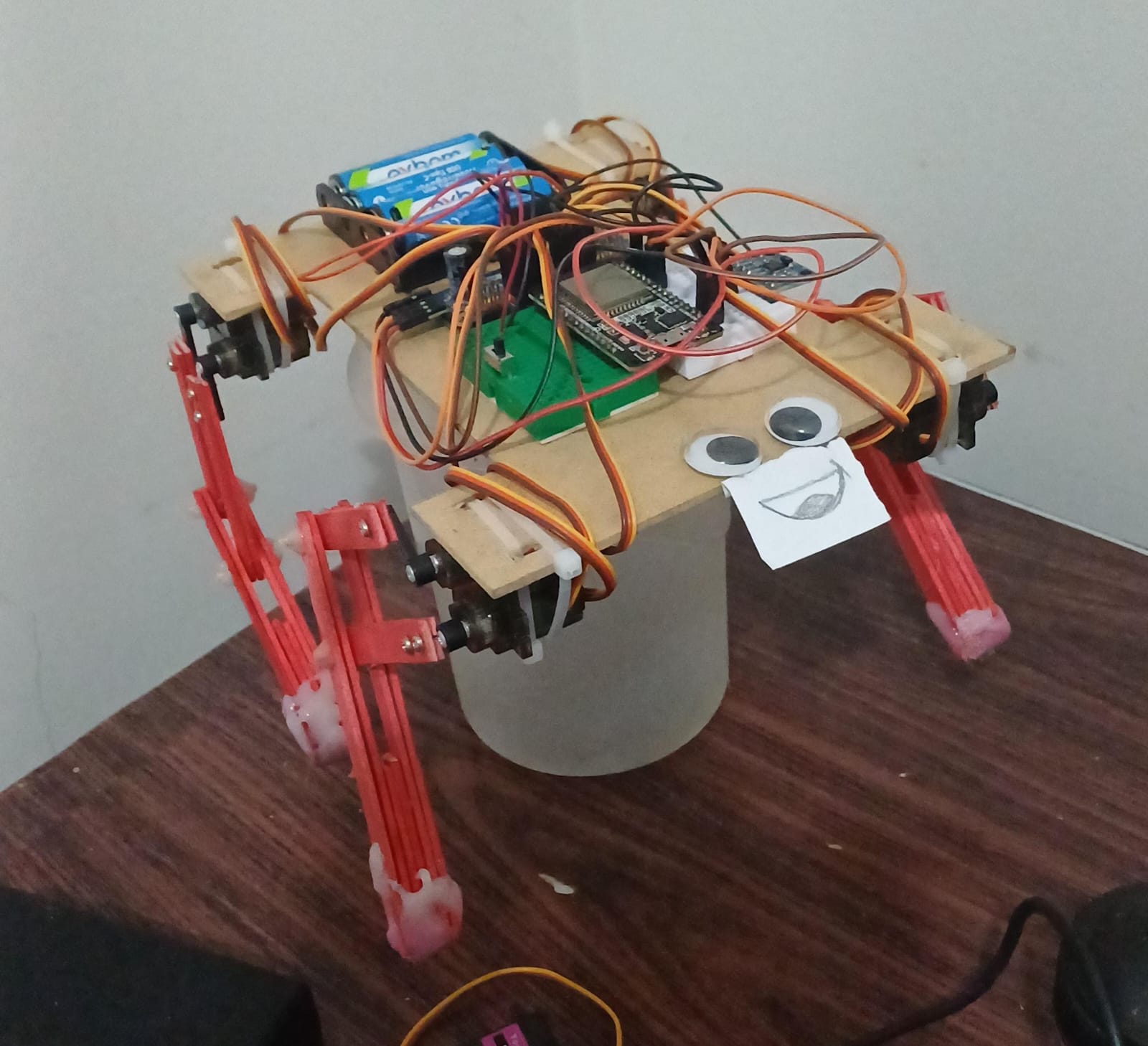
采用易获取材料构建的超低成本开源四足机器人,具备ESP32控制、PyBullet仿真和安卓应用。
标签
项目特点
**超低成本**:硬件总成本极低,使用MDF板、冰棒棍、牙签等常见材料,舵机选用SG90/MG90S等廉价型号。
**开源完整**:固件、App、仿真全部开源,代码模块化,便于学习和修改。
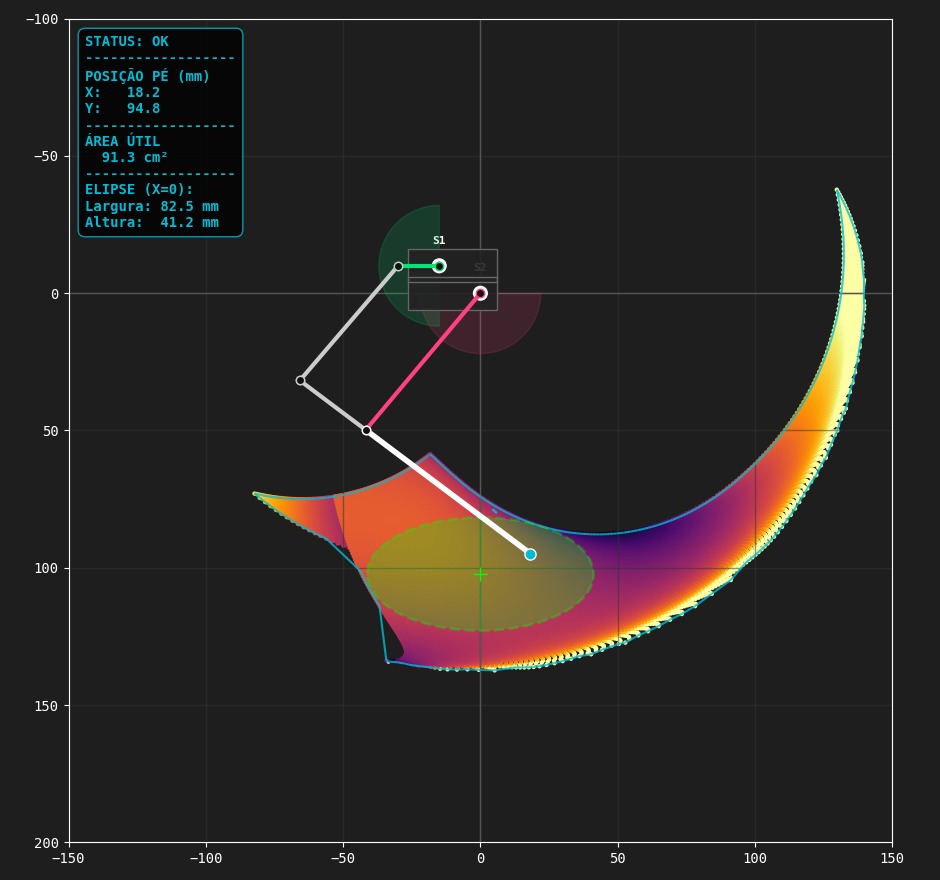
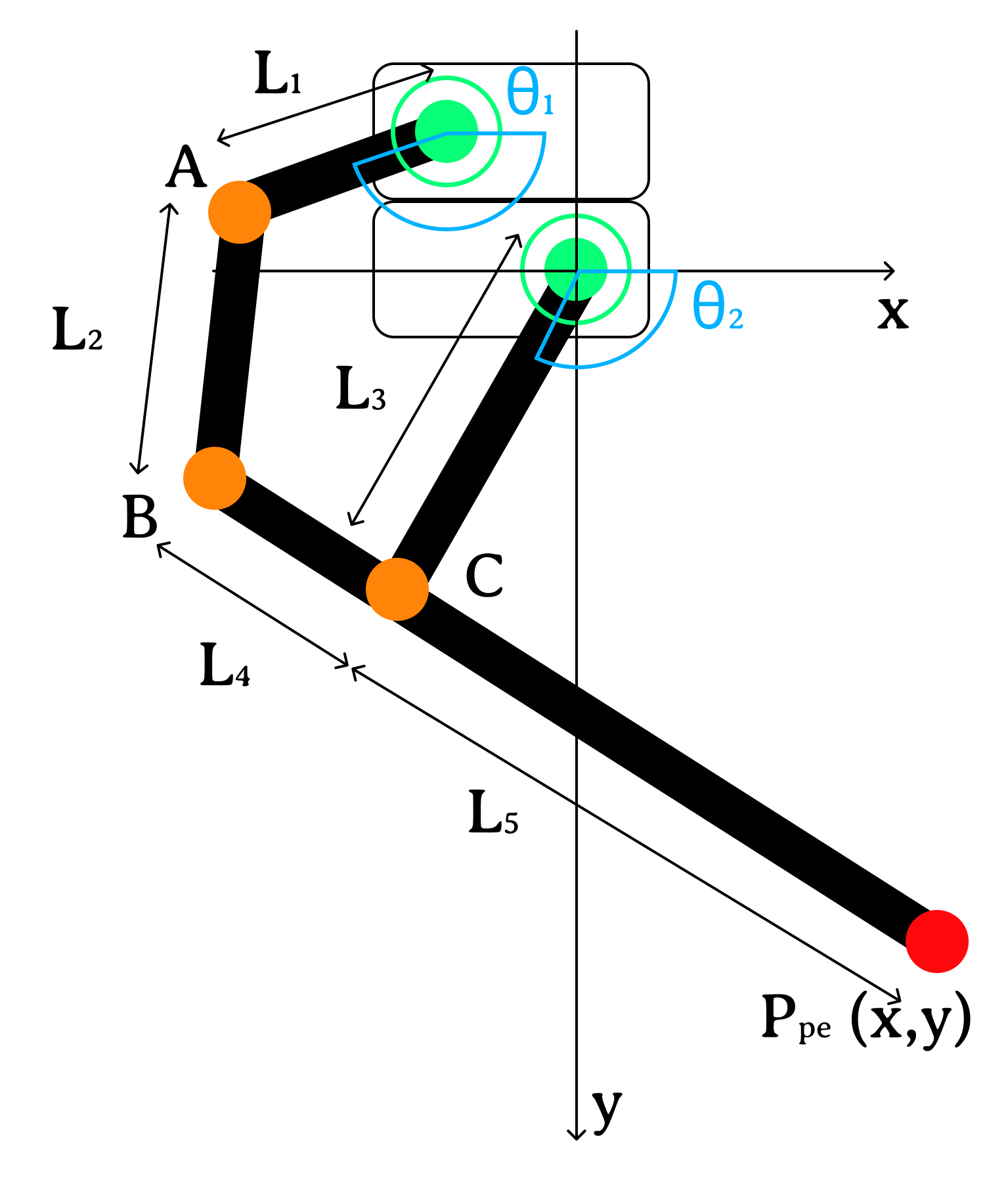
**软件补偿硬件**:通过逆运动学、轨迹规划和IMU稳定算法,弥补廉价硬件的精度不足。
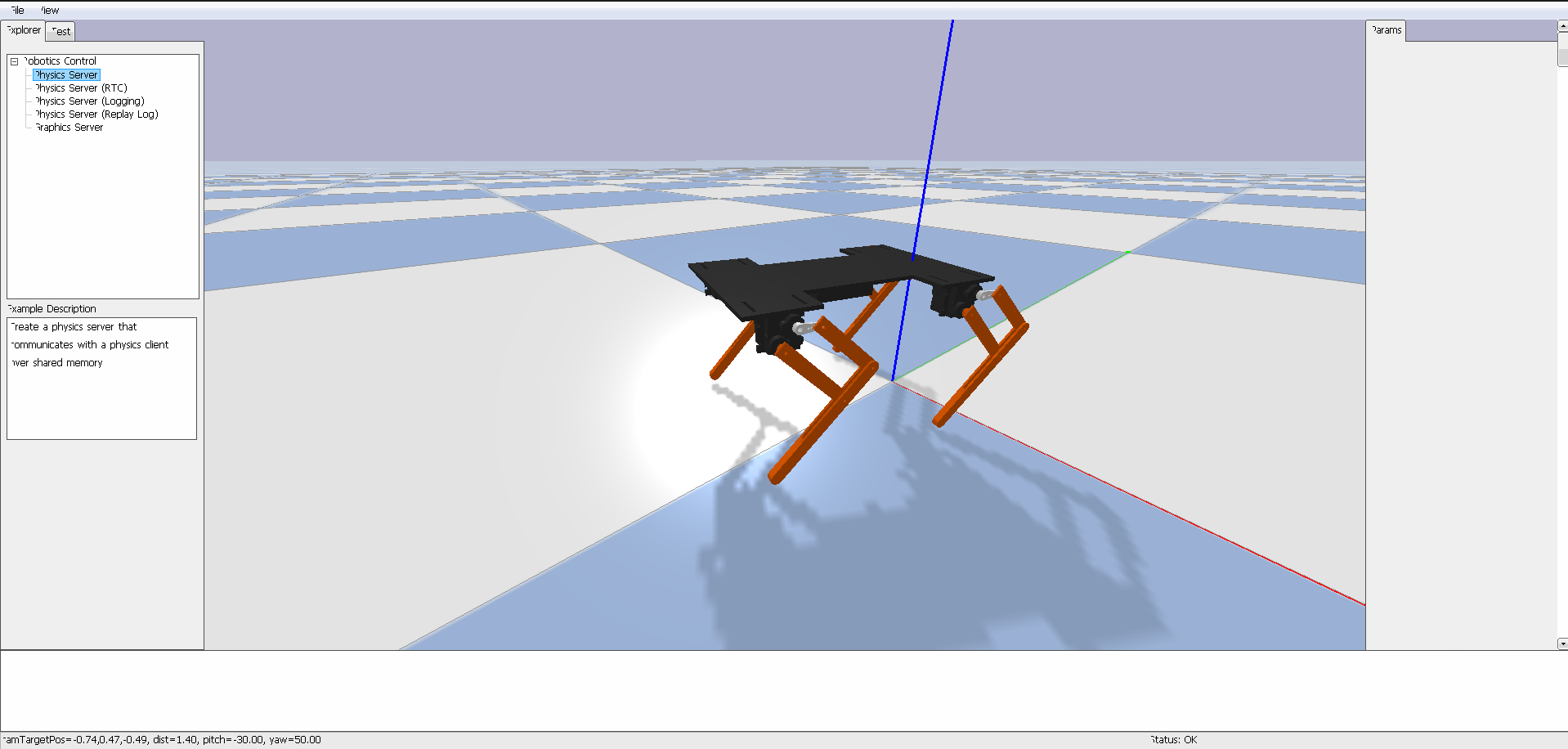
**多平台支持**:支持ESP32实体运行和PyBullet仿真测试,方便调试。
**移动端遥控**:提供React Native编写的Android App,通过BLE蓝牙遥控并显示传感器遥测数据。
技术规格
| 主控芯片 | ESP32(支持蓝牙和WiFi) |
|---|---|
| 舵机 | 8x SG90 或 MG90S(每条腿2个) |
| IMU传感器 | MPU6050(六轴姿态传感器) |
| 供电 | 4节AA电池(6V)给舵机,ESP32通过USB或稳压模块供电 |
| 结构材料 | MDF板、冰棒棍、牙签、扎带、热熔胶 |
| 固件语言 | C++(PlatformIO) |
| 遥控App | React Native(Android) |
| 仿真环境 | Python + PyBullet |
| 运动算法 | 逆运动学、步态规划、IMU姿态稳定 |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| ESP32开发板 | 1 | — | 支持蓝牙 |
| SG90 或 MG90S | 8 | — | 每条腿2个 |
| MPU6050 IMU模块 | 1 | — | 姿态检测 |
| 4节AA电池盒 | 1 | — | 6V输出给舵机 |
| MDF板 | 1块 | — | 机身主体 |
| 冰棒棍 | 若干 | — | 腿部件 |
| 牙签 | 若干 | — | 关节轴 |
| 扎带 | 若干 | — | 固定结构 |
| 热熔胶棒 | 若干 | — | 粘合结构 |
| 舵机附带螺丝 | 1套 | — | 固定舵机 |
| 杜邦线/导线 | 若干 | — | 电路连接 |
| 面包板 | 1 | — | 电路原型(可选) |
3D 模型
能力画像
⚪ 记忆与知识检索: 2/5
🔵 逻辑推演: 4/5
⚪ 表达与交流: 1/5
⚪ 感知与观察: 2/5
🔵 数理与计算: 4/5
🔵 动手与操作: 4/5
⚪ 狂热与坚持: 3/5
🔵 创造与创新: 3/5
项目图库





所需技能
🔧 **动手能力**:需要手工切割和组装MDF板、冰棒棍等结构件,使用热熔胶和扎带固定,安装舵机和传感器。
💻 **编程能力**:需要C++(PlatformIO)编写固件,Python运行仿真,以及React Native开发App(可选)。
⚡ **电子电路**:需要连接ESP32、舵机、IMU和电池,理解基本电路和供电设计。
适用场景
机器人爱好者学习四足机器人运动学和控制的低成本入门项目
高校或创客空间的教学实验平台,用于逆运动学、步态规划、IMU融合等课程
作为更高级四足机器人(如Guará Mini)的前期验证和原型开发
展示“软件补偿硬件”思想的极简机器人案例