基于树莓派的LiteArmi2机械臂
raspberrypi-LiteArmi2
ROS、机械臂
3/5
🧩 软硬件结合
已发布

项目简介
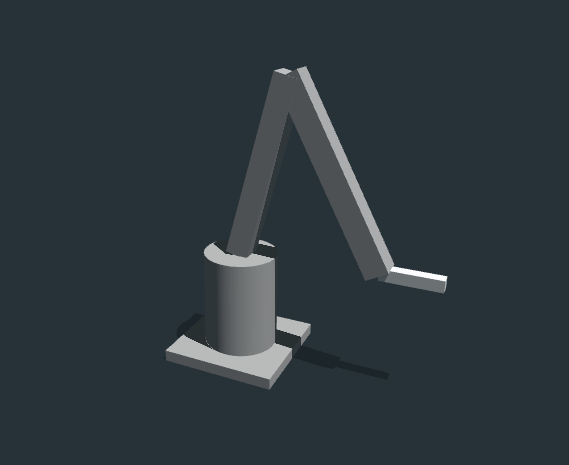
3D打印机械臂,基于Raspberry Pi、ROS和Python,开源LiteArmi2。
基于树莓派、ROS和Python的3D打印机械臂,源自开源LiteArmi2项目。
项目特点
**3D打印框架**:基于开源LiteArmi2设计,易于定制和复制
**树莓派控制**:使用树莓派作为主控制器,成本低、生态丰富
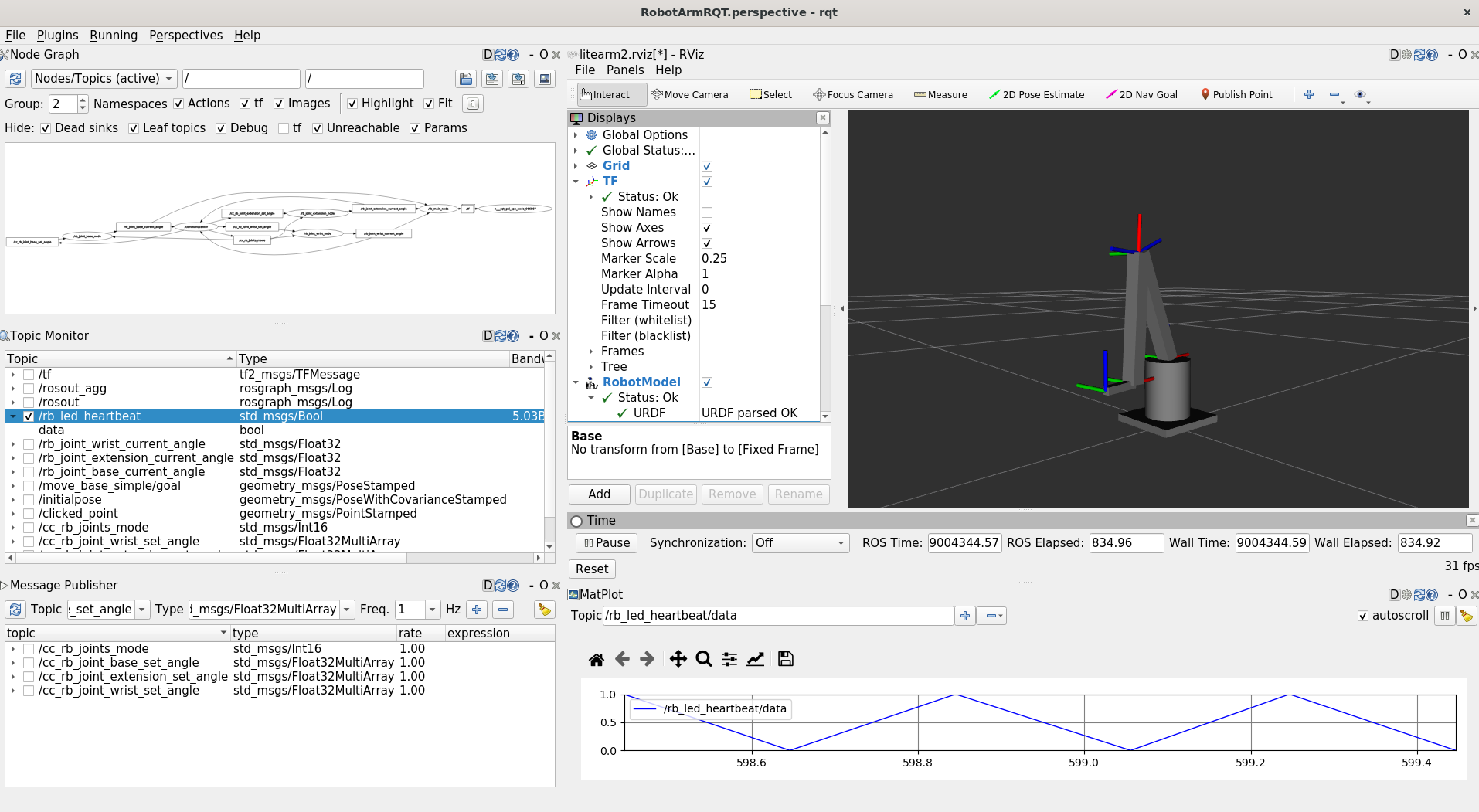
**ROS集成**:完整支持ROS,包括URDF模型、RVIZ可视化和多机通信
**定制PCB扩展板**:设计了专用的树莓派扩展板(Hat),整合了电源和控制电路
**Python编程**:所有软件代码使用Python编写,易于理解和修改
**远程控制**:支持通过以太网远程控制机械臂
**实时可视化**:提供RQT和RVIZ界面,可实时查看机械臂状态和运动轨迹
技术规格
| 自由度 | 3R(3个旋转关节),带旋转底座 |
|---|---|
| 框架材料 | 3D打印(PLA或其他材料) |
| 主控制器 | Raspberry Pi(任意型号) |
| 执行器 | 3个舵机(Servo Motors) |
| 电源 | 5V直流电源供电 |
| 通信方式 | 以太网 |
| 操作系统 | ROS(机器人操作系统) |
| 编程语言 | Python |
| 控制算法 | 正向运动学、梯形速度控制 |
| 软件功能 | ROS节点、远程控制、心跳检测、LED信号指示 |
| 未来升级 | 支持末端执行器(如电磁铁) |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| Raspberry Pi | 1 | — | 任意型号 |
| 舵机(Servo) | 3 | — | 用于底座、延伸臂和腕部 |
| 万用板(14x20) | 1 | — | 用于制作扩展板 |
| 11x1排针(公头) | 1 | — | 用于连接舵机 |
| 20x2排母(母头) | 1 | — | 用于连接树莓派GPIO |
| DC电源插座 | 1 | — | 用于5V电源输入 |
| 电解电容 | 1 | — | 电源去耦 |
| 普通电容 | 1 | — | 电源去耦 |
| 红色LED | 1 | — | 心跳指示灯 |
| 91欧姆电阻 | 1 | — | LED限流 |
| 电源线 | 1 | — | 连接电源 |
| 以太网线 | 1 | — | 通信连接 |
| 实心导线(红/绿/黄) | 若干 | — | 5V、地线和信号线连接 |
能力画像
⚪ 记忆与知识检索: 2/5
🔵 逻辑推演: 3/5
⚪ 表达与交流: 1/5
⚪ 感知与观察: 2/5
⚪ 数理与计算: 3/5
🔵 动手与操作: 4/5
⚪ 狂热与坚持: 3/5
⚪ 创造与创新: 3/5
项目图库


所需技能
🔧 **动手能力**:需要3D打印、电路焊接、机械组装等动手能力,能够制作和调试硬件
💻 **编程能力**:需要Python编程基础,了解ROS框架和命令行操作,能够配置网络和调试多机通信
⚡ **电子电路**:需要基本的电路知识,能够理解电源去耦、GPIO引脚分配和舵机控制原理
适用场景
**机器人教育**:作为学习机器人学、ROS和嵌入式系统的实践项目
**自动化实验**:用于实验室中的小型自动化任务,如物品搬运、分拣等
**创客项目**:适合创客和爱好者制作自己的低成本机械臂
**ROS学习**:作为学习ROS多机通信、URDF建模和RVIZ可视化的入门项目