CAN-HBC S3 高功率无刷电机控制器
CAN-HBC-S3
ESP32
3/5
🧩 软硬件结合
已发布
项目简介
开源ESP32-S3高性能低成本BLDC电机控制器,支持FOC。
一个基于ESP32-S3的高性能低成本开源无刷直流电机控制器,用于磁场定向控制。
项目特点
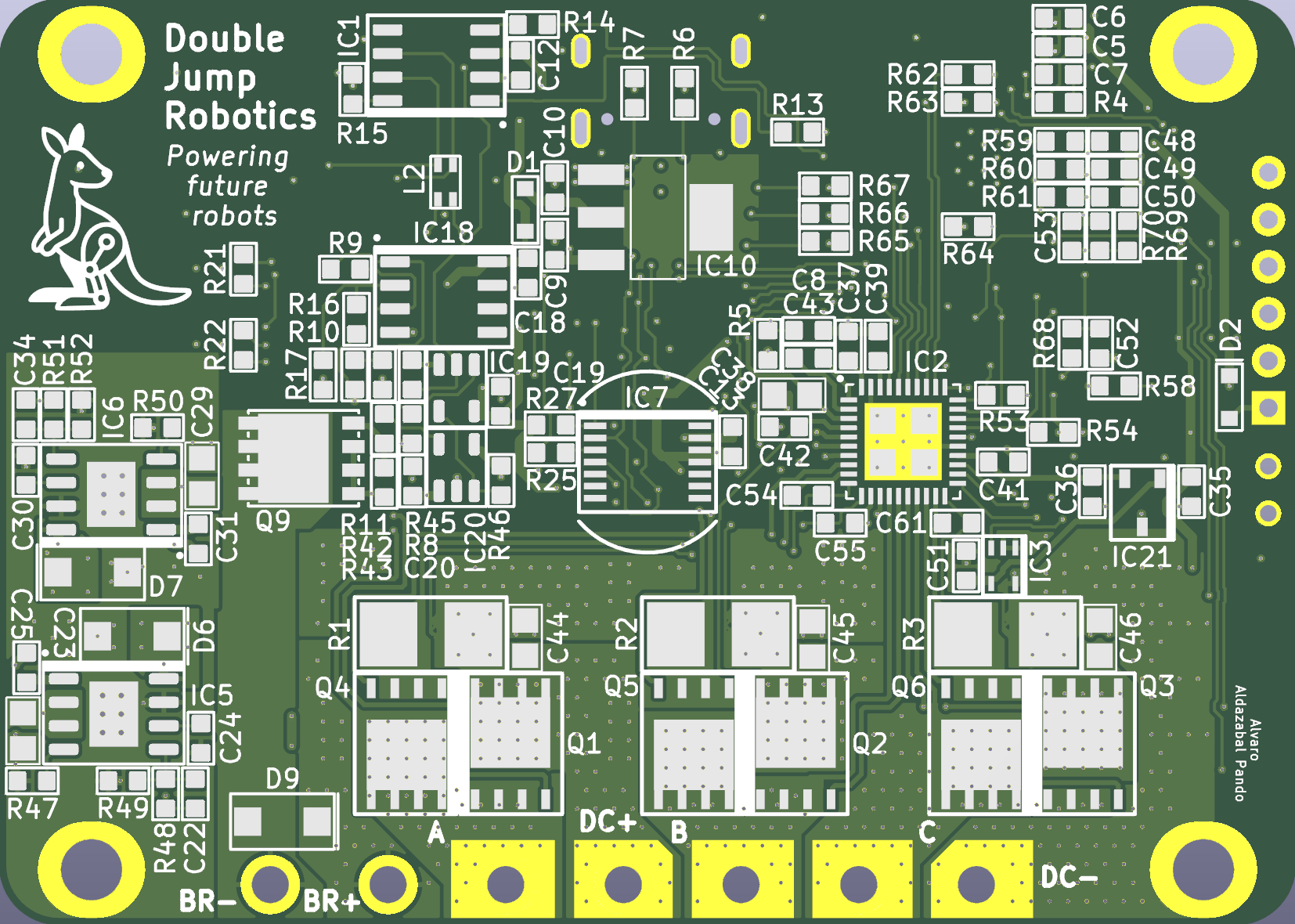
**高性能功率级**:支持高达 12S(50.5V)母线电压,目标连续电流 20A(自然冷却)/ 40A(带散热片),采用 TPH1R306PL1 MOSFET 和三相低值分流电阻(开尔文布线)。
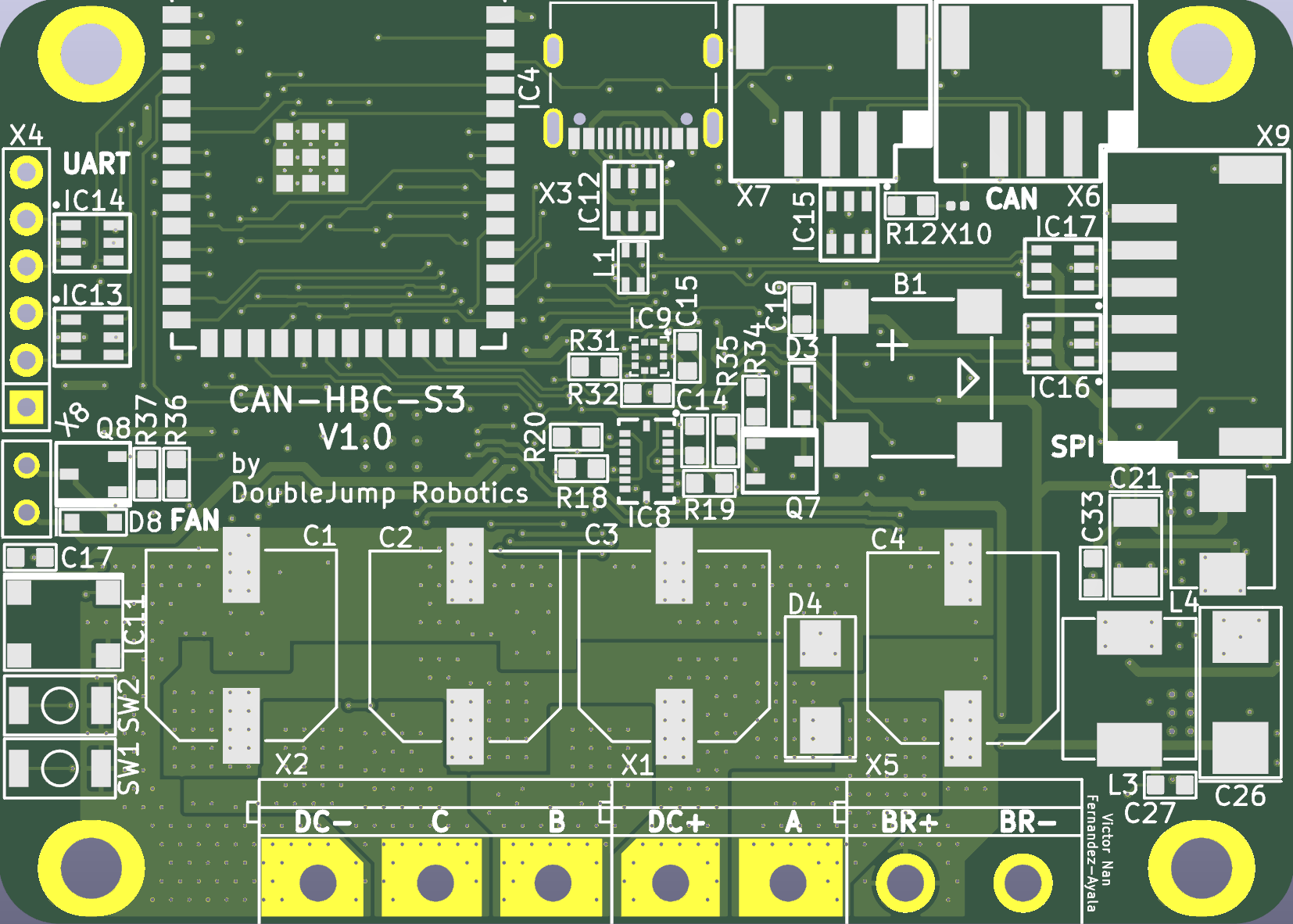
**丰富的控制与I/O**:搭载 ESP32-S3-WROOM-1 模块,提供原生 USB-C 接口、双端口 CAN 总线、板载磁编码器(AS504x 系列)、BMI088 IMU 和 BMP388 传感器,以及风扇接口、蜂鸣器、RGB LED 和按钮。
**优化的机械设计**:4层 PCB,尺寸 70×50mm,M3 安装孔距 60×44mm,MOSFET 和分流电阻位于背面,便于与 ODrive S1 散热片耦合。
**兼容 SimpleFOC 固件**:支持 3 分流相电流检测、SPI 编码器、CAN 和 UART 接口,提供清晰的引脚映射和示例代码。
**面向网络化机器人**:双端口 CAN 接口支持多节点通信,ESP-NOW 无线控制模式为机器人实验提供低延迟选项。
**全面的安全特性**:硬件过压钳位制动斩波器、软件过流/过压保护、通信看门狗超时、电机堵转检测。
技术规格
| 主控芯片 | ESP32-S3-WROOM-1 模块 |
|---|---|
| 母线电压 | 最高 12S (50.5V) |
| 连续电流 | 20A (自然冷却) / 40A (带散热片) |
| 峰值电流 | 更高短时峰值 |
| MOSFET | TPH1R306PL1 |
| 相电流检测 | 3 路低值分流电阻 (开尔文布线) |
| 制动斩波器 | 支持,带硬件过压钳位 |
| CAN 接口 | 双端口 |
| 板载编码器 | AS504x 系列磁编码器 (背面) |
| 附加传感器 | BMI088 IMU, BMP388 压力/温度传感器 |
| 通信接口 | USB-C (原生), CAN, UART, ESP-NOW |
| PCB 层数 | 4 层 |
| PCB 尺寸 | 70 × 50 mm |
| 安装孔距 | 60 × 44 mm (M3) |
| 散热兼容性 | ODrive S1 散热片 |
| 固件兼容性 | SimpleFOC 2.3.5+ |
| 组装优化 | JLCPCB (LCSC 零件, CPL, Gerber 文件) |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| ESP32-S3-WROOM-1 模块 | 1 | — | 核心控制单元 |
| TPH1R306PL1 | 6 | — | 三相桥式电路 |
| AS504x 系列磁编码器 | 1 | — | 板载,背面安装 |
| BMI088 | 1 | — | 可选,板载 |
| BMP388 | 1 | — | 可选,板载 |
| 电解电容 + 陶瓷电容 | 若干 | — | 母线滤波和去耦 |
| 低值分流电阻 | 3 | — | 相电流检测 |
| USB-C | 1 | — | 原生 USB 接口 |
| CAN 接口 | 2 | — | 双端口 |
| 风扇接口 (2-pin) | 1 | — | 12V 小型风扇 |
| 制动电阻接口 | 1 | — | 制动斩波器 |
| 蜂鸣器 | 1 | — | 用户提示 |
| RGB LED | 1 | — | 状态指示 |
| 按钮 (BOOT/EN) | 2 | — | 用户交互 |
| ODrive S1 散热片 | 1 | — | 推荐使用,需单独购买 |
| 螺丝、垫片等 | 若干 | — | 安装固定 |
3D 模型
能力画像
⚪ 记忆与知识检索: 2/5
🔵 逻辑推演: 3/5
⚪ 表达与交流: 1/5
⚪ 感知与观察: 2/5
🔵 数理与计算: 4/5
🔵 动手与操作: 5/5
⚪ 狂热与坚持: 3/5
⚪ 创造与创新: 4/5
项目图库
所需技能
🔧 **动手能力**:需要熟练的 SMD 焊接技能,特别是 QFN 封装元件和 MOSFET 的焊接。能够进行 PCB 组装、测试和故障排查。具备使用热风枪、示波器等工具的经验。
💻 **编程能力**:需要掌握 Arduino 或 PlatformIO 开发环境,熟悉 SimpleFOC 库的使用和配置。了解 ESP32-S3 的编程和 CAN 总线通信协议。能够编写和调试电机控制固件。
⚡ **电子电路**:需要理解 BLDC 电机控制原理、FOC 算法、功率电子学(MOSFET 驱动、电流检测、散热设计)。能够阅读和理解 KiCad 原理图和 PCB 布局。具备高压电路安全操作知识。
适用场景
**机器人关节驱动**:为机器人手臂、腿足机器人等提供高扭矩、高精度的关节电机控制。
**电动执行器**:用于线性执行器、旋转执行器等需要精确位置和速度控制的场景。
**无人机和无人车**:作为动力系统的电机控制器,支持 CAN 总线网络化控制。
**工业自动化**:用于小型自动化设备、传送带、泵等需要可靠电机控制的场合。
**教育和研究**:作为学习 FOC 算法、电机控制、嵌入式系统和机器人技术的开源平台。
**DIY 和创客项目**:为个人制作的机器人、电动滑板、电动工具等提供高性能的电机驱动方案。