UMI on Legs: Making Manipulation Policies Mobile with Manipulation-Centric Whole-body Controllers
A Full-Stack Robotics Development Environment
Humanoid walking controller with various baseline methods
Lightweight interface for controlling ROS-based robotic arms using LeRobot
This repository shows how to classify EMG data coming from Myo Armband using neural networks and interface a 3d printed
该软件主要应用于工业上位机,类似威纶通触摸屏模式,可以随意添加配置控件来实现上位机功能 目前支持软件运行时添加控件访问PLC 并且本软件底层添加了封装好的控件可以无需代码直接与你想要的PLC进行通讯(直接在IDE拖拽出来设置好参数即可使用)
wrobot
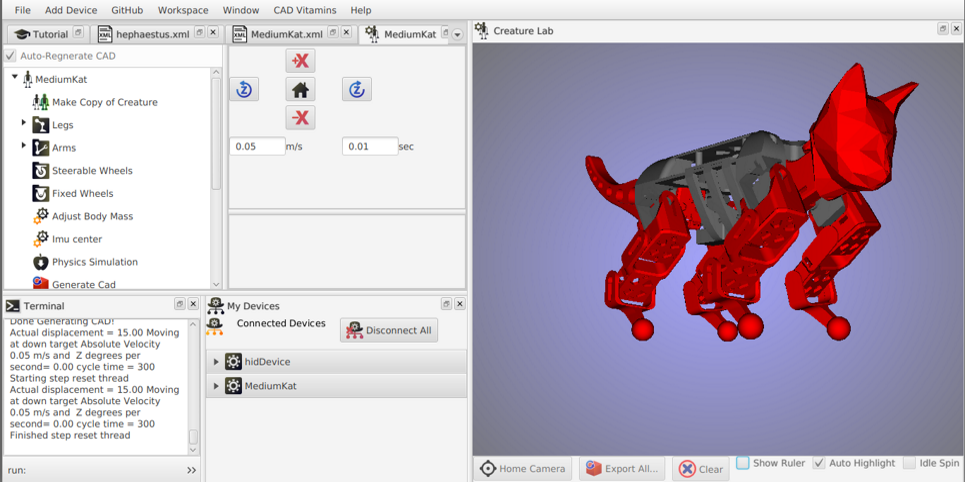
优化了原世博轮足代码和结构,使用的是vscode platformio。
[CVPR 2025 Highlight] InterMimic: Towards Universal Whole-Body Control for Physics-Based Human-Object Interactions
Fastest Robotics Runtime System. If phones have Android, robots deserve HORUS.
Official implementation of the paper: "PhysHSI: Towards a Real-World Generalizable and Natural Humanoid-Scene Interactio
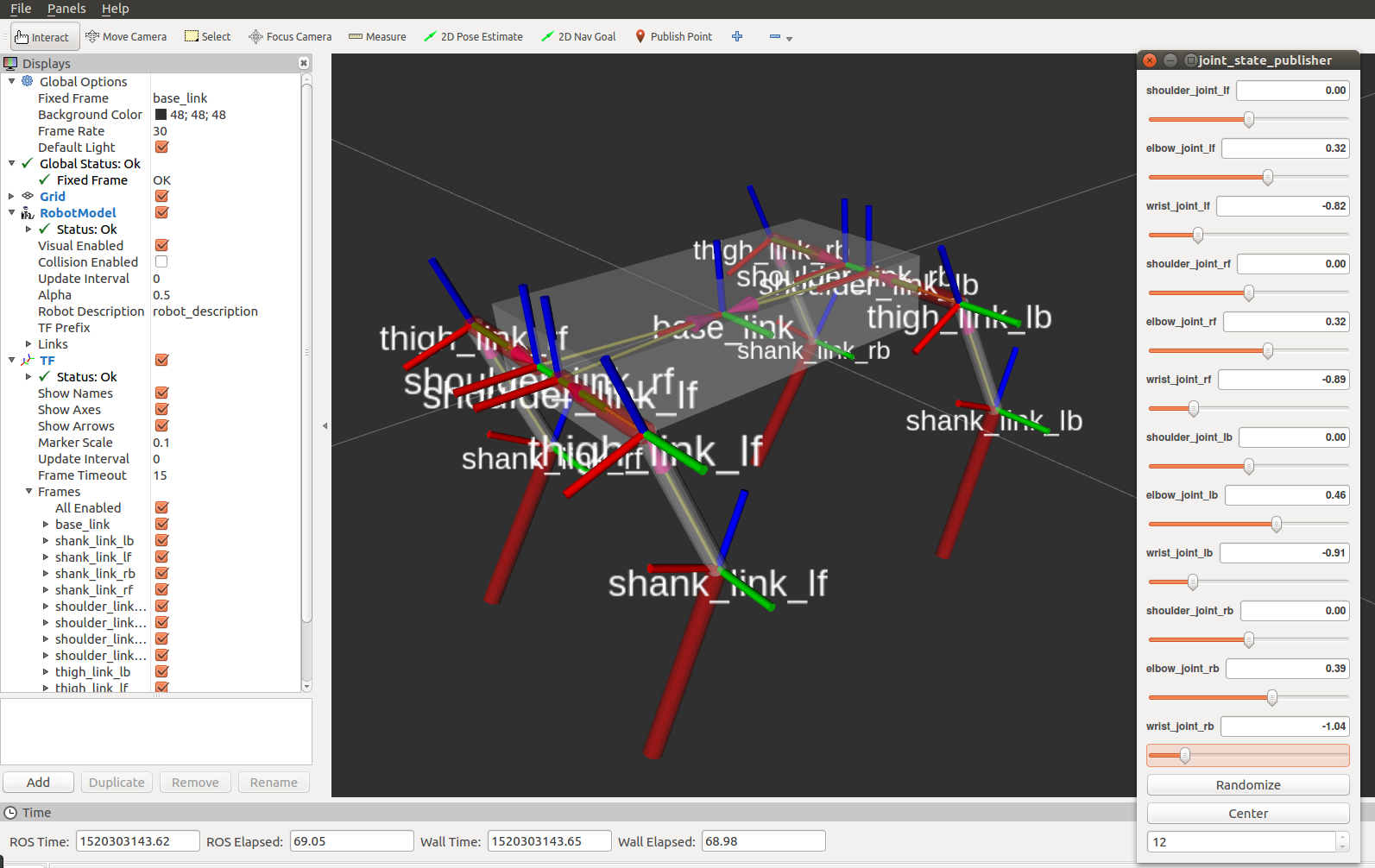
A ROS node that describes a quadruped robot using URDF
Node.js package to bypass CloudFlare's anti-bot JavaScript challenges
Official Implementation of the ICLR 2024 spotlight paper: Universal Humanoid Motion Representations for Physics-Based Co
Official Implementation of the Universal Humanoid Controller in Mujoco. Supports Kinpoly (NeurIPS 2021) and EmbodiedPose
A fast forward- and inverse kinematics solver for Arduino based on the FABRIK algorithm. The solver supports up to 4 DOF
Dorna Robotics API
Simple kinematics calculation toolkit for robotics
x-humanoid-training-toolchain
This project provides a training toolchain for adapting TienKung humanoid robots and RoboMIND dataset with the open-sour
ar4-hmi
Annin Robotics AR4 Software Library
Peabot-Library
Peabot: quadruped robot library for Raspberry Pi