neka-nat/kinpy
机器人
3/5
🧩 软硬件结合
已发布
项目简介
Simple kinematics calculation toolkit for robotics
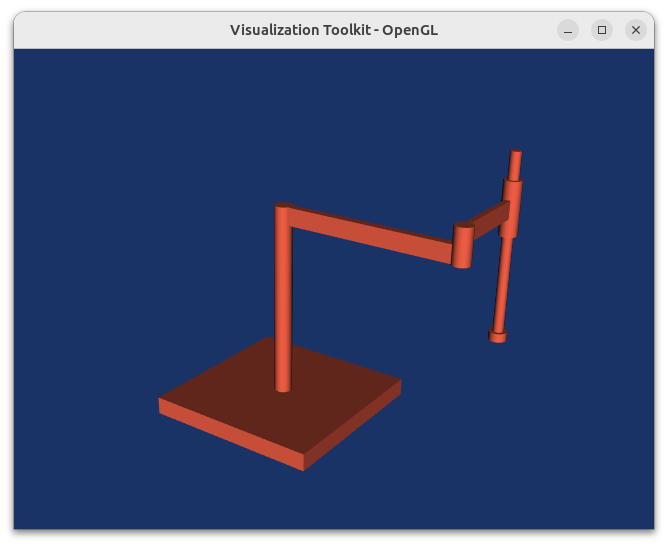
kinpy 是一个轻量级的纯 Python 运动学工具包,专注于为机器人领域的开发者提供简洁、易用的正向运动学(FK)、逆向运动学(IK)和雅可比矩阵计算能力。该项目由 neka-nat 开发并维护,以 MIT 许可证开源,在 PyPI 上已获得数万次下载,是机器人仿真与算法验证场景中非常实用的基础库。
标签
项目特点
**纯 Python 实现**:不依赖 ROS 或其他重型框架,安装简单,跨平台兼容。
**支持正向与逆向运动学**:提供 FK 和 IK 的快速计算接口,方便进行机器人运动规划。
**雅可比矩阵计算**:内置雅可比矩阵求解,可用于速度级运动学分析与控制。
**轻量级设计**:核心代码精简,适合嵌入到其他项目中,或作为教学演示工具。
**与常见机器人模型兼容**:支持从 URDF 文件加载机器人模型,直接进行运动学计算。
**MIT 开源许可**:可自由使用、修改和商用,社区友好。
技术规格
| 编程语言 | Python 3.6+ |
|---|---|
| 核心功能 | 正向运动学 (FK)、逆向运动学 (IK)、雅可比矩阵 |
| 模型输入格式 | URDF (Unified Robot Description Format) |
| 依赖库 | NumPy, PyTorch (可选) |
| 安装方式 | pip install kinpy |
| 许可证 | MIT |
| 最新版本 | 请查看 PyPI 或 GitHub Releases |
| 操作系统 | Linux, macOS, Windows |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| kinpy | 1 | — | 主 Python 包 |
| numpy | 1 | — | 必需,用于数值计算 |
| torch | 1 | — | 可选,用于 GPU 加速计算 |
| 示例脚本 (examples/) | 若干 | — | 位于 GitHub 仓库中 |
| 单元测试 (tests/) | 若干 | — | 位于 GitHub 仓库中 |
3D 模型
能力画像
**记忆与知识检索**:1/5 — 不涉及知识存储或检索功能,纯计算库。
**动手与操作**:2/5 — 需要用户编写 Python 脚本调用 API,但无硬件操作。
**编程与算法**:4/5 — 核心是运动学算法实现,用户需具备基础编程与机器人学知识。
**设计与建模**:3/5 — 用户需准备或设计 URDF 模型文件,库本身不提供建模工具。
**实验与调试**:3/5 — 提供测试用例与示例,用户可自行调试运动学计算结果。
**协作与分享**:2/5 — 开源项目,支持 Issue 和 PR,但无内置协作功能。
**学习与研究**:4/5 — 非常适合学习机器人运动学原理,代码简洁易读。
**系统集成**:3/5 — 可集成到仿真或控制系统中,但需自行编写接口代码。
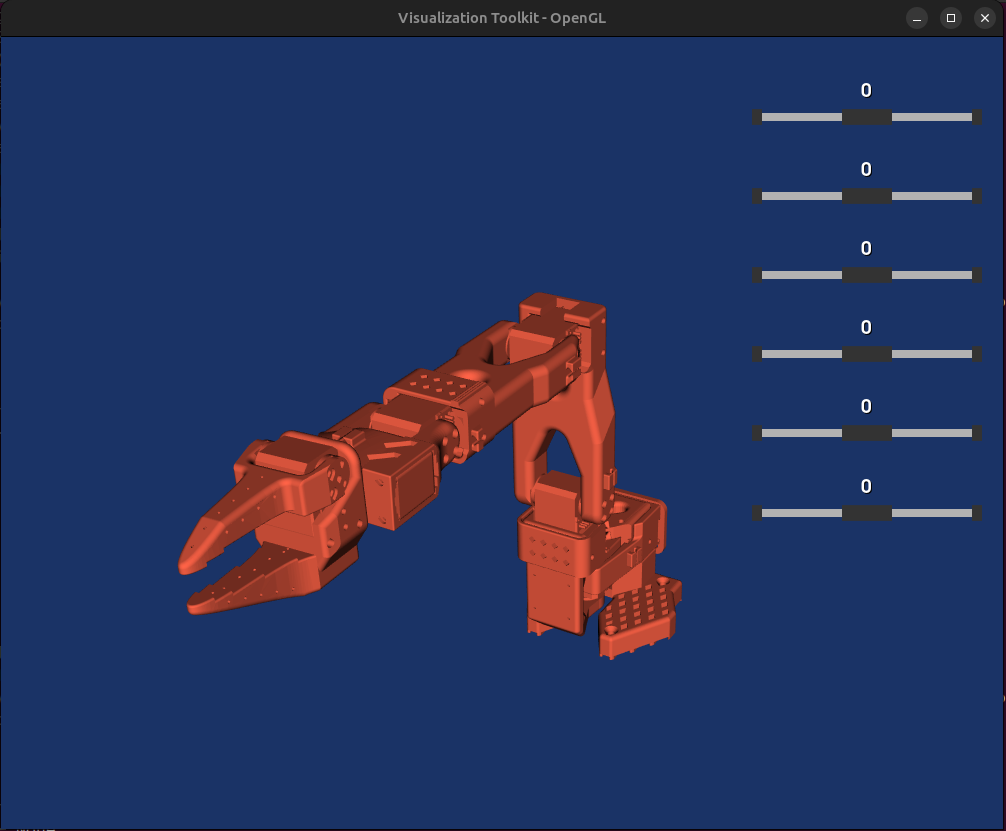
项目图库





所需技能
Python 编程基础
机器人学基础(运动学、URDF 模型)
线性代数(矩阵运算、向量空间)
使用 pip 安装 Python 包
基本的 Git 操作(可选)
适用场景
机器人运动学算法的快速原型验证
教学演示:正向/逆向运动学原理讲解
机器人仿真环境中的运动学计算模块
嵌入式或轻量级机器人控制系统的运动学求解
与深度学习框架结合,进行可微运动学计算(配合 PyTorch)
学术研究中的运动学分析与对比实验