henriksod/Fabrik2DArduino
机器人
2/5
🧩 软硬件结合
已发布
项目简介
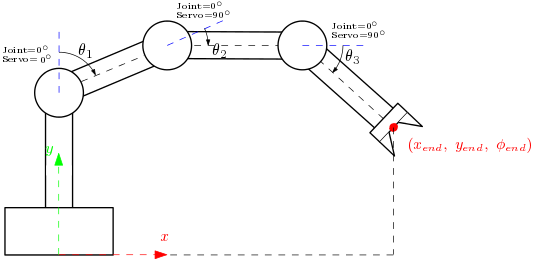
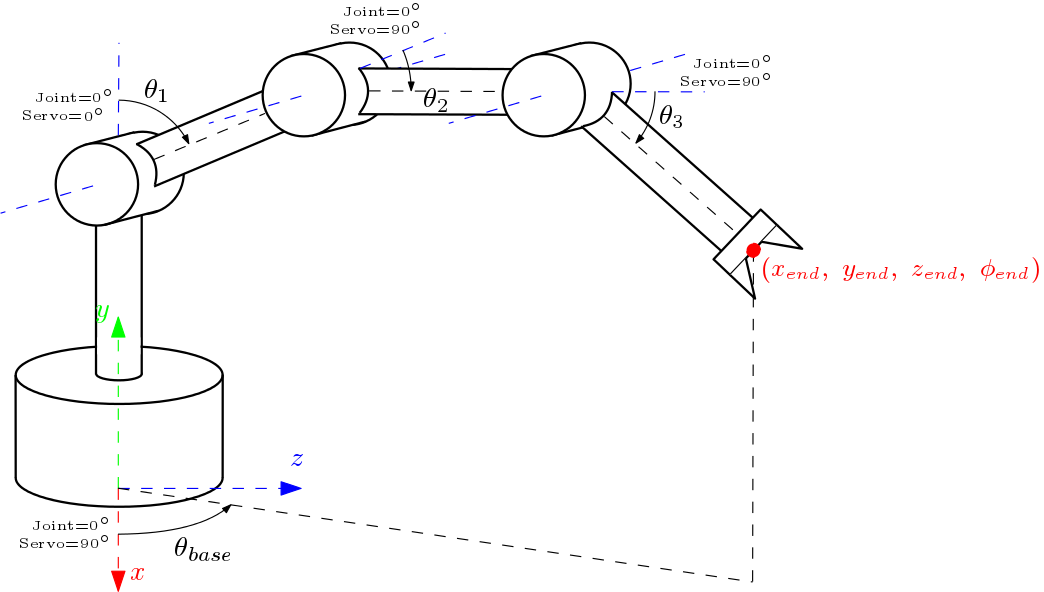
A fast forward- and inverse kinematics solver for Arduino based on the FABRIK algorithm. The solver supports up to 4 DOF
Fabrik2DArduino 是一个基于 FABRIK 算法的迭代式逆运动学求解器库,专为 Arduino 平台设计,用于快速计算机器臂各关节的角度,使末端执行器能够精确到达指定的二维或三维空间位置。该项目的核心优势在于,它既保留了迭代求解器在关节配置灵活性上的优势,又实现了接近解析解算器的运算速度,非常适合资源受限的嵌入式环境。
标签
项目特点
**基于 FABRIK 算法**:采用正向和逆向迭代逼近策略,收敛速度快,稳定性高。
**支持 2D 和 3D 空间**:可处理平面和空间中的机械臂逆运动学问题。
**轻量级设计**:代码精简,内存占用低,完美适配 Arduino 等微控制器。
**关节配置灵活**:支持任意数量的关节和连杆,无需固定结构。
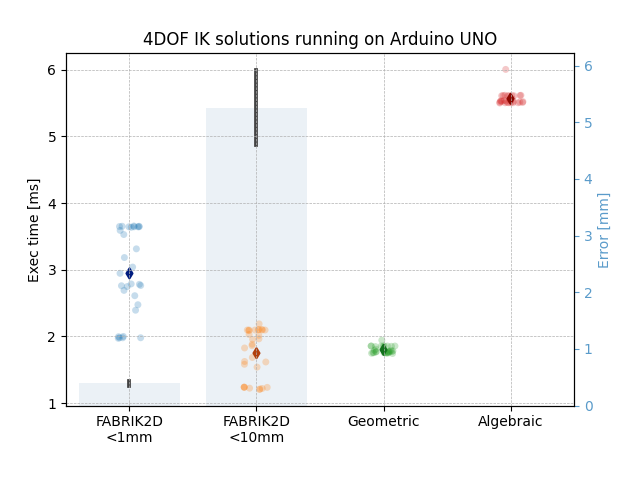
**接近解析解的速度**:迭代次数少,计算效率高,适合实时控制。
**开源且易于集成**:提供简洁的 API 接口,方便嵌入到你的机器人项目中。
技术规格
| 算法类型 | FABRIK(正向与反向迭代) |
|---|---|
| 支持维度 | 2D(平面) / 3D(空间) |
| 目标平台 | Arduino(AVR、ARM、ESP 等) |
| 编程语言 | C++(Arduino 兼容) |
| 关节数量 | 无限制(取决于内存) |
| 迭代精度 | 可配置(默认 0.01 单位) |
| 最大迭代次数 | 可配置(默认 20 次) |
| 数据类型 | float(单精度浮点) |
| 依赖库 | 无外部依赖(仅 Arduino 核心库) |
| 许可证 | 未知(需查看仓库 LICENSE 文件) |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| Arduino 开发板(如 Uno、Mega、Nano) | 1 | — | 主控板 |
| 舵机或步进电机 | 按需 | — | 驱动关节 |
| 机械臂结构件(3D 打印或金属件) | 1 套 | — | 连杆与基座 |
| 电源模块 | 1 | — | 为电机和主控供电 |
| 连接线缆 | 若干 | — | 信号与电源连接 |
| Fabrik2DArduino 库 | 1 | — | 从 GitHub 下载 |
能力画像
**记忆与知识检索**:2/5 — 需要查阅 FABRIK 算法原理和 Arduino 库文档。
**动手与操作**:4/5 — 需要组装机械臂、连接电路、调试硬件。
**编程与算法**:4/5 — 需要理解逆运动学概念,并能修改或配置 C++ 代码。
**设计与建模**:3/5 — 如果自制机械臂结构,需要 3D 建模能力。
**实验与调试**:4/5 — 需要反复调整关节参数、迭代精度和物理结构。
**协作与分享**:2/5 — 项目以个人或小团队开发为主,可 fork 仓库贡献代码。
**学习与研究**:3/5 — 适合学习机器人运动学、嵌入式算法优化。
**系统集成**:3/5 — 需要将库与电机驱动、传感器、上位机等整合。
项目图库

所需技能
基础 C/C++ 编程能力
Arduino 平台使用经验
机械臂或机器人运动学基础知识
电路连接与调试能力
3D 建模与打印(可选)
串口通信与调试工具使用
适用场景
教育机器人课程中的逆运动学教学演示
小型桌面机械臂的精确位置控制
Arduino 驱动的仿生手臂或腿式机器人
低成本自动化抓取与放置系统
创客空间中的机器人原型快速验证
嵌入式系统下的实时运动规划研究