InternRobotics/PhysHSI
机器人
3/5
🧩 软硬件结合
已发布
项目简介
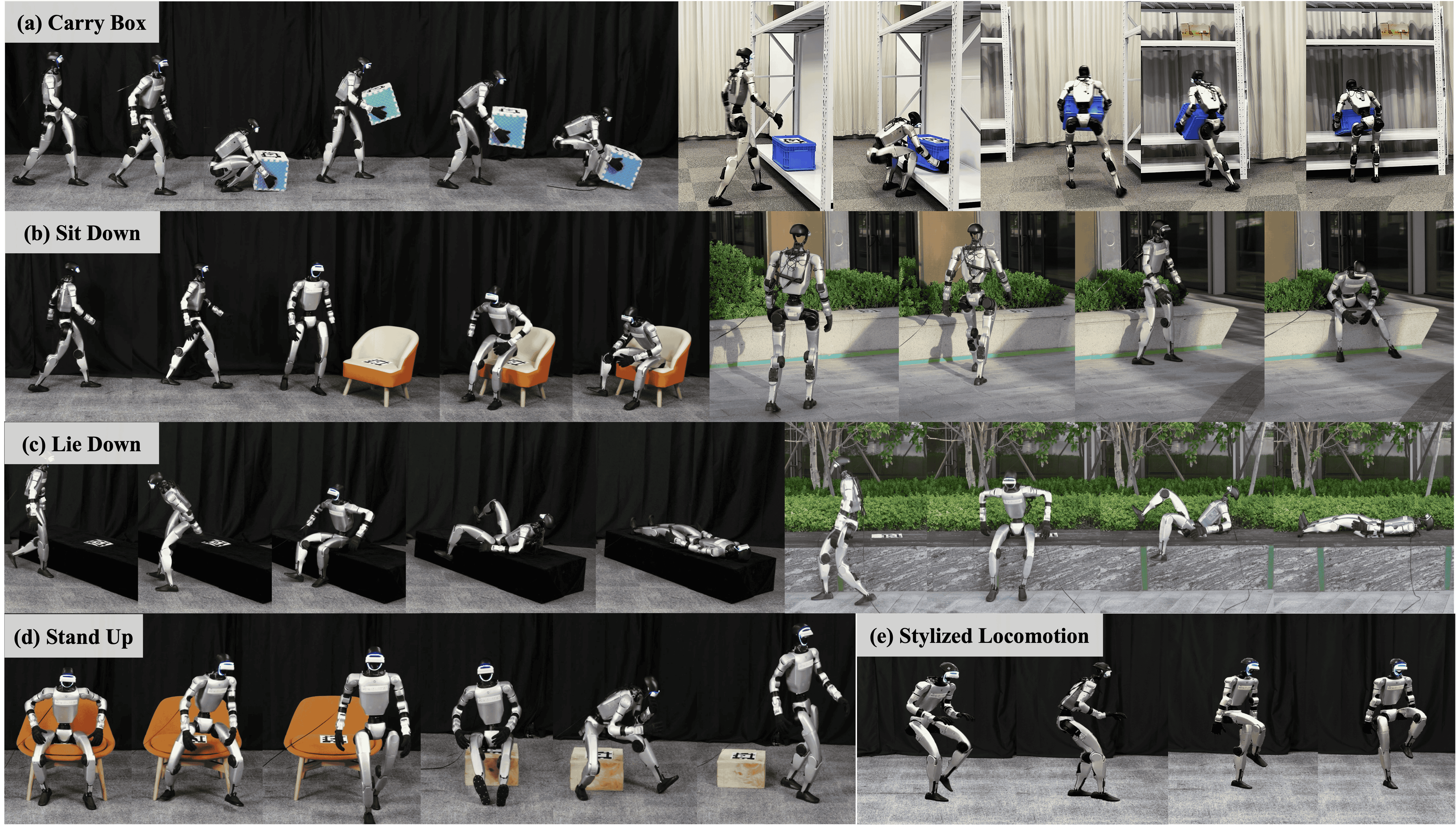
Official implementation of the paper: "PhysHSI: Towards a Real-World Generalizable and Natural Humanoid-Scene Interactio
PhysHSI是一个面向人形机器人的物理仿真与交互系统,旨在解决真实世界中类人机器人如何与场景进行自然、泛化性强的交互这一核心难题。该项目由上海人工智能实验室(InternRobotics)联合多所高校的研究者共同开发,其核心目标是通过物理仿真和强化学习,让机器人能够像人类一样完成搬运箱子、坐下、躺下、站起以及模仿特定风格的运动(如恐龙步态和高抬腿步态)等复杂任务。
标签
项目特点
**物理仿真驱动**:基于 MuJoCo 等物理引擎,提供高保真的刚体动力学仿真环境,让机器人在虚拟世界中安全试错。
**强化学习框架**:内置 PPO 等主流强化学习算法,支持从零开始训练机器人完成多种复杂交互任务。
**多样化任务库**:包含搬运、坐立、躺卧、风格化步态(恐龙步、高抬腿)等预设任务,覆盖人形机器人常见交互场景。
**可扩展架构**:模块化设计,支持自定义机器人模型、场景和奖励函数,便于研究者快速迭代新任务。
**开源社区支持**:代码完全开源,提供详细文档和示例脚本,降低入门门槛。
技术规格
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| Python 3.8+ | 1 | — | 运行环境 |
| MuJoCo 2.3.7+ | 1 | — | 物理引擎 |
| PyTorch 1.13+ | 1 | — | 深度学习框架 |
| Stable-Baselines3 | 1 | — | 强化学习库 |
| Unitree H1 URDF/MJCF | 1 | — | 默认人形机器人模型 |
| 预设任务配置文件 | 6 | — | 搬运、坐、躺、站、步态等 |
3D 模型
能力画像
**记忆与知识检索**:2/5 — 项目不涉及知识库或检索系统,主要依赖仿真环境中的状态观测。
**动手与操作**:4/5 — 核心能力在于让机器人执行物理操作任务,如搬运、坐立等,强调与环境的交互。
**编程与算法**:4/5 — 需要编写强化学习训练脚本、自定义奖励函数和任务逻辑,对 Python 和算法理解要求较高。
**设计与建模**:3/5 — 支持自定义机器人模型和场景,但主要使用现有模型,建模工作量中等。
**实验与调试**:4/5 — 训练过程需要大量实验调参,包括奖励设计、超参数优化和仿真参数调整。
**协作与分享**:3/5 — 开源项目,可通过 GitHub 提交 Issue 和 PR,但社区规模较小。
**学习与研究**:5/5 — 非常适合人形机器人、强化学习和物理仿真方向的研究与学习。
**系统集成**:3/5 — 可与其他机器人控制框架集成,但需要一定的系统适配工作。
项目图库



视频
所需技能
Python 编程基础
强化学习基础知识(PPO 算法)
机器人运动学与动力学基础
Linux 命令行操作
Git 版本控制
基本的数据可视化(TensorBoard)
适用场景
高校机器人实验室的人形机器人运动控制研究
强化学习算法的教学与实验课程
人形机器人交互任务的快速原型验证
物理仿真与真实机器人之间的 Sim-to-Real 迁移研究
机器人步态风格化与运动模仿的学术探索