curieuxjy/Awesome_Quadrupedal_Robots
Awesome Quadrupedal Robots
cybergalactic/PythonVehicleSimulator
The Python Vehicle Simulator is software that supplements the textbook "Handbook of Marine Craft Hydrodynamics and Motio
silvery107/rl-mpc-locomotion
Deep RL for MPC control of Quadruped Robot Locomotion
Schildkroet/GRBL-Advanced
Grbl-Advanced is a no-compromise, high performance, low cost alternative for CNC milling. This version of Grbl runs on a
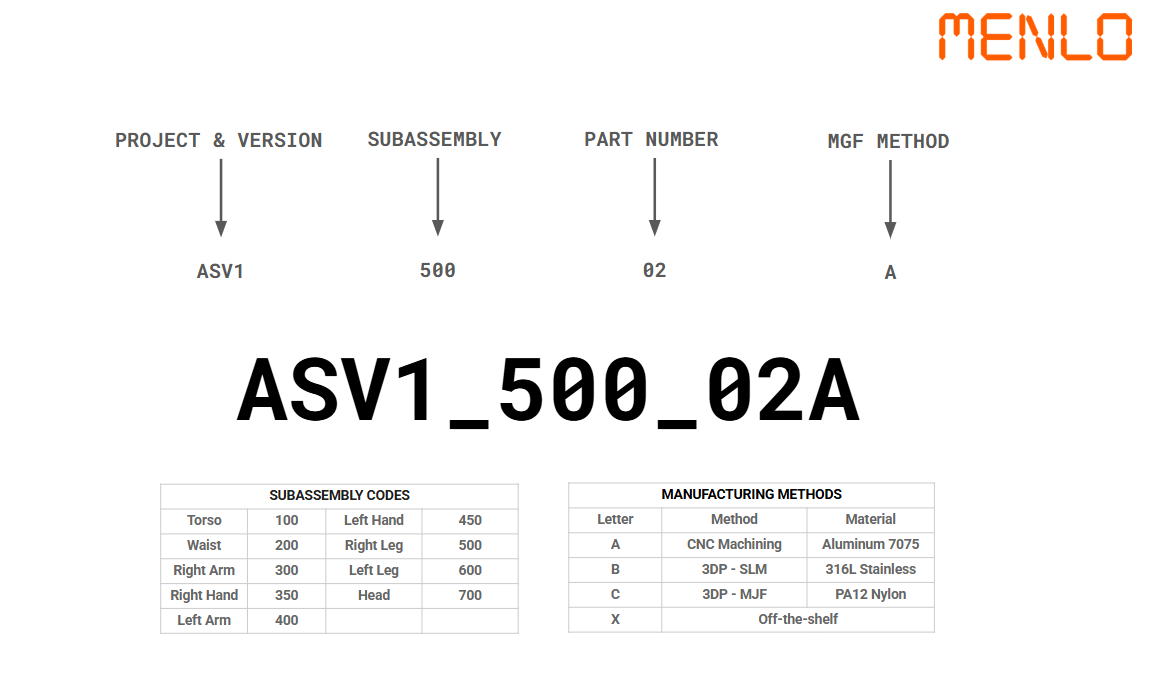
asimovinc/asimov-v0
v0 of Asimov, an open-source humanoid robot
Salman-H/pick-place-robot
Object picking and stowing with a 6-DOF KUKA Robot using ROS
LMD0311/Awesome-World-Model
Collect some World Models for Autonomous Driving (and Robotic, etc.) papers.
chvmp/robots
Collection of quadrupedal robots configured to work in CHAMP development framework
Interbotix/interbotix_ros_core
Core ROS Packages for Interbotix Robots
galliot-us/neuralet
Neuralet is an open-source platform for edge deep learning models on edge TPU, Jetson Nano, and more.
HansZ8/RoboJuDo
A plug-and-play deploy framework for robots. Just deploy, just do.
MeArm/MeArm
Laser cut files for MeArm
ayonga/frost-dev
Fast Robot Optimization and Simulation Toolkit (FROST)
isaac_so_arm101
Isaac Lab外部项目,用于SO-ARM100/101机械臂。
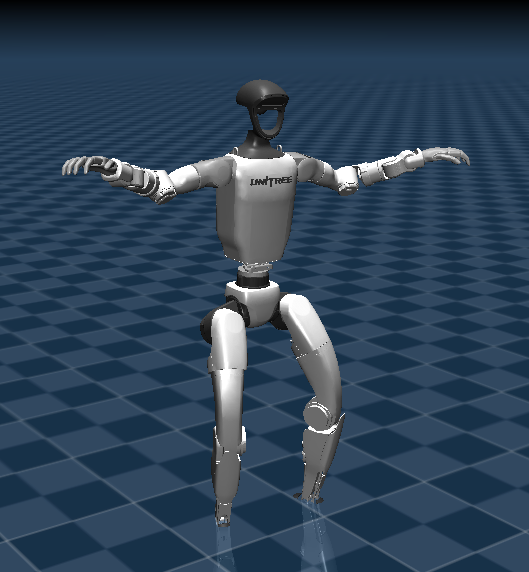
manumerous/wb_humanoid_mpc
Whole-Body Nonlinear MPC for Realtime Humanoid Loco-Manipulation Planning and Control
hongsukchoi/VideoMimic
Visual Imitation Enables Contextual Humanoid Control. CoRL 2025, Best Student Paper Award.
ROBOTIS-GIT/ROBOTIS-OP3
ROS packages for the ROBOTIS OP3
sirjonasxx/G-Earth
Cross-platform Habbo packet manipulator
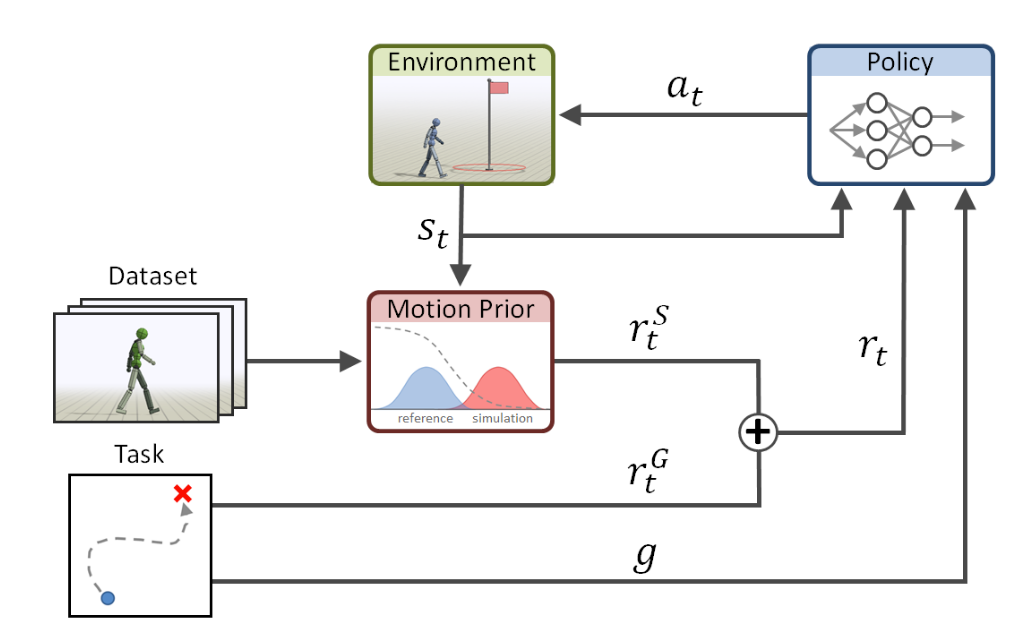
Skylark0924/Rofunc
🤖 The Full Process Python Package for Robot Learning from Demonstration and Robot Manipulation
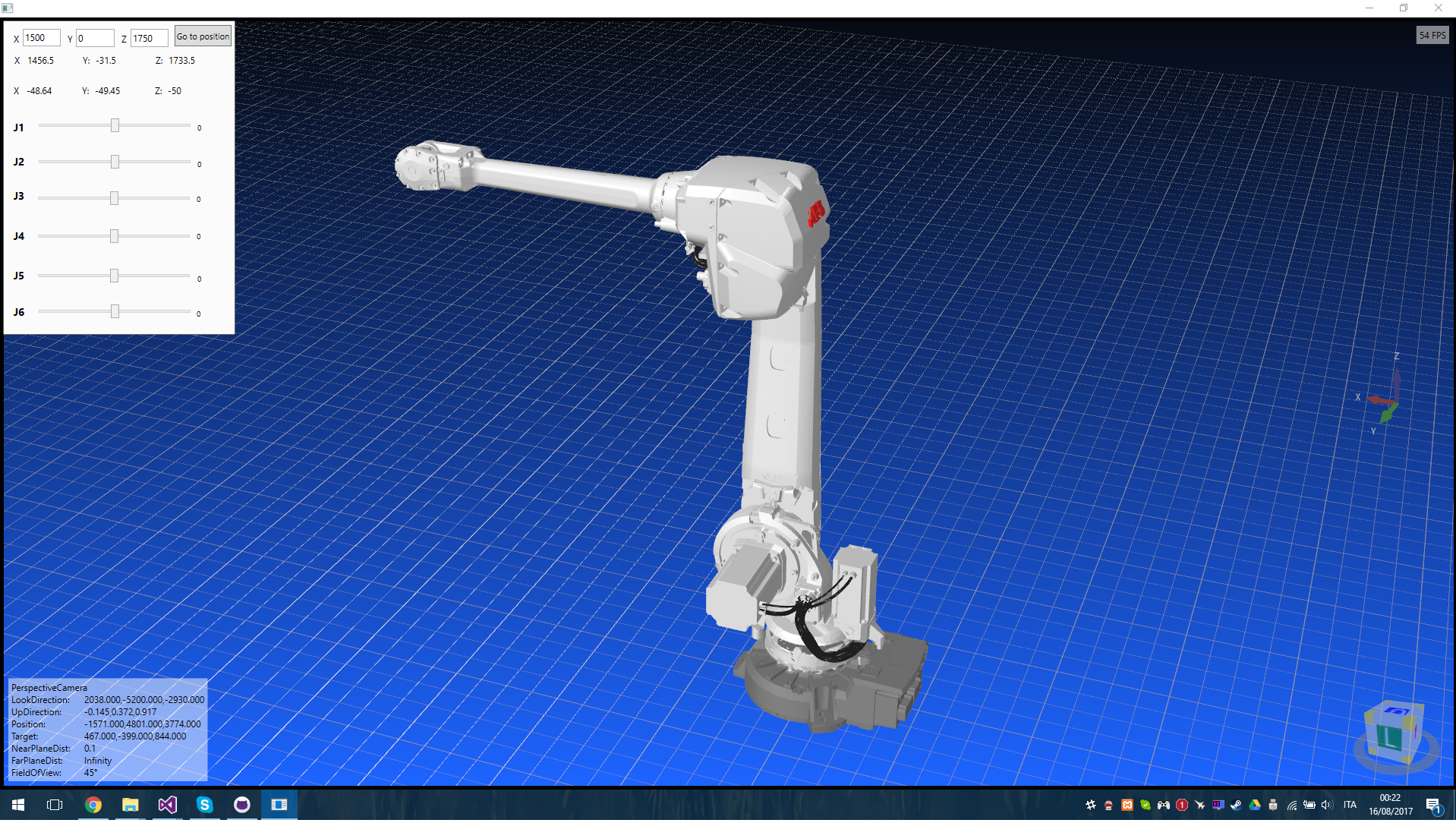
Gabryxx7/RobotArmHelix
3D Simulation, forward and inverse kinematics of a robotic arm in C# using WPF and helix-toolkit