待补充
Interbotix/interbotix_ros_core
机器人
4/5
🧩 软硬件结合
已发布
项目简介
Core ROS Packages for Interbotix Robots
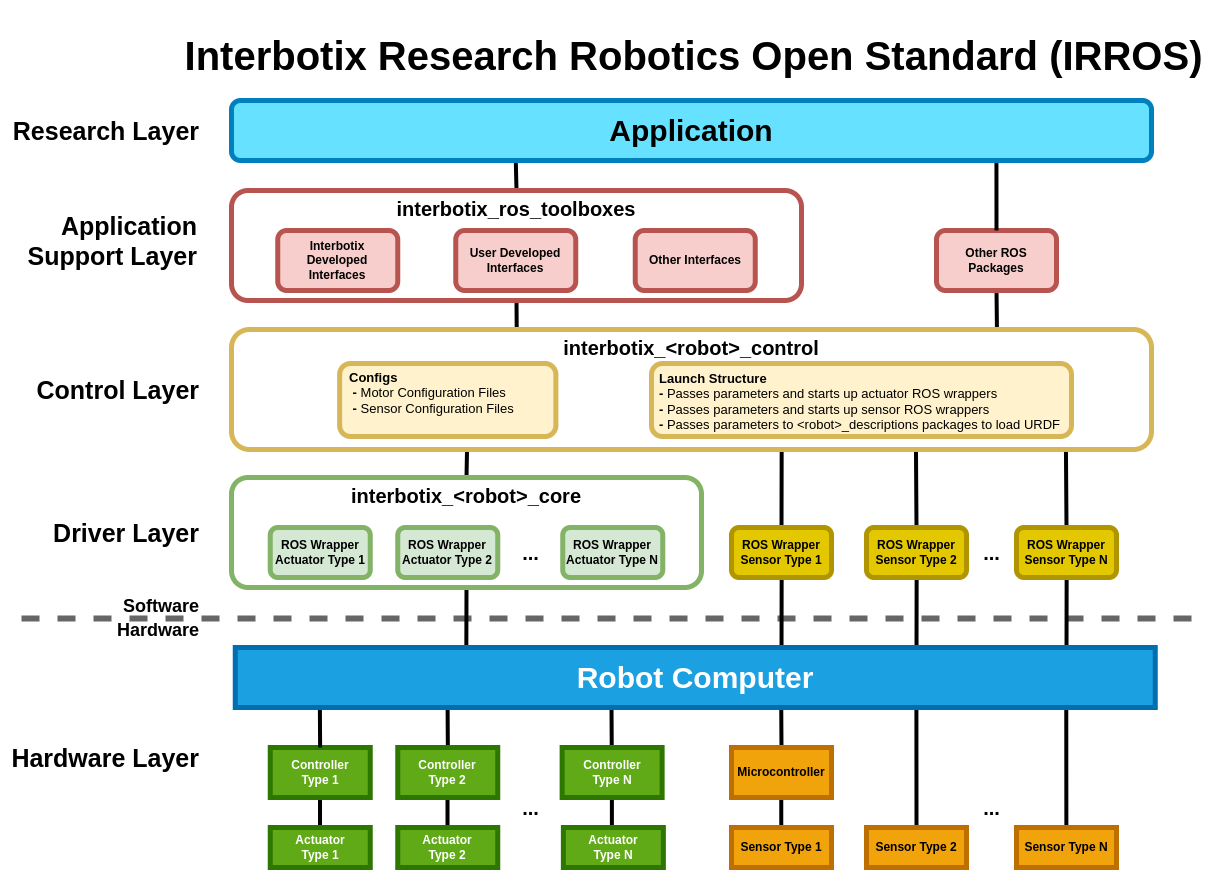
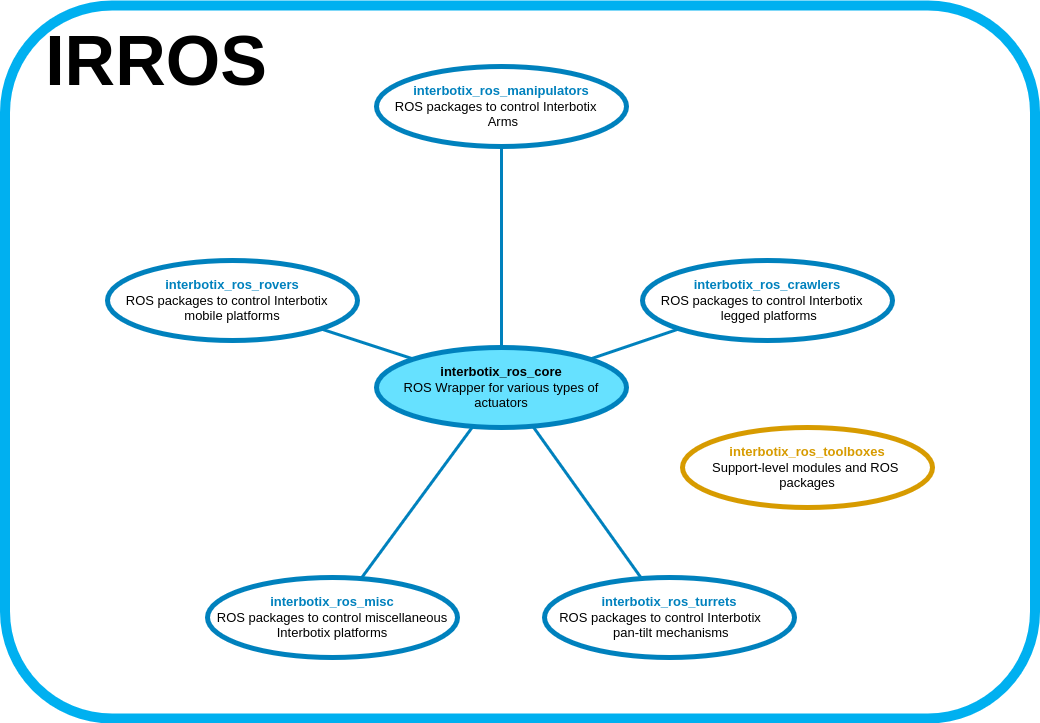
Interbotix/interbotix_ros_core 是 Interbotix 机器人生态系统的核心基础库,专为简化机器人开发中的底层硬件控制而设计。该项目围绕 Interbotix 公司使用的各类执行器(如 Dynamixel 伺服电机、舵机等)构建了统一的 ROS 封装层,提供了从硬件到 ROS 接口的标准化桥梁。其核心功能在于将复杂的串口通信、寄存器配置等底层“管道”代码完全抽象化,让开发者无需关心物理硬件的细节,即可通过标准的 ROS 话题、服务和参数直接控制电机、读取传感器数据。项目采用模块化架构,按执行器类型划分独立 ROS 包,每个包都包含低层非 ROS 依赖、低层 ROS 包和最终的 ROS 驱动封装,这种分层设计保证了代码的高内聚与低耦合。技术栈上,它同时支持 ROS 1 Noetic 和 ROS 2 Galactic、Humble、Rolling 等多个发行版,并通过 CI 持续验证兼容性。项目解决了机器人开发中常见的硬件适配碎片化问题——开发者无需为不同执行器编写不同驱动,只需调用统一的 ROS 接口即可。它特别适用于构建多自由度机械臂、云台、六足机器人、移动底盘等复合型机器人系统,是 Interbotix 整个机器人产品线(包括 manipulators、turrets、rovers、crawlers 等上层仓库)的基石。对于希望快速搭建机器人原型、专注于上层算法而非底层硬件调试的 ROS 研究人员和工程师来说,这个项目提供了开箱即用的标准化控制能力。
标签
项目特点
**硬件抽象化**:将复杂的串口通信、寄存器配置等底层代码完全封装,开发者通过 ROS 标准接口即可控制硬件。
**模块化架构**:按执行器类型(如 Dynamixel、舵机等)拆分为独立 ROS 包,每个包包含底层驱动和 ROS 封装层。
**统一 ROS 接口**:所有硬件都通过统一的 ROS 话题、服务和参数进行交互,降低学习成本。
**跨平台兼容**:基于 ROS 框架,可在 Ubuntu、ROS Melodic/Noetic 等主流环境下运行。
**即插即用**:配合 Interbotix 硬件,开箱即用,无需额外配置底层驱动。
**社区活跃**:GitHub 星数 288,有持续更新和维护记录。
技术规格
| 支持 ROS 版本 | ROS Melodic (Ubuntu 18.04)、ROS Noetic (Ubuntu 20.04) |
|---|---|
| 支持硬件 | Interbotix 系列执行器(Dynamixel 伺服电机、舵机等) |
| 编程语言 | C++、Python |
| 通信协议 | ROS 话题、服务、参数服务器 |
| 底层接口 | 串口(UART)、USB 转串口 |
| 依赖库 | roscpp、rospy、std_msgs、sensor_msgs、geometry_msgs |
| 架构类型 | 模块化 ROS 包集合 |
| 许可证 | 待确认(README 未明确标注) |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| Interbotix 机器人平台 | 1 | — | 需配合 Interbotix 系列硬件使用 |
| Dynamixel 伺服电机 | 若干 | — | 根据具体机器人型号配置 |
| USB 转串口适配器 | 1 | — | 用于连接电机与控制电脑 |
| Ubuntu 18.04/20.04 | 1 | — | 操作系统 |
| ROS Melodic/Noetic | 1 | — | 机器人操作系统 |
| Python 2.7/3.x | 1 | — | 脚本语言支持 |
| C++ 编译器 | 1 | — | 编译 C++ 节点 |
能力画像
**记忆与知识检索**:2/5 — 项目本身不涉及知识库或检索功能,但依赖 ROS 文档和硬件手册。
**动手与操作**:4/5 — 需要连接硬件、配置串口、运行 ROS 节点,动手操作要求较高。
**编程与算法**:3/5 — 主要使用 C++/Python 编写 ROS 节点,但核心算法已封装,用户只需调用接口。
**设计与建模**:1/5 — 不涉及机械设计或 3D 建模,专注于软件封装。
**实验与调试**:4/5 — 需要调试串口通信、电机参数、ROS 话题/服务,实验性较强。
**协作与分享**:3/5 — 基于 GitHub 开源,可提交 Issue、PR,适合团队协作。
**学习与研究**:3/5 — 适合学习 ROS 硬件封装、串口通信原理,但文档以英文为主。
**系统集成**:4/5 — 作为核心库,可集成到更复杂的机器人系统中,如导航、机械臂控制。
项目图库





所需技能
熟悉 ROS 基本概念(节点、话题、服务、参数)
掌握 C++ 或 Python 编程基础
了解串口通信原理(UART、波特率等)
能够使用 Linux 命令行(Ubuntu)
具备基本的 Git 版本控制操作能力
了解 Dynamixel 伺服电机基本参数(可选)
适用场景
基于 Interbotix 硬件的机器人开发与原型验证
教育场景中的机器人控制教学(如 ROS 入门、电机控制实验)
科研项目中需要快速搭建机器人底层控制框架
工业场景中的机械臂或移动机器人底层驱动开发
对 Dynamixel 等伺服电机进行 ROS 封装与二次开发
机器人竞赛中需要快速集成硬件与 ROS 系统