待补充
silvery107/rl-mpc-locomotion
机器人
3/5
🧩 软硬件结合
已发布
项目简介
Deep RL for MPC control of Quadruped Robot Locomotion
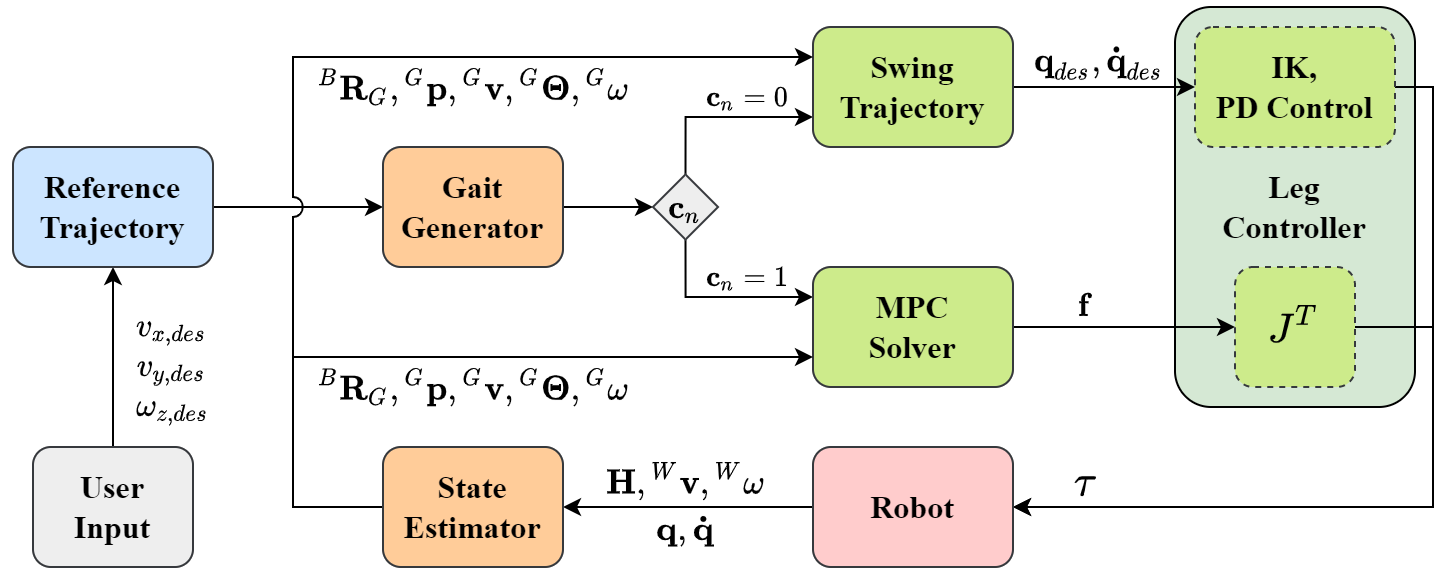
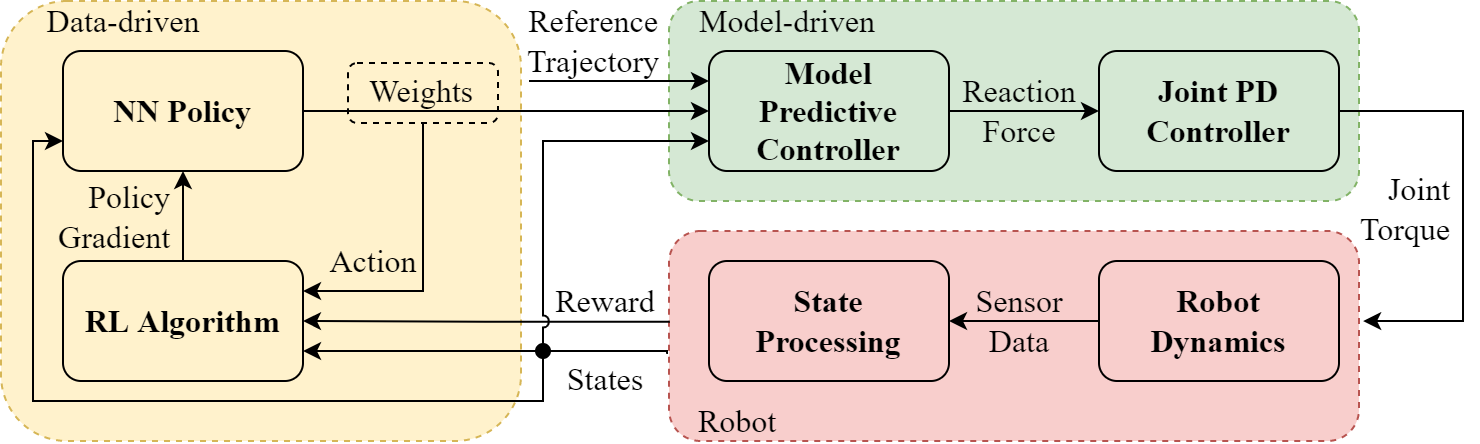
RL-MPC-Locomotion 是一个面向四足机器人运动控制的强化学习与模型预测控制(MPC)融合框架。该项目核心解决的是传统 MPC 控制器参数依赖人工调优、难以适应复杂地形和动态变化的问题。它通过一个上层策略网络(Policy Network)动态预测下层 MPC 控制器的权重参数,实现了从“固定规则”到“自适应学习”的跨越。
标签
项目特点
**自适应参数调节**:上层策略网络根据当前状态实时预测MPC控制器的权重参数,无需人工反复调参
**强化学习+MPC融合**:结合了强化学习的决策能力和MPC的精确控制能力,兼顾鲁棒性和性能
**复杂地形适应**:在崎岖地形、斜坡、台阶等复杂场景下表现出色,能动态调整步态和姿态
**仿真到现实迁移**:支持在仿真环境中训练后直接迁移到真实四足机器人上运行
**模块化设计**:策略网络和MPC控制器解耦,便于替换不同型号的机器人模型或控制算法
技术规格
| 机器人平台 | Unitree A1 / Aliengo 四足机器人 |
|---|---|
| 控制频率 | 400 Hz(MPC层) |
| 策略网络架构 | 多层感知机(MLP),隐藏层维度 [256, 256, 128] |
| 状态输入维度 | 36维(包含关节角度、角速度、机身姿态、足端接触状态等) |
| 动作输出维度 | 12维(对应MPC权重参数) |
| 训练框架 | PyTorch + Isaac Gym |
| MPC求解器 | OSQP(二次规划求解器) |
| 仿真环境 | NVIDIA Isaac Gym |
| 训练步数 | 约1亿步(含地形随机化) |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| Unitree A1 四足机器人 | 1 | — | 或 Aliengo |
| NVIDIA Jetson Xavier NX | 1 | — | 用于机载推理 |
| IMU(BMI088) | 1 | — | 机身姿态测量 |
| 关节编码器 | 12 | — | 每个关节一个 |
| Wi-Fi 模块 | 1 | — | 与上位机通信 |
| 24V 锂电池 | 1 | — | 机器人供电 |
3D 模型
能力画像
**记忆与知识检索**:3/5 — 项目文档和论文提供了完整的算法原理和训练配置,但缺少详细的API文档
**动手与操作**:4/5 — 需要组装和调试四足机器人硬件,但主要工作集中在软件和算法层面
**编程与算法**:5/5 — 核心是强化学习算法和MPC控制器的实现,需要扎实的Python和PyTorch编程能力
**设计与建模**:3/5 — 机器人模型文件已提供,但需要理解动力学建模和MPC约束设计
**实验与调试**:4/5 — 需要大量仿真实验和真机调试,包括地形随机化、参数调优等
**协作与分享**:2/5 — 项目为个人维护,社区贡献较少,协作机制不完善
**学习与研究**:5/5 — 涉及强化学习、模型预测控制、机器人学等多个前沿领域,研究价值高
**系统集成**:4/5 — 需要将策略网络、MPC求解器、机器人驱动、仿真环境等多个模块集成
项目图库






所需技能
Python 编程(熟练)
PyTorch 深度学习框架
强化学习基础(PPO、策略梯度等)
模型预测控制(MPC)原理
四足机器人运动学与动力学
Linux 系统操作
Isaac Gym 仿真环境使用
基本机器人硬件调试能力
适用场景
四足机器人在非结构化地形(碎石、草地、楼梯)上的自主行走
强化学习与模型预测控制融合算法的学术研究
机器人控制算法的快速原型验证
高校机器人实验室的教学与实验项目
工业巡检机器人的运动控制方案开发
机器人竞赛中的自适应步态控制