待补充
Gabryxx7/RobotArmHelix
机器人
3/5
🧩 软硬件结合
已发布
项目简介
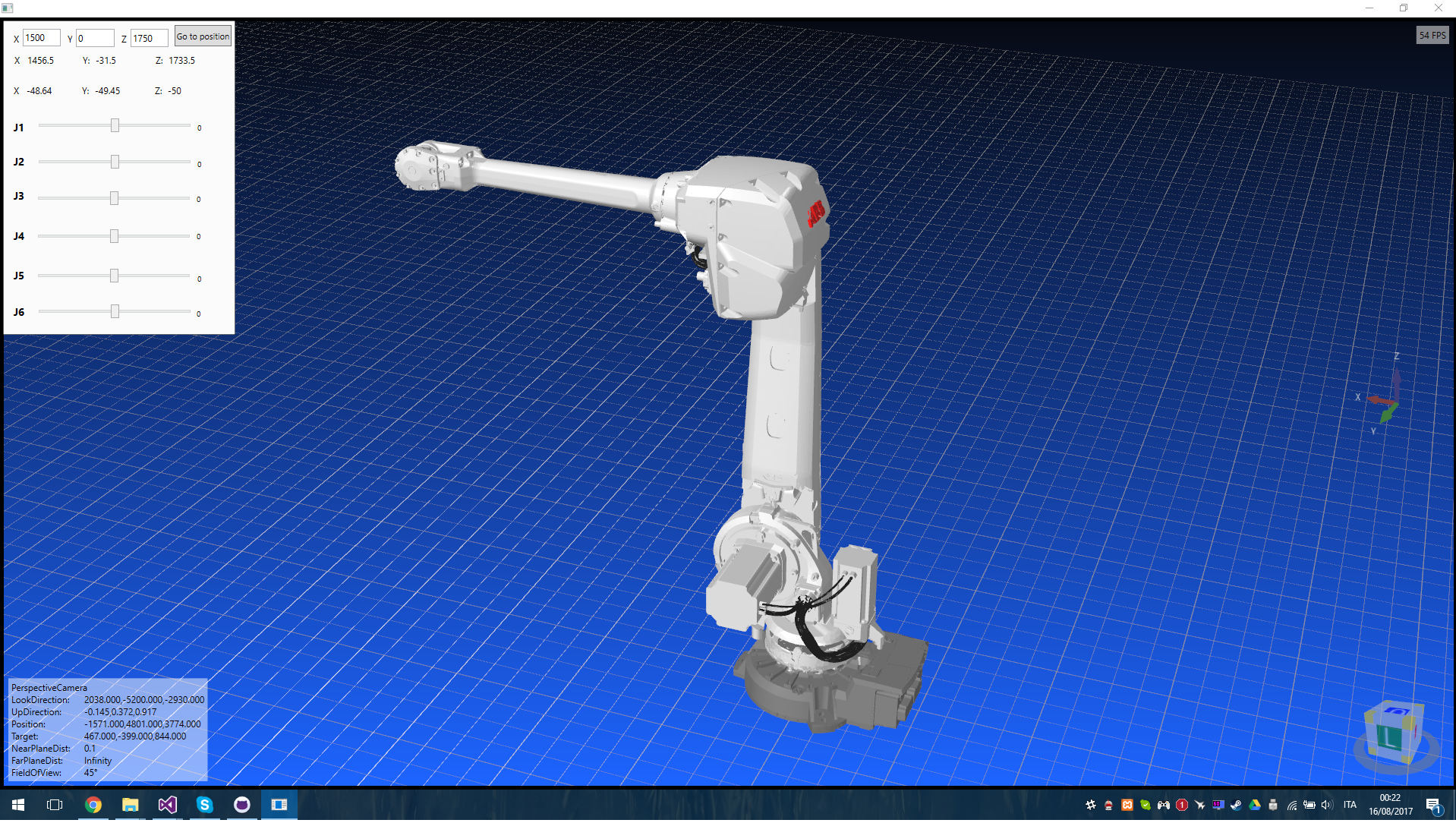
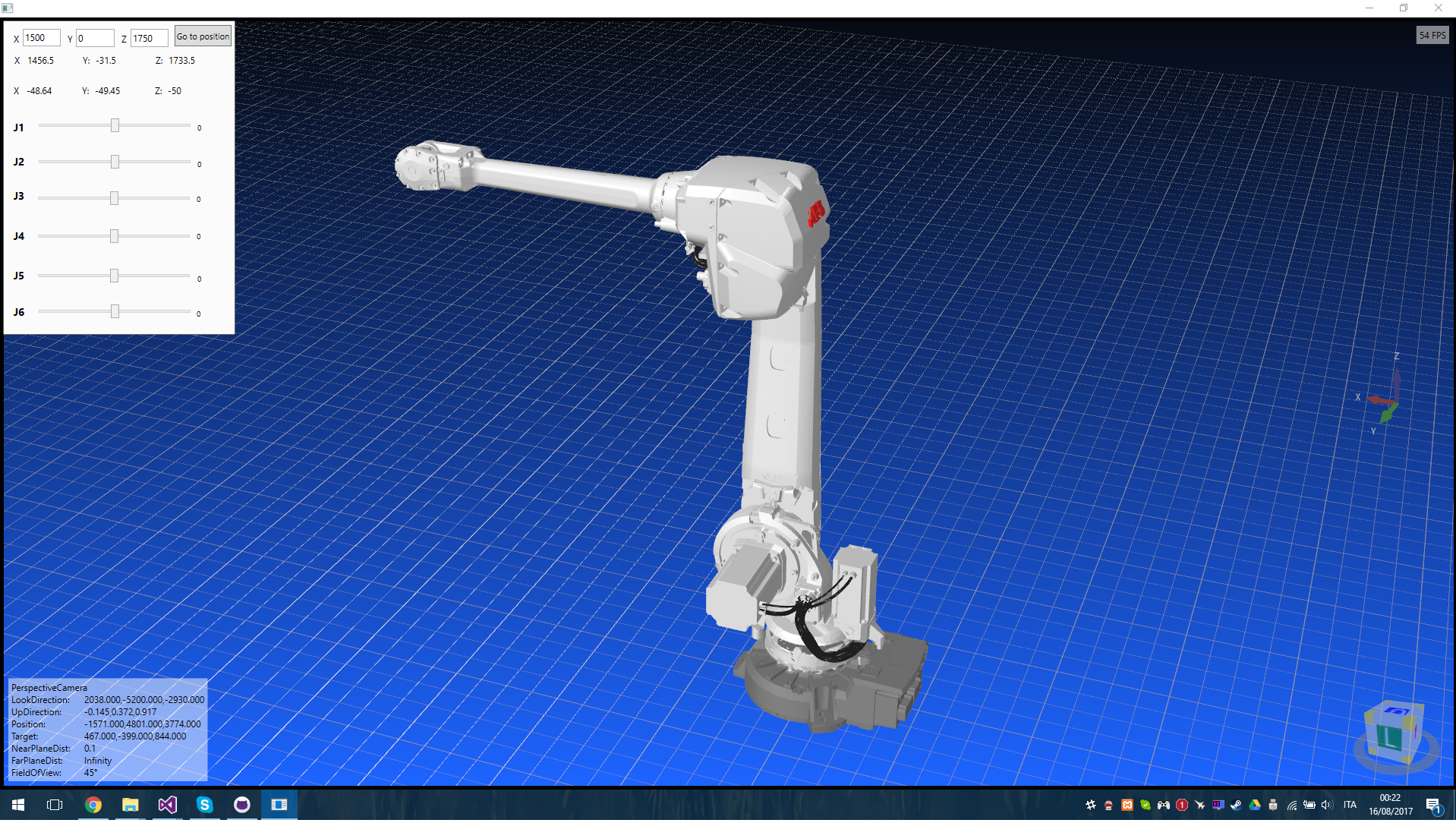
3D Simulation, forward and inverse kinematics of a robotic arm in C# using WPF and helix-toolkit
这是一个基于C#和WPF框架开发的开源机器人手臂3D仿真项目,核心功能是实现机械臂的正向运动学与逆向运动学模拟。项目利用Helix-Toolkit这一强大的3D图形库,在Windows桌面环境中构建了完整的可视化交互界面。技术栈方面,主要采用C#作为编程语言,WPF负责UI界面设计,Helix-Toolkit提供3D渲染支持,同时结合了梯度下降算法来实现逆向运动学求解。项目解决了工业机器人仿真中常见的运动学计算与可视化问题,特别适合用于机器人算法验证、教学演示和工业自动化方案预研。其核心特点包括:基于ABB IRB 4600真实工业机器人模型,通过FreeCAD将STEP格式转换为STL网格,并利用MeshLab的二次边折叠简化算法将模型面数优化至10000面,在保证视觉真实感的同时大幅提升了渲染性能。逆向运动学部分采用了Alan Zucconi提出的梯度下降方法,能够通过迭代计算快速找到关节角度解。项目还参考了RAV2项目的架构设计,确保了代码的模块化和可扩展性。适用场景非常广泛,包括机器人学课程教学、工业机器人离线编程验证、运动学算法对比测试,以及作为更复杂机器人仿真系统的底层基础。用户可以通过鼠标交互控制机械臂末端执行器的目标位置,实时观察各关节角度的变化和机械臂姿态的调整,直观理解运动学原理。
标签
项目特点
基于ABB IRB 4600真实工业机器人模型,仿真更贴近实际
支持正向运动学与逆向运动学模拟,采用梯度下降算法求解
利用Helix-Toolkit实现高质量3D图形渲染与交互
通过FreeCAD将STEP格式转换为STL网格,模型处理流程完整
基于C#和WPF开发,Windows桌面环境友好,易于扩展
技术规格
| 编程语言 | |
|---|---|
| UI框架 | |
| 3D图形库 | |
| 机器人模型 | |
| 模型格式 | |
| 逆向运动学算法 | |
| 开发环境 | |
| 许可证 |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| .NET Framework | 1 | — | 运行环境 |
| Helix-Toolkit | 1 | — | 3D渲染库 |
| FreeCAD | 1 | — | 模型格式转换工具 |
| ABB IRB 4600 STL网格 | 1 | — | 由STEP转换而来 |
| C#项目源码 | 1 | — | 包含WPF界面与算法实现 |
3D 模型
能力画像
**记忆与知识检索**:2/5 — 项目本身不涉及知识库或检索功能,依赖开发者对机器人运动学的理解
**动手与操作**:3/5 — 需要配置开发环境、转换模型文件,但整体操作流程较为标准化
**编程与算法**:5/5 — 核心涉及C#编程、WPF界面开发、梯度下降算法实现,编程要求高
**设计与建模**:3/5 — 使用FreeCAD进行模型格式转换,但不涉及原始3D建模
**实验与调试**:4/5 — 运动学算法需要反复调试参数,3D可视化便于验证结果
**协作与分享**:2/5 — 开源项目,但协作文档和社区互动较少
**学习与研究**:5/5 — 非常适合学习机器人运动学、梯度下降算法和WPF 3D开发
**系统集成**:3/5 — 可集成到工业自动化方案预研中,但需额外开发接口
项目图库
所需技能
C#编程基础
WPF桌面应用开发
机器人运动学(正向与逆向)理论基础
梯度下降算法理解
3D图形学基础(Helix-Toolkit使用)
FreeCAD基本操作(模型格式转换)
Git版本控制
适用场景
机器人算法验证与原型开发
高校机器人课程教学演示
工业自动化方案预研与可行性分析
机械臂运动学学习与研究
3D仿真可视化项目开发参考
工业机器人离线编程与路径规划测试