搜索 "os" 找到 345 个结果
Netryx 是本地化地理定位工具,用计算机视觉识别精确位置。
ExoMy - The 3D Printed Rover - Successor repository
This project shows how to build a 360° radar system using ESP32, a stepper motor, and an ultrasonic sensor. It includes
使用ESP32/8266、继电器和干簧管实现车库门位置控制。
ROS系统控制RoboSub竞赛机器人。
Tracking系统支持实时GPS追踪与位置数据管理。
DumBot13开源3D打印人形机器人,21/23DOF,成本¥18,000内。
heroswarmv2 开源代码与硬件设计,来自 He 实验室。
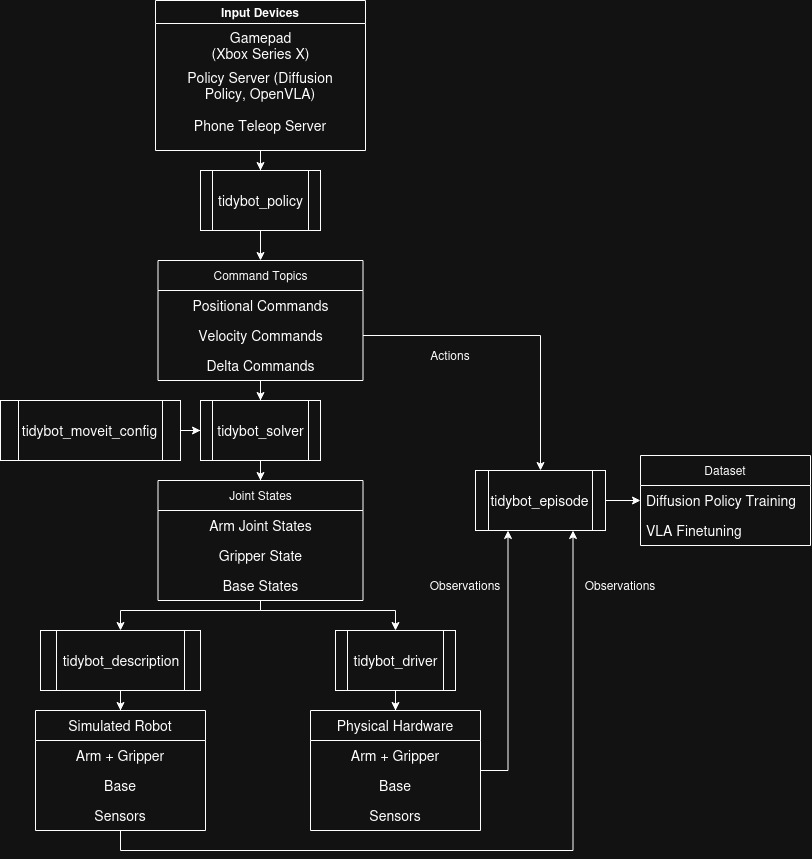
ROS 2 interface and imitation learning pipeline for the Tidybot++ mobile manipulator
iOS应用,自动化VEX Robotics Competition的侦察流程。
Water level monitor using open-source microcontrollers (Arduino, ESP8266, ESP32) and ultrasonic sensors HC-SR04 / JSN-SR
ESP32Cam - PIR-triggered photos uploaded to webserver. Motion broadcast via MQTT. Video streaming. Settings stored in SP
Pixel-Pets: A local, open-source virtual pet ecosystem on M5Stack. 100% AI-authored C++ (Claude) by a 10yo maker. Includ
四轮机器人通过树莓派连接ROS,Arduino控制L298N电机驱动。
Peabot: quadruped robot library for Raspberry Pi
开源低成本四足腿设计,采用BLDC执行器。
4声部复音合成器,3振荡器/声部+滤波器+LFO+EG。
低成本开源3D打印机器人平台,用于学习ROS 2,支持真实硬件与仿真。
模块化开源飞控固件。
MATE ROV开发的单一仓库。