足球比赛机器人
soccer-match-robot
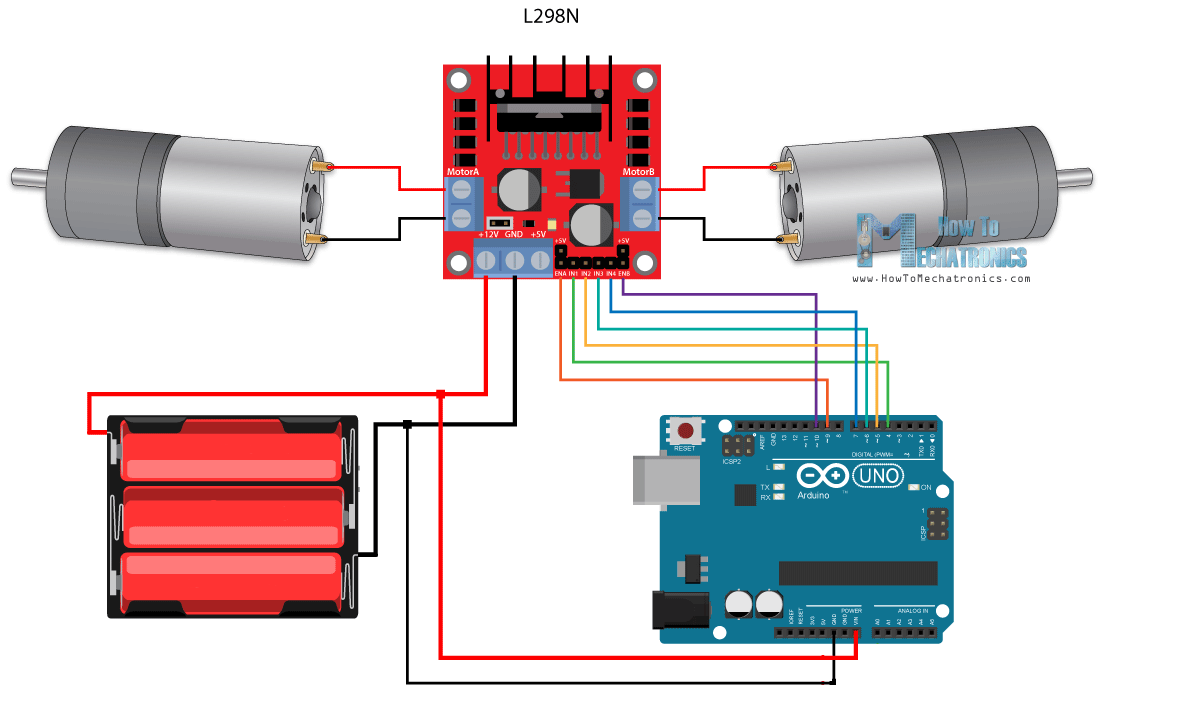
机器人电机驱动板、舵机驱动板
3/5
🧩 软硬件结合
已发布
项目简介
四轮机器人通过树莓派连接ROS,Arduino控制L298N电机驱动。
这是一个基于ROS Melodic的四轮足球机器人开源项目,旨在实现1对1的机器人足球对抗赛。项目以树莓派3B作为主控制器,Arduino UNO作为底层驱动板,通过L298电机驱动模块控制四轮运动。
标签
项目特点
**完整的机器人足球系统**:集成了感知、规划和控制,实现1v1对抗。
**基于ROS的架构**:使用ROS Melodic进行节点间通信,便于模块化开发和调试。
**分层控制**:树莓派(高层)负责视觉处理和任务规划,Arduino(底层)负责电机驱动。
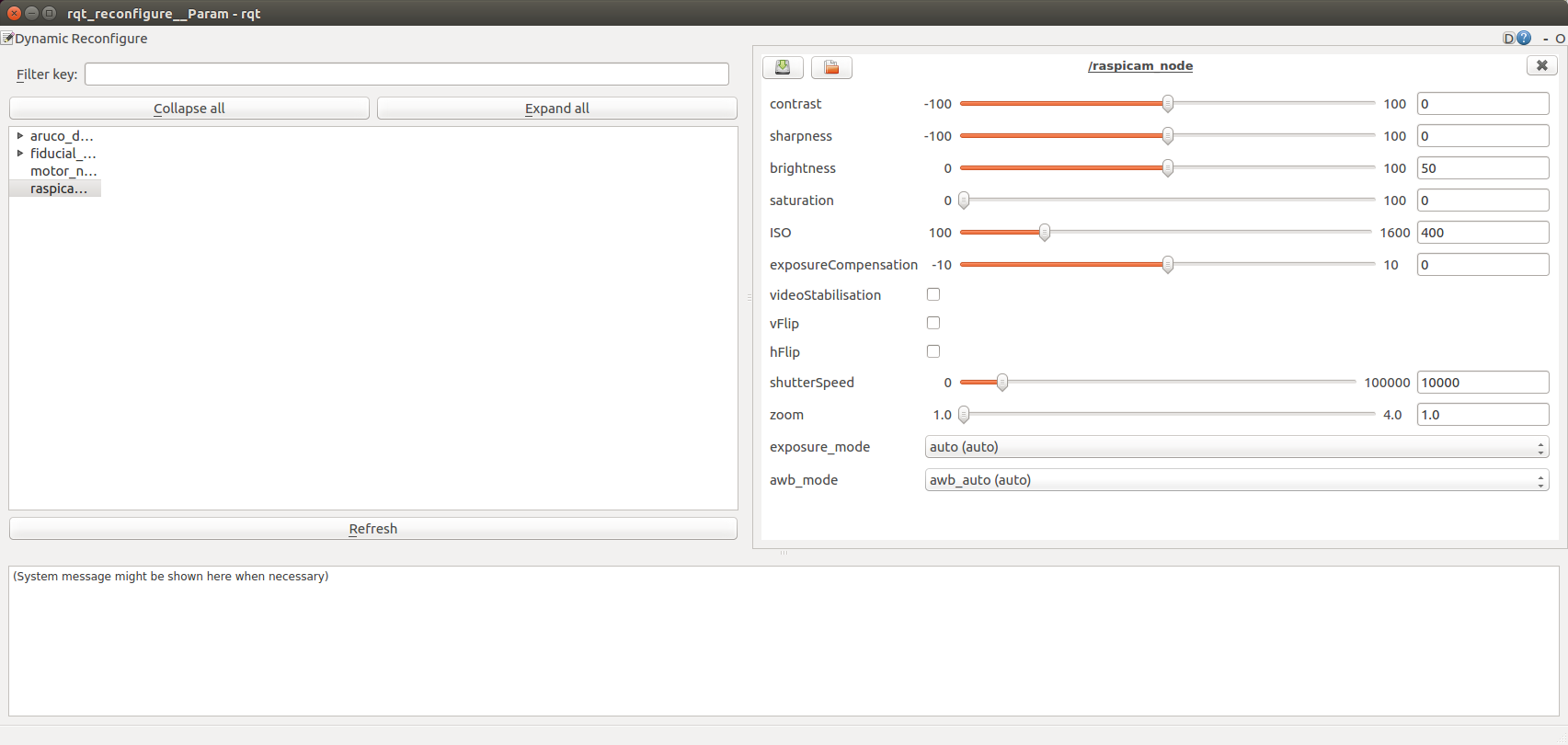
**视觉感知**:利用OpenCV进行红色球和蓝色球门的检测与跟踪。
**键盘控制**:支持通过键盘远程控制机器人运动,方便调试。
技术规格
| 主控制器 | Raspberry Pi 3 Model B |
|---|---|
| 底层控制器 | Arduino UNO |
| 电机驱动 | L298N (x2) |
| 驱动方式 | 四轮独立驱动 |
| 操作系统 | ROS Melodic (Ubuntu 18.04) |
| 视觉传感器 | Raspberry Pi Camera v2 |
| 通信方式 | Wi-Fi (同一网络) |
| 编程语言 | Python, C++ (Arduino) |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| Raspberry Pi 3 Model B | 1 | — | 运行ROS主节点 |
| Arduino UNO | 1 | — | 控制电机驱动 |
| L298N 电机驱动模块 | 2 | — | 驱动四个电机 |
| 直流减速电机 (带编码器) | 4 | — | 四轮驱动 |
| 机器人轮子 (约65mm) | 4 | — | 适配电机 |
| Raspberry Pi Camera v2 | 1 | — | 视觉感知 |
| 移动电源或锂电池组 | 1 | — | 为树莓派和Arduino供电 |
| 7.4V 或 11.1V 锂电池 | 1 | — | 为电机驱动供电 |
| 亚克力或金属底盘 | 1 | — | 承载所有部件 |
| 杜邦线、面包板等 | 若干 | — | 电路连接 |
能力画像
⚪ 记忆与知识检索: 2/5
🔵 逻辑推演: 4/5
⚪ 表达与交流: 1/5
⚪ 感知与观察: 4/5
⚪ 数理与计算: 4/5
⚪ 动手与操作: 4/5
⚪ 狂热与坚持: 3/5
⚪ 创造与创新: 3/5
项目图库
所需技能
🔧 **动手能力**:需要组装四轮机器人底盘,连接电机驱动、Arduino和树莓派,以及焊接电池和电机线。
💻 **编程能力**:需要熟悉ROS (Melodic) 的基本操作,包括创建工作空间、编译、运行节点。需要Python编程经验,用于编写视觉和控制器节点。需要了解Arduino编程,用于加载电机驱动固件。
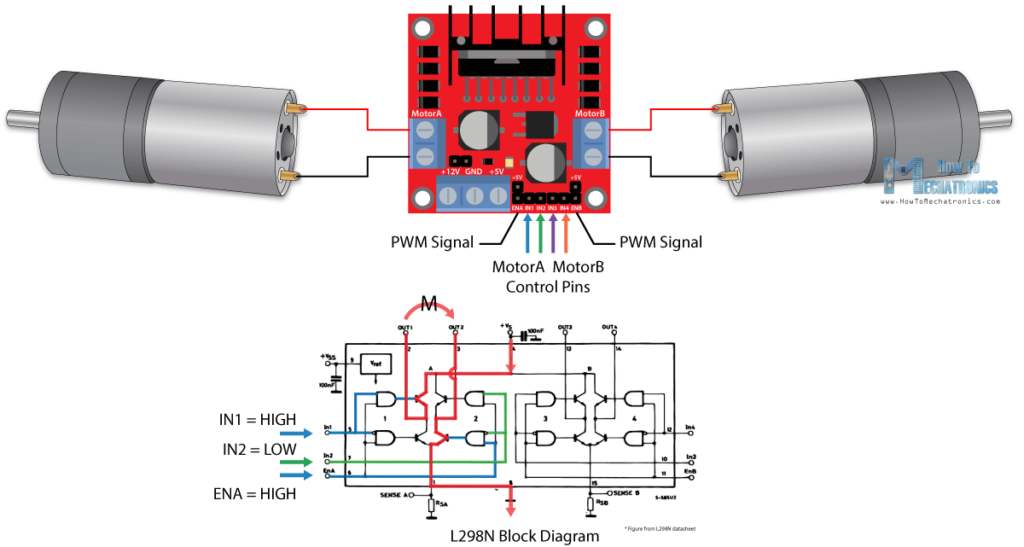
⚡ **电子电路**:需要理解L298N电机驱动模块的工作原理,以及如何与Arduino和电机连接。需要了解电源管理,为不同电压的组件供电。
适用场景
**机器人竞赛**:作为1v1机器人足球比赛的平台。
**ROS学习**:一个完整的ROS项目案例,涵盖感知、规划和控制。
**嵌入式系统实践**:结合树莓派和Arduino进行分层控制的实践项目。
**计算机视觉应用**:在真实机器人上实现基于OpenCV的目标检测和跟踪。