MATE ROV 水下机器人软件仓库
mate-rov
竞赛
1/5
🧩 软硬件结合
已发布

项目简介
MATE ROV开发的单一仓库。
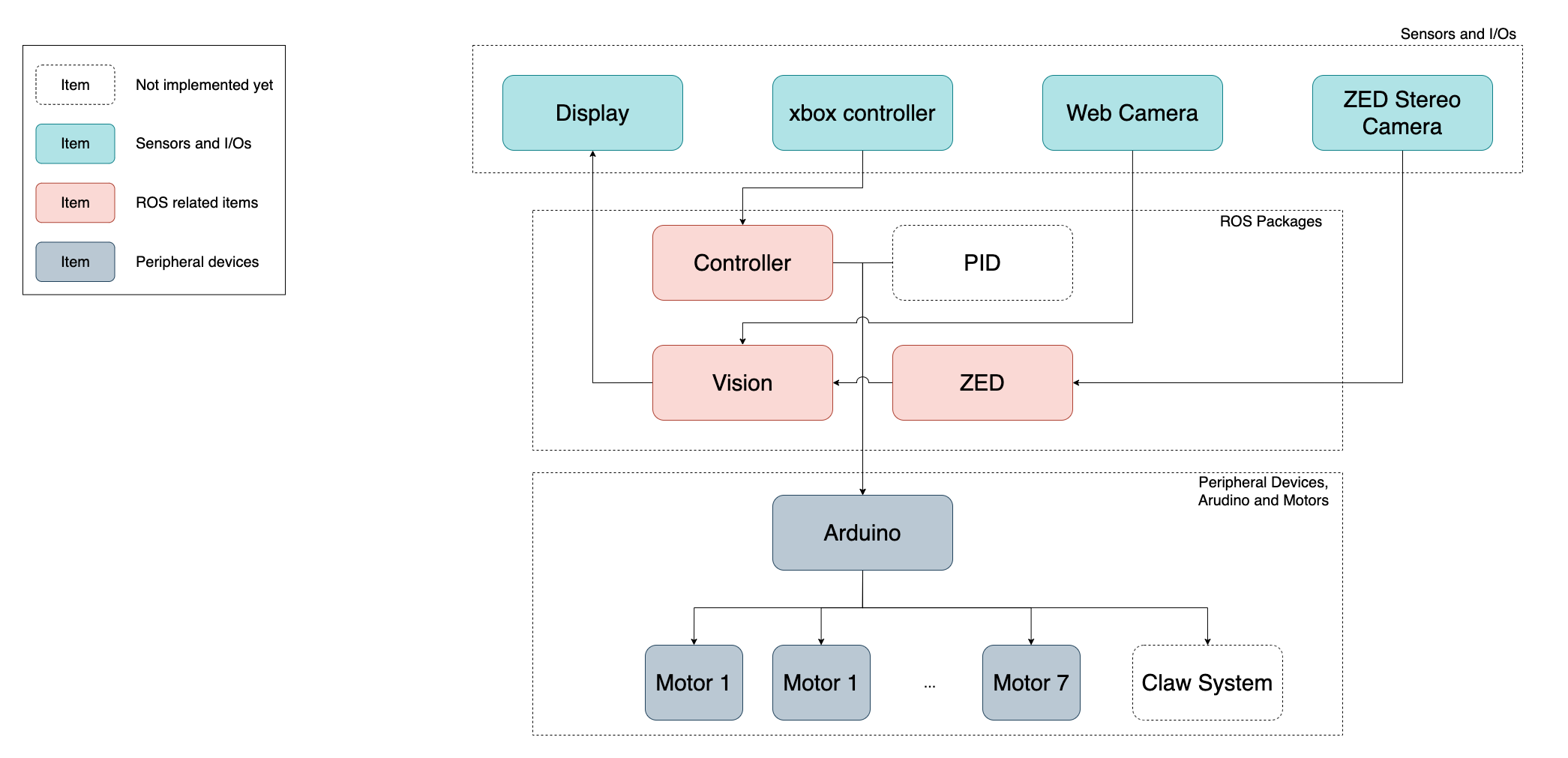
mate-rov 是哥伦比亚大学机器人俱乐部(CURC)为参加 MATE ROV 水下机器人竞赛而开发的开源项目。该项目采用单仓库(mono-repo)结构,集中管理所有与水下机器人相关的代码,包括 ROS 软件包和 Arduino 控制器程序。核心功能是通过 ROS(机器人操作系统)实现水下机器人的驱动控制、传感器数据处理和任务逻辑调度,同时利用 Arduino 微控制器直接控制电机等执行机构,形成从上层决策到底层驱动的完整软件链路。
标签
项目特点
**单仓库管理**:将 ROS 包与 Arduino 代码统一管理,便于版本控制与协作。
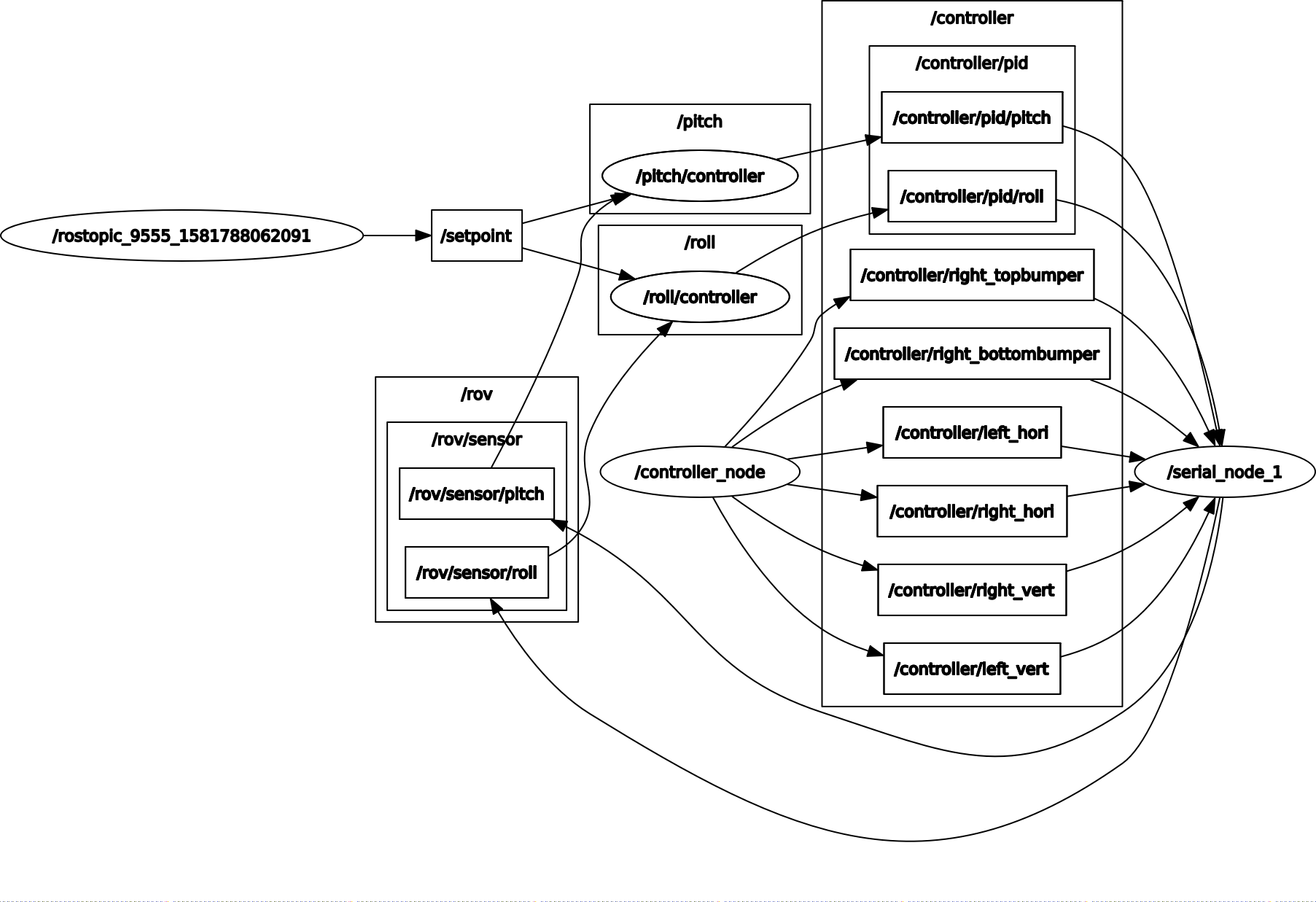
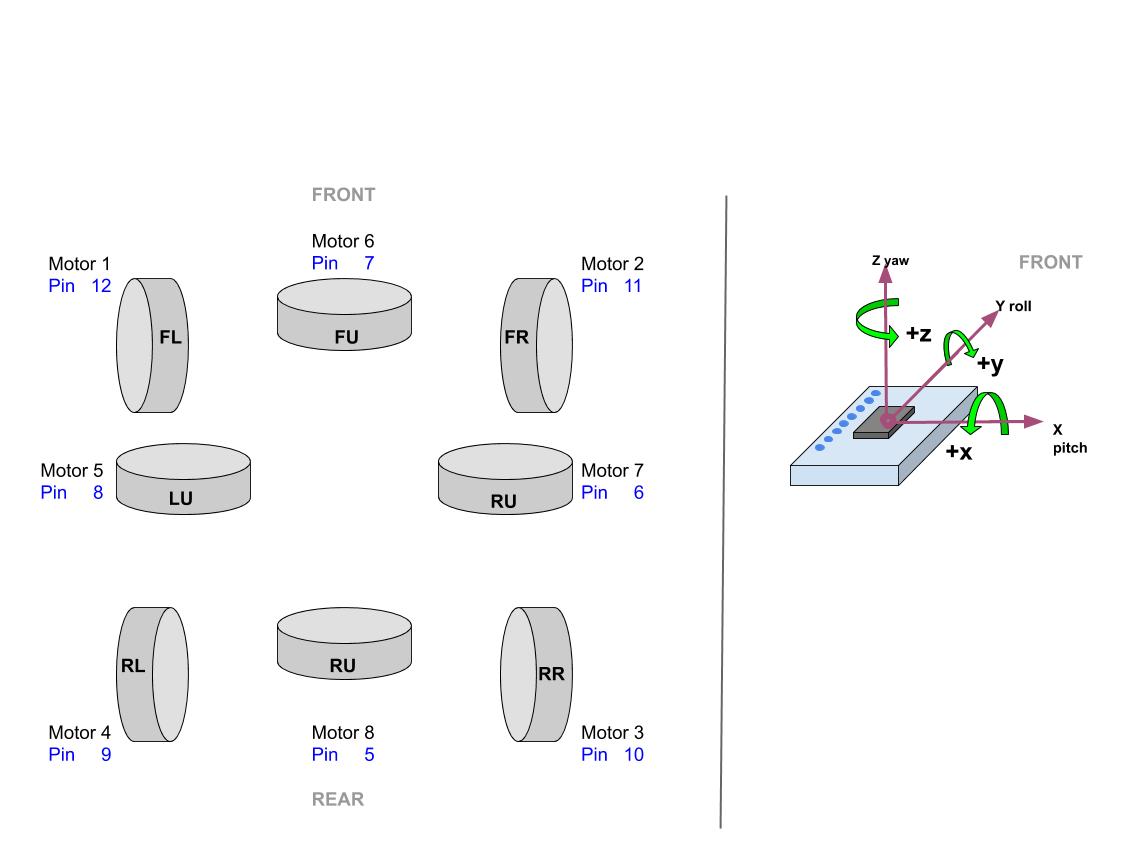
**ROS + Arduino 分层架构**:上层使用 ROS 进行任务调度与通信,下层使用 Arduino 实现实时电机控制。
**面向竞赛开发**:代码结构针对 MATE ROV 竞赛任务设计,易于扩展和调试。
**清晰的贡献流程**:规定了分支命名规范、提交信息格式和 PR 审批流程,适合团队协作。
技术规格
| 操作系统 | Linux(推荐 Ubuntu) |
|---|---|
| ROS 版本 | Melodic Morenia |
| 微控制器平台 | Arduino |
| 编程语言 | C++(ROS/Arduino) |
| 构建工具 | catkin_make |
| 通信方式 | ROS 话题/服务,串口(Arduino) |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| ROS Melodic | 1 | — | 必须安装 |
| Arduino IDE | 1 | — | 用于上传固件 |
| Arduino 开发板 | 1 | — | 具体型号未指定 |
| ROV 本体 | 1 | — | 需自行搭建 |
能力画像
⚪ 记忆与知识检索: 2/5
🔵 逻辑推演: 3/5
⚪ 表达与交流: 2/5
⚪ 感知与观察: 2/5
⚪ 数理与计算: 3/5
⚪ 动手与操作: 4/5
⚪ 狂热与坚持: 3/5
⚪ 创造与创新: 3/5
项目图库

所需技能
🔧 **动手能力**:需要搭建 ROV 硬件平台,连接 Arduino 与电机、传感器等外围设备。
💻 **编程能力**:需要掌握 C++ 编程,熟悉 ROS 节点、话题、服务等概念,以及 Arduino 固件开发。
⚡ **电子电路**:需要了解电机驱动、串口通信、电源管理等基础电路知识。
适用场景
参加 MATE ROV 水下机器人竞赛的团队
学习 ROS 与 Arduino 联合开发机器人控制系统的开发者
对水下机器人感兴趣,希望从零开始搭建控制软件的爱好者