DumBot13 开源3D打印人形机器人平台。21/23DOF、120cm、17kg、达妙DM无刷电机、鲁班猫4主控、99%结构件3D打印、仅需拓竹A1即可完成。成本可控制在¥18,000以内.
DumBot13
人形机器人
3/5
人形机器人
已发布
项目简介
DumBot13开源3D打印人形机器人,21/23DOF,成本¥18,000内。
标签
项目特点
**高性价比人形机器人**:整机成本控制在¥18,000以内,大幅降低人形机器人入门门槛。
**全3D打印结构**:99%结构件可3D打印,仅需拓竹A1即可完成,无需额外CNC或注塑。
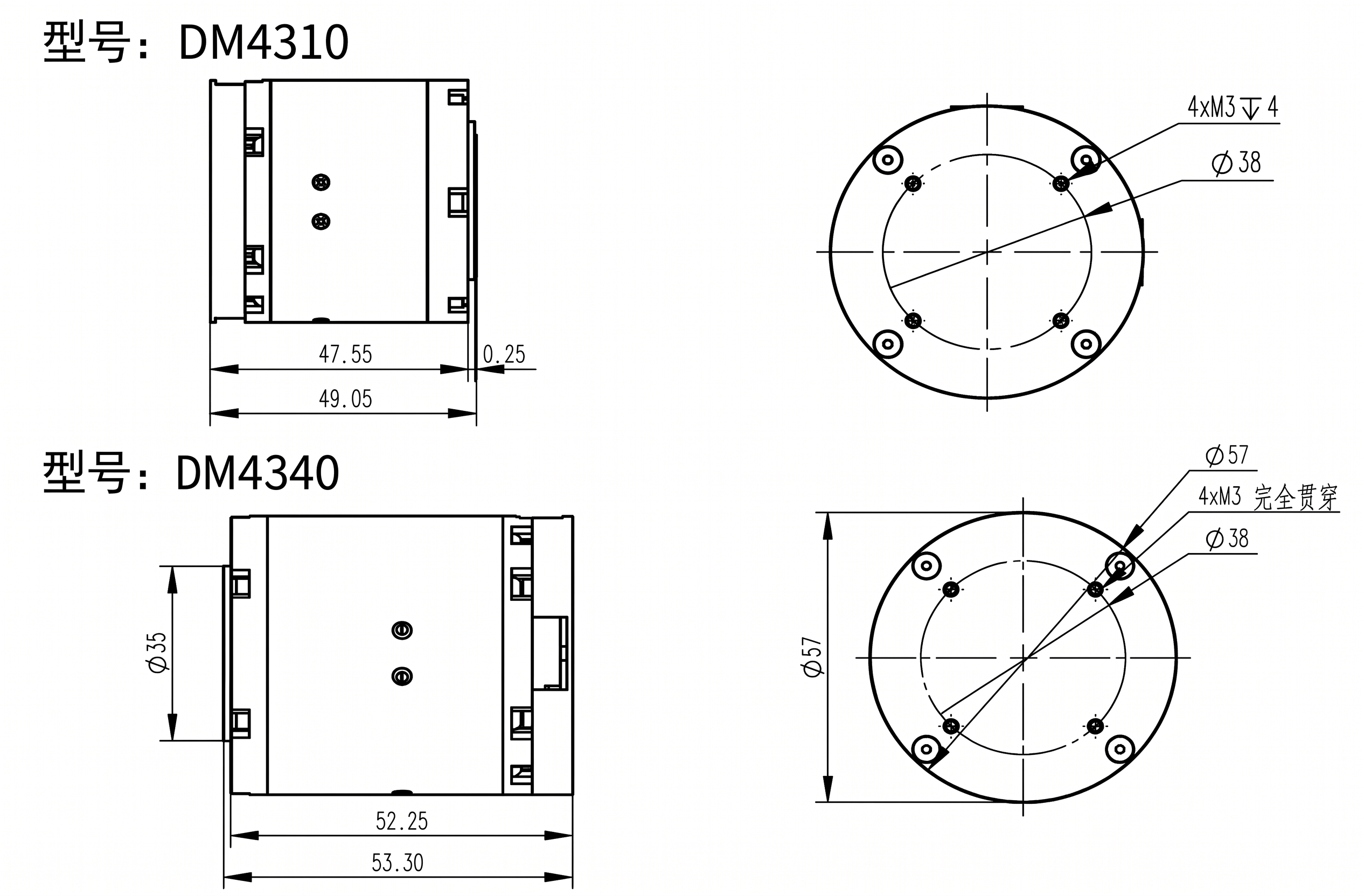
**高性能无刷电机**:采用达妙DM系列无刷电机,提供高扭矩、低噪音的关节驱动。
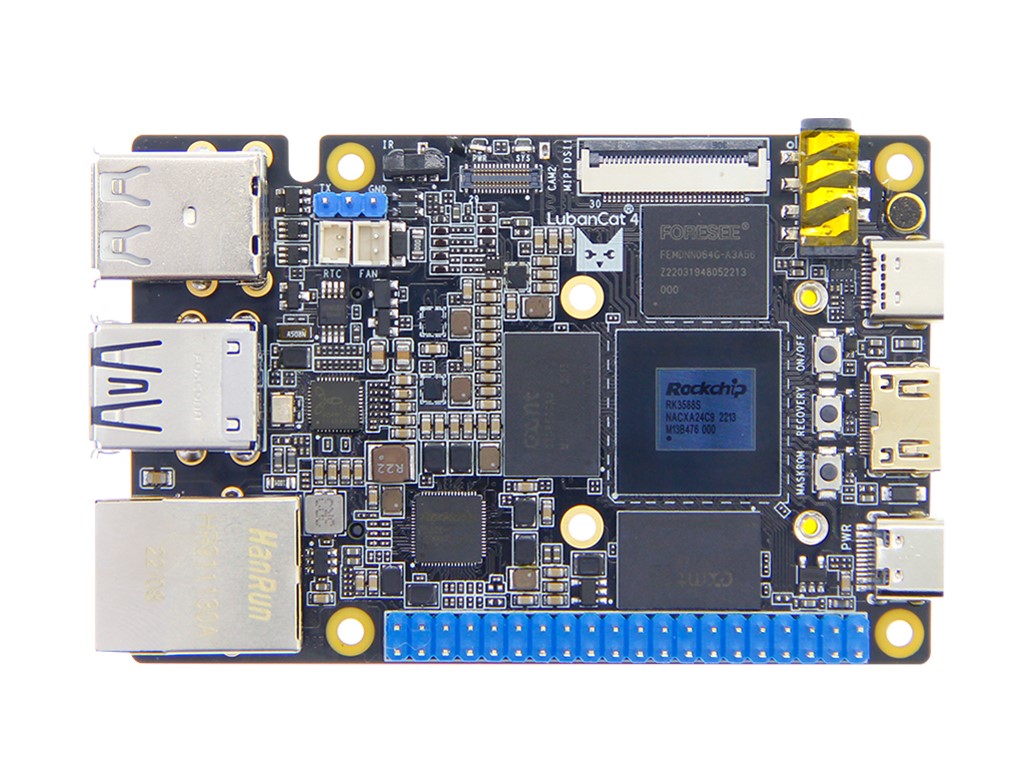
**强大主控平台**:搭载鲁班猫4(RK3588),支持ROS2、视觉处理、AI推理等复杂任务。
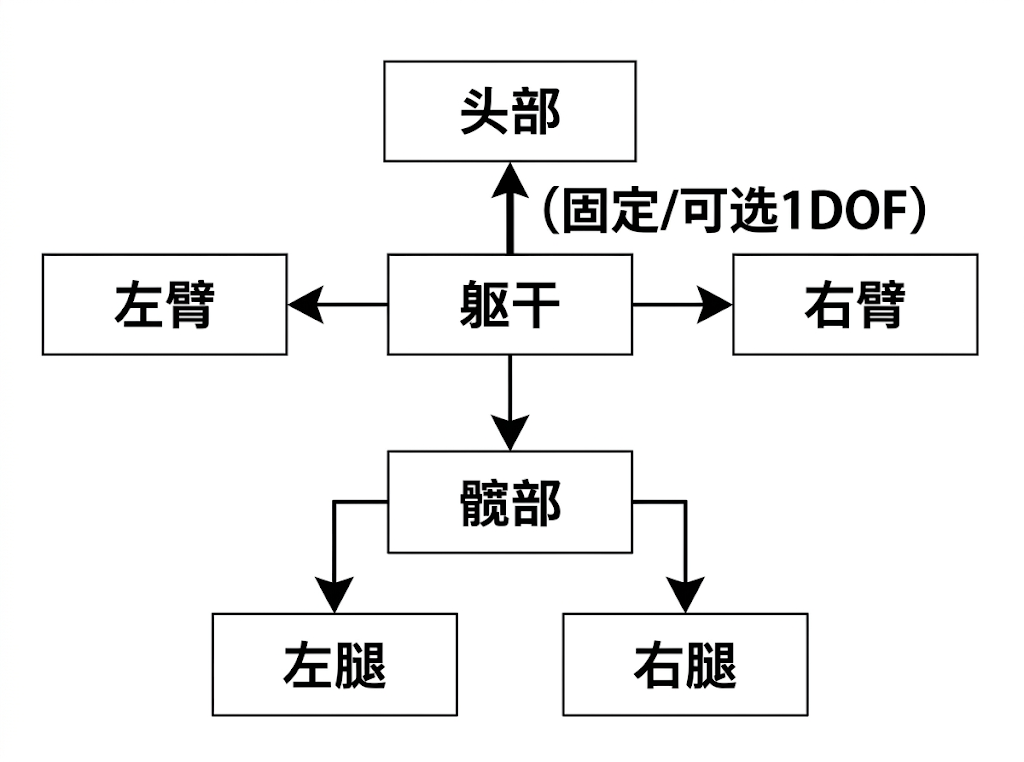
**灵活自由度配置**:支持21或23个自由度,可根据需求调整关节布局。
**完全开源**:遵循CC BY-NC-SA 4.0协议,提供完整图纸、代码和BOM表。
技术规格
| 身高 | |
|---|---|
| 重量 | |
| 自由度(标准) | |
| 自由度(扩展) | |
| 关节电机 | |
| 主控制器 | |
| 3D打印占比 | |
| 推荐打印机 | |
| 控制框架 | |
| 开源协议 | |
| 整机成本 |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| 达妙DM无刷电机 | 21-23 | — | 根据DOF配置 |
| 鲁班猫4(RK3588) | 1 | — | 核心计算单元 |
| 3D打印结构件 | 1套 | — | 99%结构,PLA/PETG |
| 锂电池组 | 1 | — | 推荐6S 22.2V |
| IMU模块 | 1 | — | 姿态检测 |
| Wi-Fi/蓝牙模块 | 1 | — | 集成于主控 |
| 电机信号线/电源线 | 1套 | — | 按需裁剪 |
| M3/M4螺丝螺母 | 1套 | — | 标准五金件 |
能力画像
**记忆与知识检索**:2/5 — 项目文档和社区资源有限,需要自行查阅电机和主控手册。
**动手与操作**:5/5 — 需要大量机械组装、走线、调试,动手能力要求极高。
**编程与算法**:4/5 — 需要编写ROS2节点、运动控制算法和视觉处理代码。
**设计与建模**:3/5 — 结构件已提供STL,但修改或优化需掌握3D建模。
**实验与调试**:4/5 — 电机PID调参、重心平衡、步态调试需要反复实验。
**协作与分享**:3/5 — 开源社区活跃度中等,可通过GitHub Issue和PR协作。
**学习与研究**:4/5 — 涉及机器人学、控制理论、嵌入式系统等多学科知识。
**系统集成**:5/5 — 需要将机械、电子、软件、通信系统完整集成。
项目图库






所需技能
3D打印机操作与维护
机械组装与走线
嵌入式系统开发(RK3588/Linux)
ROS2基础与节点编写
电机控制与PID调试
基本电路检测与焊接
机器人运动学与步态规划
Git版本控制与开源协作
适用场景
高校机器人课程设计与毕业项目
人形机器人算法研究与验证平台
开源硬件社区DIY与二次开发
机器人竞赛(如RoboCup、FIRST)
个人极客制作低成本人形机器人
企业原型验证与概念展示